
某多频段数传天线的结构优化设计与仿真
2024-01-02 06:53刘双荣张晋华赖国泉张天乐
航天制造技术 2023年5期
刘双荣 张晋华 赖国泉 王 洪 张天乐
(上海航天电子技术研究所,上海 201109)
1 引言
数传天线主要用来将卫星等航天器的遥感数据传输给地面站或其他航天器,按照航天器工作轨道的不同可将数传天线分为:中低轨遥感卫星数传天线、高轨遥感卫星数传天线、深空探测卫星数传天线[1]。
随着卫星轨道高度及主载荷能力的不断提高,对数传天线的增益、波束方向等电性能指标的要求越来越高,而增大数传天线口径是提高其增益比较有效且实用的途径之一[2]。数传天线口径的增大往往会导致其质量增大、刚度下降,对保证所需的天线形面精度付出的代价也会增加,且不利于数传天线在卫星上的布局。而对如何兼顾数传天线的口径、质量、刚度、精度及整星布局提出了挑战。
对国内外传输型遥感卫星数传天线的分析,采用较多的是固面反射器数传天线,同时增加二维驱动机构实现数传天线的两维扫描。如某数传天线采用二维驱动机构+小型固面反射器天线,实现了在方位向、俯仰向的±65°扫描[3,4]。而该天线的口径相对较小,固面反射器仅需采用较薄的蜂窝夹层结构即可实现较高的刚度,但较小的口面尺寸也制约了其增益的提高。
在提高数传天线扫描角度方面,文献[5]提出了一种方位向360°扫描的数传天线,其采用360°驱滑机构+根部展开结构+固面反射器的形式。该数传天线收拢状态下天线的高度仅有260mm,但其在长度方向上的尺寸较大。同时,为抵抗天线在卫星发射段的振动或冲击,数传天线主反射器上增加了两处火工品压紧点。
在提高数传天线增益方面,某深空探测器的定向天线采用口径为Φ2500mm(两侧切边300mm)的主反射器,天线的增益可达42dBi[6]。为保证天线的刚度,主反射器背部胶结一体化辐射型碳纤维帽型筋。在此基础上,文献[7]提出了一种用于深空探测的大型反射面天线的轻薄主反射器结构,该结构采用碳纤维蒙皮+背筋的结构形式。背筋采用变截面、多类型的三角网格筋结构,反射器口径可达4200mm,质量约35kg,基频可达70Hz,但其尚未再轨验证。
根据上述分析,现大口径、高增益、高精度、轻质量的数传天线大多采用蜂窝夹层结构,同时,为提高天线的刚强度,通常是在主反射器的背面增加适量背筋,但现有文献在背筋的形式选择及布置方式方面尚待完善。本文在现有研究的基础上,结合任务需求,对主反射器的背筋进行优化设计,并通过仿真及试验验证其结构的合理性;在天线增益方面,合理设计和分配主、副反射器的形面精度及装配精度。
2 方案设计
本文所述数传天线在整星上的布局及其主要组成,见图1。受整星包络限制,本文数传天线需偏转60°布置,该布局形式对数传天线的刚强度设计提出了较高要求,传统的蜂窝夹层结构已不适用。因此,本文借助文献[6,7]主反射器的设计形式:主反射器采用碳纤维铝蜂窝夹层结构+一体化碳纤维背筋的形式,并结合任务需求,见表1,对主反射器的背筋进行优化。
表1 数传天线主要技术指标

图1 数传天线布局方式及组成图
