基于目标速度追踪的城轨列车节能优化算法
2024-01-02 11:24张可心刘志刚邱瑞昌
都市快轨交通 2023年6期
沙 淼,张可心,刘志刚,邱瑞昌,陈 杰
(北京交通大学电气工程学院,北京 100044)
随着城市轨道交通的不断发展,列车运行能耗已成为行业的一个重点问题。针对列车运行速度曲线进行优化研究是降低城市轨道交通行业能源消耗量、提升运输服务质量的有效措施。
针对目标速度曲线优化问题,国内外学者最初是以节能优化为目标,展开了大量的研究[1-4]。随着理论研究的深入和乘客对于乘坐体验要求的不断提升,单纯地只考虑节能目标难以满足列车的实际运行场景。而综合考虑乘坐舒适性、线路限速、准时性等多种约束和目标成为了目前列车优化运行问题的研究趋势和热点。列车优化运行速度曲线求解方法大致可分为传统优化算法和智能算法。传统优化算法兼顾了多种约束,其中最常见的方法是极大值原理和动态规划。文献[5]对基于极大值原理得到的工况集和运行时机进行改进,提出了一种固定牵引恒速运行条件下求解最优惰行的数值算法,并设计了适用于地铁列车的最优节能速度曲线简化求解算法。文献[6-8]利用非线性规划和动态规划等方法研究了列车制动能量回收利用问题,在此基础上又提出了一种快速求解列车优化运行曲线的数学模型。文献[9]结合多目标优化理论设计了一种高效的模型求解算法,但是却没有对状态变量空间进行缩减,因此计算效率偏低,不利于工程推广。
以遗传算法为代表的智能优化方法自提出以来就充分表现了其在解决复杂非线性优化问题时的优越性,但是当处理列车优化运行这类问题时,搜索速度慢、易陷入局部最优解的缺点凸显,因此诸多学者提出了改进措施[10-13]。
本文针对陡坡路况提出了基于等效平均速度法的运行策略,针对目标速度改变的路况提出了合理利用惰行的运行策略,在满足多种约束下实现节能。将上述运行策略进行统一,最终设计了基于目标速度追踪的城轨列车节能优化算法。
1 列车优化运行模型
1.1 列车动力学模型
影响列车行进过程的力有牵引力、制动力和阻力。其中牵引力与制动力产生于列车内部,二者不同时施加在列车上,并且可以通过列车自身的牵引/制动特性曲线实时计算当前车速所对应最大牵引力/制动力的具体数值。列车运行过程中的阻力包括基本运行阻力和线路带来的附加阻力。
为了更好地模拟列车实际运行情况,本文采用均质棒模型进行牵引计算分析。该模型将列车整体等效为一个质量均匀分布的棒体,不考虑车厢间的相互作用力。而在计算线路附加阻力时,尤其是当列车同时处于两个不同类型的区间时,需要根据列车处于不同区间的长度来分别计算两部分的线路附加阻力,最后再进行求和。如图1 所示,列车总单位附加阻力为
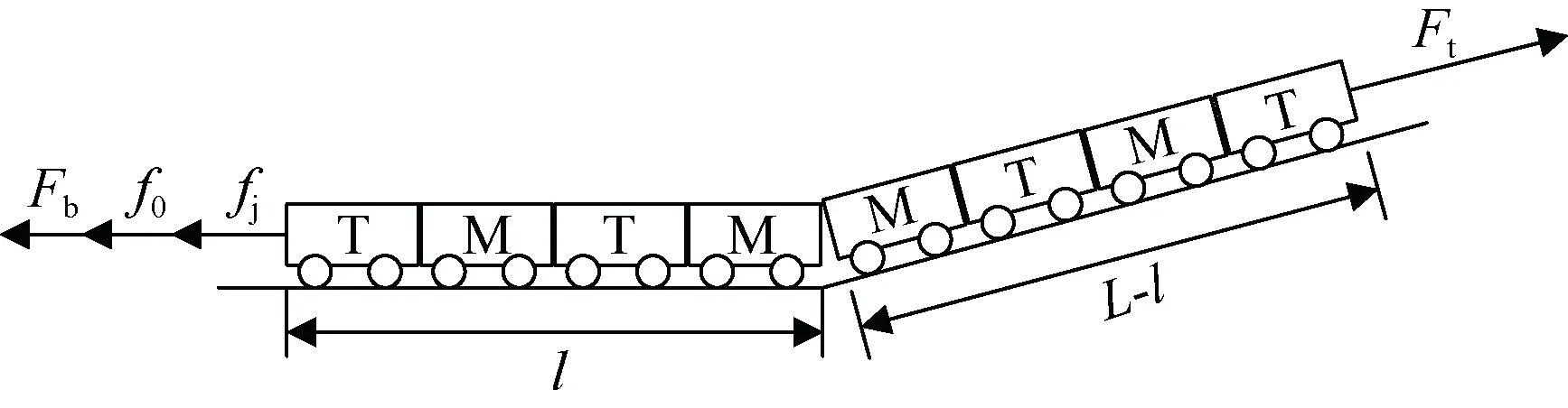
图1 列车均质棒模型受力分析Figure 1 Force analysis of homogeneous bar model of a train
式中,fj是总单位附加阻力;fjl,fj(L-l)分别是线路条件改变前后的单位附加阻力;l是列车位于后一区间的长度;L是列车长度。
列车的动力学方程为
式中,x是列车运行距离;ν是列车速度;t是列车运行时间;M是列车质量;γ是列车回转质量系数;g是重力常数;Ft是列车牵引力;Fb是列车制动力;ut与ub分别是牵引工况和制动工况下的控制系数,0≤ut≤1,0≤ub≤1;f0是单位质量基本运行阻力。
1.2 节能优化目标函数
除了节能这一优化目标,列车在运行过程中还需要兼顾运行时间、安全性、乘客舒适度、停车精度等约束。结合列车运行的动力学方程可得列车节能优化目标函数为
式中,ft(ν)、fb(ν)、f0(ν)、fs(x)分别为考虑列车回转质量后的最大单位质量牵引力、最大单位质量制动力、单位质量基本运行阻力以及当前位置对应的单位质量附加阻力;ηt和ηd分别是牵引工况和制动工况下列车动力系统的机电效率;α为列车再生制动能量利用率;x0与xf分别是线路的起点和终点;v(x)是列车在位置x的速度,v(x0)和v(xf)是列车在线路的起点和终点的速度;J为线路全程的运行能耗值;vlim(x)为列车当前位置x的限速值;ud和Fd分别是电制动的控制系数和当前车速对应的最大电制动力;ΔT为线路全程目标运行时间和实际运行时间的差值;ΔS为目标停车点和实际停车位置的距离误差;DA 为全程运行过程中加速度变化量的最大值,即冲动率最大值。
2 列车节能运行原理
2.1 节能运行操纵工况