数传天线的二维驱动机构采用X-Y座架构型[3],X轴与Y轴正交;固面反射器为偏轴双反射器[8],其中主反射器最大尺寸为1350mm;副反射器采用频选设计,可选择通过不同频率的信号,其口径为Φ250mm;馈源采用多频段设计[1],主要在S、K、Ka 频段工作。为保证数传天线的增益,本文还讨论了主、副反射器的形面精度及两者的装配精度。
2.1 主反射器设计
在保证数传天线性能、主反射器质量尽量轻的原则下。对本文所述主反射器的背筋进行优化,主反射器的背筋可采用T 型筋或帽型筋,如图2a所示;背筋走向,如图2b所示。其中火工品压紧点安装尺寸a和b、环向筋直径尺寸d、辐射筋夹角分别为尺寸α和β、背筋高度尺寸为h,进而得到式(1)所示的优化模型:
图2 数传天线主反射器背筋类型示意
式(1)中,M0为本文所述数传天线收拢状态的基频指标40Hz;m为数传天线总质量;f(x)为数传天线在一定质量下天线刚度的优劣情况,f(x)越小表示基频越高,刚度越好。
分析数传天线在整星布局方式知,主反射器顶端的力学响应大于其余部分的,故取α≤β;且背筋的设计应满足传力路径尽可能简洁、高效,因此将火工品压紧点的中心布置在环型筋与辐射筋的交点处,如图2b所示;为确保数传天线与整流罩间有足够间隙,结合经验本文取背筋高度h=55mm、d=980mm。故将式(1)改写为式(2):
2.2 反射器精度设计
由Ruze 公式知,数传天线的增益与主副反射器表面均方根误差相关,在口面直径一定时表面均方根误差越小(即面精度越高)增益越大。根据实际工程经验,卫星通信类高增益天线,其主反射器表面理想均方根误差σ取值应满足式(3)[6,9]:
式中,λ为数传天线的工作波长,f为工作频率,c为光速,考虑到主反射器表面均方根误差σ包含随机误差σs(含制造误差、脱模引起的变形等)和系统误差σX(外界载荷引起的变形等)。根据工程实际经验,存在式(4)[10]:
根据文献[10],随机误差Sσ和系统误差Xσ对反射器表面均方根误差的影响因子未知时,作如下假设:两者对反射器表面均方根误差的影响因子均相同。即主反射器设计时,其表面均方根误差σ′应满足:
副反射器相对主反射器而言,其尺寸小、容易成型,表面均方根误差fσ一般取主反射器均方根误差σ′的1/3~1/2[9],即:
2.3 天线装配精度设计
根据需求,不含二维驱动机构时天线的指向精度应优于0.06°。而影响数传天线指向精度的因素主要包括:主反射器的变形、馈源及副反射器的装配精度[9]。本文所述数传天线服役期间主要受太阳辐射、热循环等,其引起的主反射器热变形相比其面精度σ′较小;馈源与主反射器装配时通过销钉定位,且为小间隙配合,因此本文暂不讨论数传天线服役期间主反射器在载荷作用下产生的变形及馈源装配时其相位中心横向位移对指向的影响。
而副反射器的装配精度可简化为:主副反射器的同轴度及高度,即副反射器轴线与主反射器基准轴V的同轴、副反射器顶面A与主反射器安装面B的高度,见图3。
图3 主、副反射器装配示意
副反射器与主反射器的理想高度H为副反射器的其中一个焦点(远离馈源端)与主反射器的焦点2F重合时的副反射器顶面A与主反射器安装面B之间的距离。由文献[9]知,控制主副反射器的实际装配高度h,即为控制两者的轴向偏焦量δ,存在:
轴向偏焦量δ与数传天线的工作波长λ有关,根据实际工程经验,有:
而主副反射器的理想高度H与两者各自的曲线方程及副反射器的椭圆轴线偏转角偏角θ有关[8,11],即:
其中,FZ为主反射器的焦距;FF为副反射器的焦距;θ为偏轴双反射面数传天线中副反射器的椭圆轴线偏转角,见图3;F(FF,θ)是关于FF和θ的关系式[8]。因此,主副反射器装配时两者的高度应满足式(10):
副反射器轴线与主反射器基准轴V的同轴可表示为副反射器绕顶点O的偏转和副反射器的横向偏移,见图3。副反射器的横向偏移可通过等效成馈源相位中心相对主反射器的横向偏移计算,本文仅考虑副反射器绕顶点O的转动引起的数传天线波束偏ω[9],存在:
式中,γ为副反绕顶点O的转角,如图3所示;K为波束偏移因子,其值可通过查阅文献[9],利用插值法得到。
根据实际工程经验,转角γ一般很小,对数传天线的增益影响较小,而对波束指向影响较大;且转角γ相对副反射器焦距无限小,即可通过转角γ的大小约束由副反射器绕顶点O转动引起的同轴度公差Φ:
3 应用验证
本文所述数传天线工作的最高频段为Ka 频段,不扫描时的指向精度优于0.06°;主反射器口径D=1.35mm、焦距FZ=322.5mm;副反射器的焦距FF=46.35mm;通过查阅文献[10]中利用插值法得到波束偏移因子K≈0.76;天线总质量m≤35kg。
因此,由式(5)、式(6)、式(8)、式(12),分别得到主反射器的形面精度σ′为0.134mm;副反射器的形面精度fσ为0.045mm;主副反射器装配时的高度(或偏焦量)公差应满足δ≤0.56mm;主副反射器装配时的同轴度公差Φ≤0.275mm。
3.1 主反射器背筋优化及仿真验证
通过上文分析,主反射器的顶部两角端处,如图2所示,力学响应相对其他区域较大,因此可将式(2)中α角对应背筋末端布置在主反射器顶部的两角端处。同时为避免主反射器背筋与其背部吊点安装区域的干涉,将α初始值设为80°,通过试凑法由式(2)及仿真软件Nastran 得到如结果,如表2所示。
表2 背筋布置仿真结果
如表2所示,在数传天线总质量一定的情况下,背筋夹角α、β在分别取82°和120°时,数传天线的刚度相对较好。同时,本文也仿真分析了在α= 82°、β=120°时,背筋类型为T 型筋或帽型筋时的数传天线前3 阶模态,见表3,分别采用T 型筋或帽型筋时天线的基频云图,见图4。

表3 不同背筋类型下的天线模态
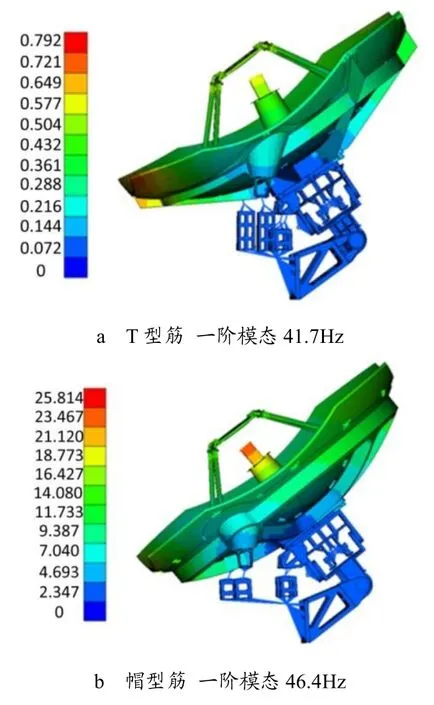
图4 不同背筋类型下的天线前一阶模态对比
如表3、图4所示,当采用帽型背筋时,本文所述天线的基频相比T 型筋高约4.7Hz,且其第三阶模态可达60Hz 以上,主要是因为帽型筋相比T 型筋稳定性更好;而在保证背筋质量一定的前提下,T 型筋的高度大于帽型筋的高度,进而加剧了T 型筋易失稳的特性。
从生产工艺角度分析,T 型筋的成型模具较易,但筋的生产工艺较复杂;帽型筋的成型模具为一体式模具,其加工成本及复杂度较高,但筋的生产工艺简单。因此,在综合考虑天线力学性能、生产工艺及成本下,本文所述数传天线主反射器的背筋采用帽型筋。