由式(3)可知,列车节能优化目标函数是带有状态变量方程并且满足等式和不等式约束条件的最优化问题,因此可以利用极大值原理进行求解,对于状态方程,通过引入拉格朗日乘子λ1、λ2,构建哈密顿函数为

式中,M是针对列车运行的限速不等式约束而引入的互补松弛算子,其满足如下条件
考虑到H不显含t,则dλ1/dx=0,因此拉格朗日系数λ1为常数。令θ=ηtλ2/v,可将哈密顿函数进一步简化整理为
式中:um和fm分别是空气制动的控制系数和当前车速对应的最大空气制动力。
根据极大值原理,若要使得式(3)取得极小值,则哈密顿函数H取极大值。同时根据哈密顿函数表达式可知,可根据伴随变量θ的取值来选择合适的控制系数,使得H取得极大值。由此可以得到如表1 所示的7 种列车节能最佳运行工况及对应的控制系数取值。

表1 列车最佳运行工况Table 1 Optimal train operating conditions
2.2 运行能耗影响因素分析
列车运行能耗的高低体现在同一线路情况下同型号列车的不同运行结果比较。从任意两站间的固定线路出发,考虑影响列车能耗的因素主要包含:时刻表规定运行时间、站间运行方式、列车型号、车载设备能耗、总载荷、线路情况等。其中车载设备主要包含车载通风设备、照明设备、供电设备等,因此该部分能耗不能节省。而列车型号、总载荷、线路情况这类信息在列车出发前就已经固定,只能根据时刻表规定的运行时间来改变站间运行方式,从而实现列车的节能优化运行。因此影响列车运行能耗的主要因素有时刻表规定的运行时间和站间运行方式。
2.2.1 时间因素对能耗的影响
列车运行速度曲线和时间-能耗关系如图2 所示,列车运行在某一条线路上时,不同的运行策略对应的运行时间是各不相同的。首先定义常见的一种运行策略——最大能力运行策略,即采用最大牵引力加速到限速值,然后保持限速值匀速运行,最后采用最大制动力进行减速停车。因此最大能力运行速度曲线的运行时间是全程的最短运行时间Tmin。根据定义可知,最大能力运行曲线每一位置对应的速度值是该位置可能取得的最大速度值,该曲线也被称为外包络线,即区间所有可能存在的速度曲线均不可能超出该曲线所包络的范围,如图2(a)所示。因此该曲线不仅可以用来作为线路的安全速度曲线,也可以减小后续区间目标速度的搜索范围。

图2 列车运行速度曲线和时间-能耗关系Figure 2 Train operating speed curve and time-consumption relationship
由图2(b)可知,随着全程运行时间的增加,运行能耗随之减少。这是因为全程平均运行速度等于线路全长与运行时间的比值,所以全程运行时间越短,对应的全程平均运行速度也就越大。同时根据式(3)可知,列车牵引力做功一部分用于增加列车动能,另一部分用于克服基本运行阻力和线路附加阻力。由于线路条件固定,所以线路附加阻力做功的差异可以忽略。而基本运行阻力表达式也说明了运行速度越大,基本运行阻力就越大,进而列车能耗会随之增加。同样,用于增加动能而产生的能耗也随着速度的增加而增加。因此列车的运行能耗是随着运行时间的减小而不断增加的,换言之,运行时间越长,运行能耗越低。但是若运行时间无限延长,此时讨论列车的运行能耗是没有意义的,所以本文研究的列车节能优化问题是在线路时刻表规定的运行时间下进行求解的。
由于实际线路时刻表规定的运行时间一般都会比线路的最短运行时间长,所以可将富余时间定义为
式中,Tr为富余时间,即规定运行时间与最短运行时间的差值;Ttarget为线路时刻表规定的运行时间。
根据上述能耗分析和仿真结果可知,时刻表规定运行时间越长,即富余时间越长,列车的运行能耗也就越少。固定的一种运行策略下得出的结果在站间实际上存在多种运行策略,同时各自速度曲线对应的运行能耗也有所差异,如图3 所示。
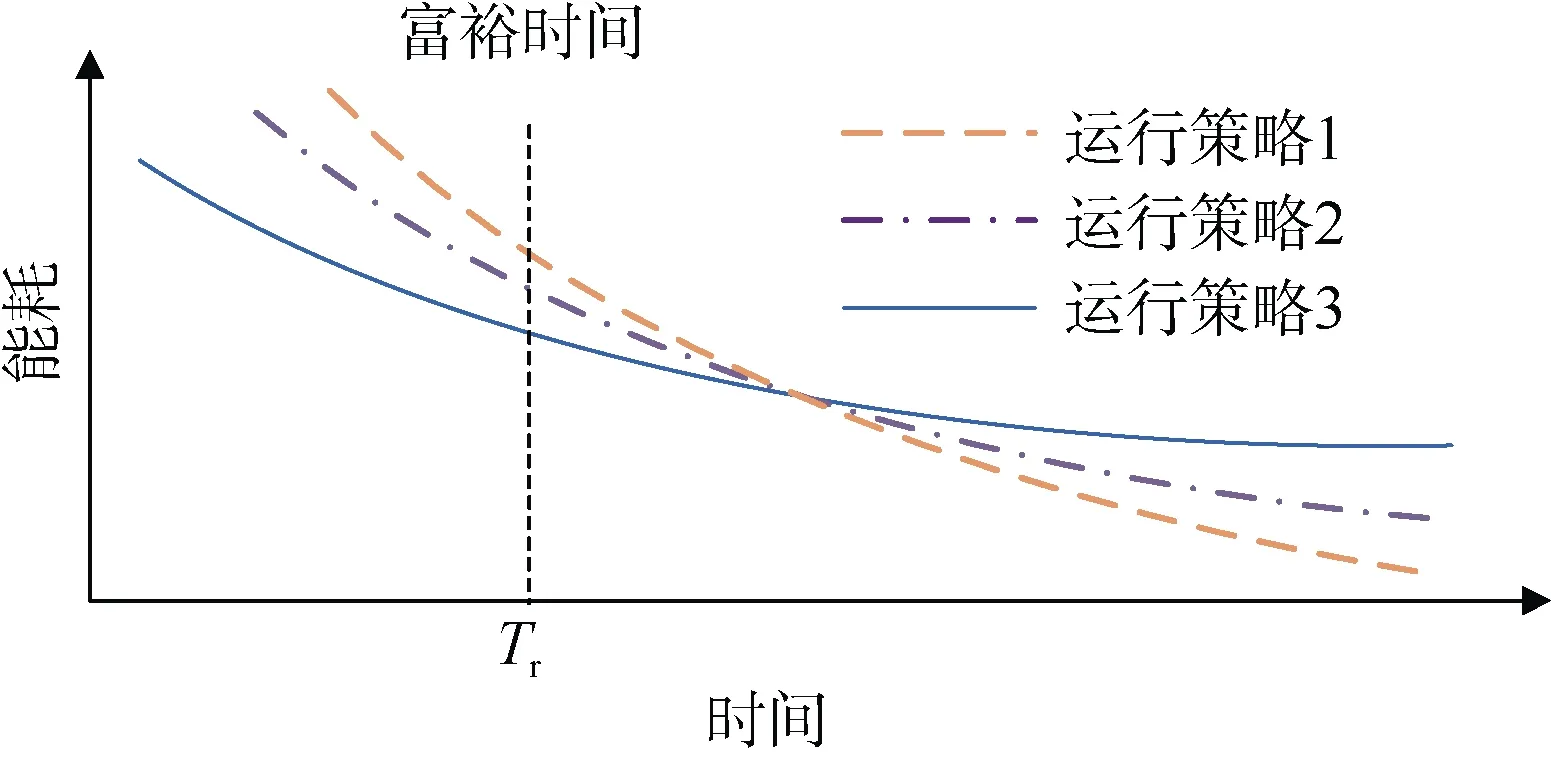
图3 不同运行策略对应的时间-能耗曲线Figure 3 Time-consumption curves corresponding to different operation strategies
综上,由于富余时间以及线路间不同运行策略的存在,使得列车的节能优化存在可能。基于此,本文在满足时刻表规定的运行时间即固定富余时间条件下,求解节能效果最好的运行策略。
2.2.2 站间运行方式对能耗的影响
列车在完成启动加速后和进站停车前的中间阶段,列车的运行速度不同,可将其大致分为匀速和变速两类运行方式,如图4 所示。