在上述基础上,利用Nastran 软件进一步仿真计算。在采用帽型筋时,本文数传天线在展开状态下的基频大于5Hz,见表4,满足了任务需求,且天线展开状态下的第3 阶模态可达15.8Hz,进一步表明了数传天线在展开态下刚度较好,本文采用的背筋形式及背筋布置方式合理、可靠,保证了天线的电性能。
3.2 力学试验验证
为进一步验证本文所述数传天线的力学性能,开展了数传天线的正弦振动试验工作,试验条件见表5。如图5所示,给出了数传天线在正弦激励(Y向)下主反射器顶点的响应曲线;如表6所示,给出了本文所述天线主反射器的顶端、底部以及副反射器的背面中心部分在正弦激励下的响应值。
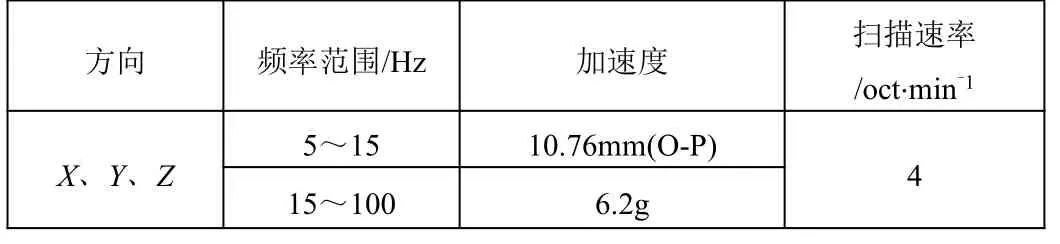
表5 天线正弦振动试验条件

表6 正弦激励下天线各测点最大响应值
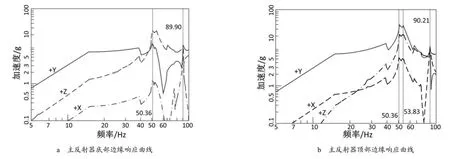
图5 正弦激励(+Y 向)下天线顶点及底部的响应曲线
如表6所示,本文所述数传天线在正弦激励下最大响应点出现在副反射器上为66.8g,对应的频率为100Hz,主要原因:在此布局下,副反射器靠四根杆件支撑,稳定性相对天线的其他部分较弱;且由于电性能的要求,副反射器的布局位置较高,进一步导致其刚强度相对其他部分较弱。
如图5所示,本文所述天线的实际基频约为50.4Hz。如表3所示,与仿真结果相比,实际基频略高于理论仿真基频5Hz,而造成基频偏差的主要原因如下:
a.主反射器为碳纤维铝蜂窝夹层结构,仿真时碳纤维铺层与铝蜂窝夹层采用共节点约束,且阻尼参数为常数(或胶膜等效为线性);而实际中两者采用环氧胶膜进行胶结,阻尼会随着加载力的变化发生漂移,进而影响天线的基频;
b.主反射器的蜂窝夹层与背筋采用环氧胶胶结,而实际胶结时两者配合曲面之间存在部分间隙(模具误差及加工误差导致),为保证胶结质量,通常在间隙处填充碳纤维布或环氧胶,进而改变了背筋的铺层厚度及均匀性;理论仿真时该两部分为完全的共节点约束,仿真参数与实际性能参数存在差异。
4 结束语
通过上述分析,本文所述数传天线通过优化设计、仿真确定了主反射器背筋类型及布置形式,并合理的设计、计算确定了主副反射器的形面精度、装配精度,进而指导生产,对同类型产品具有一定的借鉴作用。同时,通过正弦振动试验,进一步验证了本文主反射器结构的合理性、可靠性。
猜你喜欢
中国人民公安大学学报(自然科学版)(2022年1期)2022-07-20
新疆大学学报(自然科学版)(中英文)(2022年2期)2022-03-27
计算机测量与控制(2021年8期)2021-08-23
山东交通科技(2020年2期)2020-08-13
载人航天(2019年1期)2019-03-07
电子制作(2017年20期)2017-04-26
成都信息工程大学学报(2017年6期)2017-03-16
电源技术(2016年9期)2016-02-27
电子器件(2015年5期)2015-12-29
航天器工程(2014年5期)2014-03-11