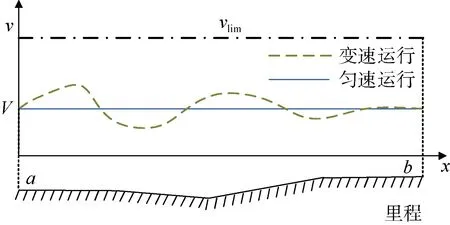
图4 匀、变速运行速度曲线示意Figure 4 Schematic illustration of operating speed curve for constant speed and variable speed
为探究列车运行方式和能耗之间的关系,假定列车在某区间ab内可以实现不触及限速的匀速和变速两种方式运行,并且在a、b两点列车的速度没有改变。所以列车在此过程中的牵引力做功用于克服基本运行阻力以及增加势能。
首先假定列车在ab区间可以实现以V为目标速度的匀速运行方式,即对于任意x∈[a,b],都存在v(x)=V。则整个区间的运行时间为
因为假定全程匀速运行,所以有utft(v)=f0(v)+fs(v),运行能耗为
式中,G(a)和G(b)分别是列车在a点和b点的势能。
若列车在区间内采用如图4 所示的变速运行方式,由于需要克服基本运行阻力以及增加势能,并且在区间始端和末端速度均为目标运行速度值,则存在固定条件,即
采用SPSS 18.0统计学软件对数据进行处理,计量资料以“±s”表示,采用t检验,计数资料以百分数(%)表示,采用x2检验,以P<0.05为差异有统计学意义。
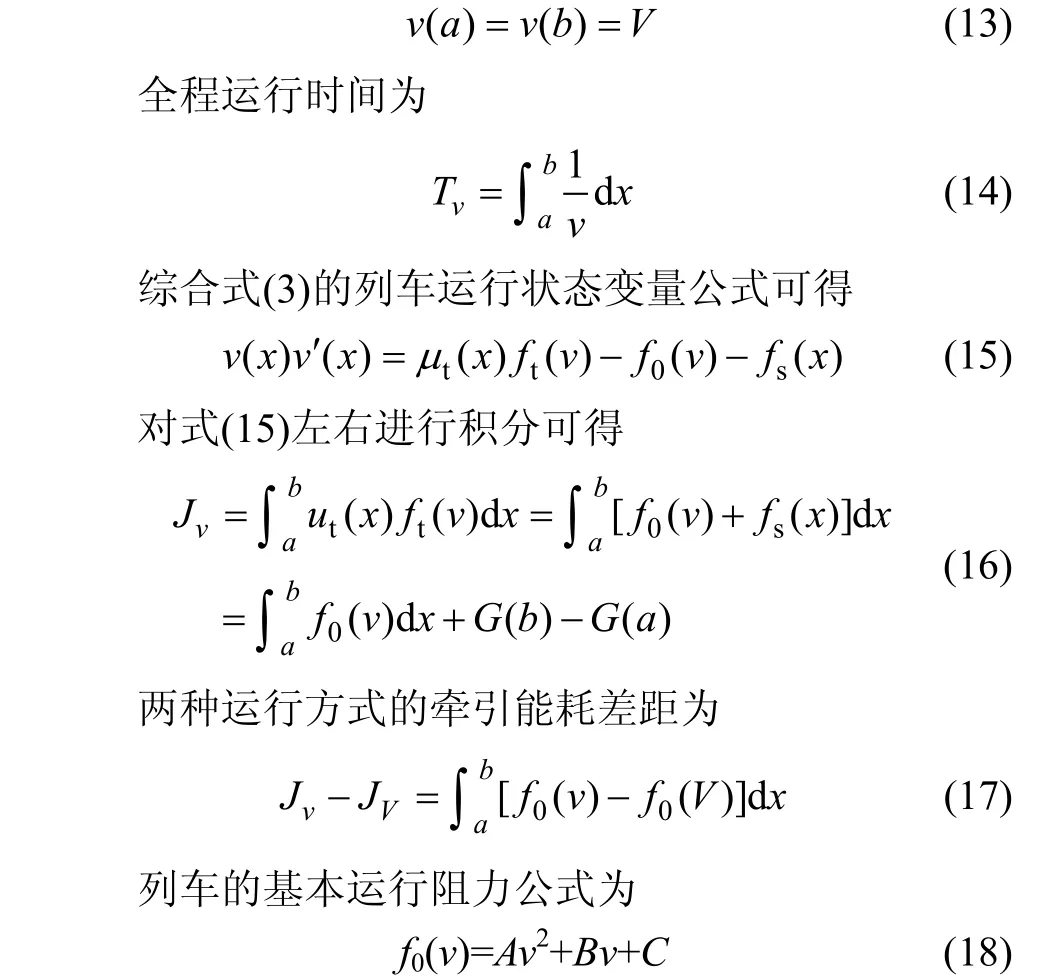
式中,A,B,C均为正数。定义函数φ(v)=vf0(v),易证该函数为严格凸函数,则对于任意的v≠V,存在

若两种运行方式的时间相同,即TV=Tv,对于v≠V,有Jv-JV>0,只有当v=V时,Jv-JV=0。通过上述推导可知,当列车在区间运行时间一定,区间起点终点速度一致时,采取匀速运行方式的能耗最小。
3 基于目标速度追踪的优化运行速度曲线求解
3.1 基于等效平均速度法的陡坡运行策略
鉴于运行时间和运行方式对能耗的影响,本文在处理大上坡这类的陡坡时,将综合考虑运行方式以及目标运行速度值,求解兼顾时间、能耗、速度等多方面因素的较优解。因此提出采用等效平均速度法来实现优化运行速度曲线的求解。以大上坡为例,如图5(a)所示,在入坡前的转换点搜索范围内通过二分法搜索到x0点,从该点开始工况转换为全力牵引,直到通过大上坡之后速度在x1点恢复至目标速度值Vtarget,工况由全力牵引转化为部分牵引恒速。若从x0点到x1点的平均运行速度和目标速度误差的绝对值最小,则认为该速度曲线为通过该大上坡的优化运行速度曲线,相应的优化目标数学表达式为

图5 陡坡运行速度曲线Figure 5 Running speed curve for steep slopes
式中,Vtarget为当前部分牵引匀速运行的目标速度值;x0为部分牵引恒速转全力牵引的工况转换点,x1为全力牵引转部分牵引恒速的工况转换点;t0为x0点对应的运行时刻,t1为x1点对应的运行时刻。
对于大下坡,类似于大上坡的处理方式,同样也采用基于等效平均速度法来实现优化运行速度曲线的求解。如图5 所示,在进入大下坡前的转换点搜索范围内通过二分法搜索到x0点,从该点开始工况转换为惰行,直到通过大下坡之后速度在x1点恢复至目标速度值Vtarget,工况由惰行转化为部分牵引恒速。若从x0点到x1点的平均运行速度和目标速度误差的绝对值最小,则认为该速度曲线为通过该大下坡的最优运行速度曲线。
在目标运行速度的基础上对陡坡进行处理时,没有考虑到特殊区间搜索范围相互影响、速度曲线触及限速等情况。因此本文在陡坡处理方法的基础上做进一步的优化,从而使得方案在处理特殊工况时具有更高的普适性。
3.1.1 确定陡坡工况切换点搜索范围
如图6(a)所示,以大上坡为例,求解工况转换点搜索范围的最左侧点时,大上坡末端以区间的目标运行速度向后反算全力牵引曲线与左侧恒速区会出现交点,若超出与之相连的前一恒速区的最左侧时还没有交点,则以与大上坡相连的前一恒速区的起点作为搜索范围的最左侧转换点。同理,求解工况转换点搜索范围的最右侧点时,在与大上坡相连的后一恒速区的终点,以区间的目标运行速度向后反算全力牵引曲线与左侧恒速区的交点,该点则为搜索范围的最右侧转换点。如图6(b)所示,在求解搜索范围以及搜索最优工况转换点的过程中,若速度曲线出现了触及限速的情况,则以限速值保持恒速运行。

图6 确定陡坡工况转换点范围Figure 6 Identifying the range of transition points for steep slope conditions
3.1.2 不同类型陡坡相连
若区间为大上坡或大下坡,并且区间目标速度小于限速值,并且相连的后面区间也是大上坡或者大下坡,则首先将连续的非缓和坡道整合为一个大的非缓和坡道。然后对组合后的非缓和坡道进行和单个陡坡同样的操作,寻找最优的工况转换点。
3.1.3 陡坡之间缓和区间过短
如图7(a)所示,在搜索最优转换点时,若前后两个非缓和坡道相隔较近,即中间间隔的恒速区间较短时,可能会存在前后两个搜索范围相互影响的情况。此时需要对中间恒速区从中点进行分割,使前半部分作为与前一非缓和坡道相连的后一恒速区,后半部分作为与后一非缓和坡道相连的前一恒速区。如图7(b)所示,通过这种方式就可以避免前后两个非缓和区间最佳转换点搜索范围的重合。
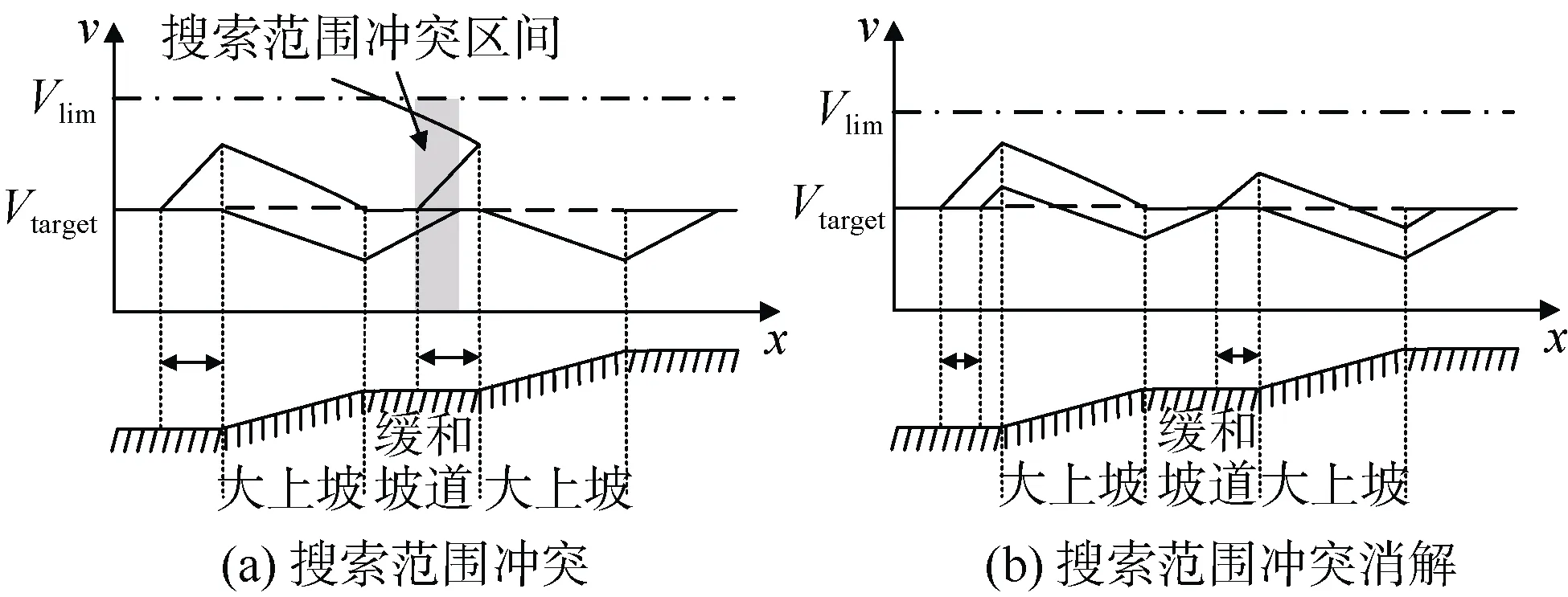
图7 两陡坡搜索范围冲突的处理Figure 7 Handling of two steep slope search range conflicts
3.1.4 陡坡触及限速的情况
当列车以限速值进入陡坡时,根据车身所处的陡坡类型选择合适的运行工况:若区间为大上坡,由于处于大上坡时即使采用全力牵引列车速度也会下降,因此这种情况下在区间一开始就采用最大能力牵引;若区间为大下坡,则采用部分制动保持恒速。
3.2 目标速度改变的运行策略
3.2.1 目标速度上升
首先判断区间类型,若线路为大下坡,如图8(a)所示,可以充分利用线路条件进行节能。在此工况下先从线路起始点以初始速度值进行全力牵引,若列车运行至区间末端时仍未达到目标速度值,则该区间只采用全力牵引工况;若列车在区间内部就加速到目标速度值,则从区间末端以目标速度值向后反算惰行曲线,求解与之前速度曲线的交点,则该区间最后的速度曲线就是从起始点全力牵引至交点,从交点惰行至区间末端。如图8(b)所示,假如该区间是其他类型的区间,则直接选择全力牵引,若未到区间末端就加速到目标值,则从该点开始以目标速度值一直匀速运行至区间末端。

图8 目标速度上升的运行策略Figure 8 Operation strategy for target speed increase
3.2.2 目标速度下降
文献[14]表明了目标速度下降的情况实际上是由于线路限速下降引起的,对于理想平直道上的进站停车情况,Howlett 等已证明了惰行加最大能力制动是有利于节能的操作。所以当全程匀速运行的目标速度值vtarget确定之后,确定惰行转制动时的速度值vb成为处理目标速度下降情况的关键。本节将直接引用文献[15]中推导出的匀速区间速度值和制动点速度值的关系式,计算惰行转制动开始点的速度值vb,并采用反向迭代计算的方式计算减速曲线。
如图9 所示,当区间目标速度小于初始速度vo时,则要从区间始端以目标速度值向后反算减速曲线。反算减速曲线时,若列车运行速度大于vb则采用惰行工况,若列车运行速度小于vb则采用制动工况。直到反算减速曲线与前面速度曲线相交,从交点更新减速曲线,并在当前限速区间保持目标速度值运行。

图9 目标速度下降的运行策略Figure 9 Operation strategy for target speed reduction
3.3 方案整体设计
基于目标速度追踪的优化运行速度曲线整体算法流程如图10 所示。算法的整体执行步骤如下。

图10 基于目标速度追踪的优化运行速度曲线求解流程Figure 10 Optimal running speed curve solution process based on target speed tracking
步骤1:首先计算线路的最大能力运行曲线,得出线路运行的最短运行时间Tmin,若线路目标运行时间Ttarget小于最短运行时间Tmin,则输出最大能力运行曲线为优化曲线,并终止算法;否则执行步骤2。
步骤2:寻优开始前设置较小的目标运行速度值vh以及较大的目标速度变化步长Δvh。
步骤3:根据目标运行速度vh计算对应的惰行转制动速度值vb,之后计算优化速度曲线:
a) 确定区间目标运行速度,划分坡道区间。
b) 根据区间的目标速度值和进入区间的初始速度值选择恰当的操纵工况:
区间起始速度小于目标速度时,选择全力牵引工况,并结合3.2.1 节目标速度上升的情况进行修正。
区间起始速度等于目标速度时,若区间为缓和坡道,则从区间起点就以初始速度采用部分牵引工况保持匀速运行;若区间为陡坡时,采用基于等效平均速度法的陡坡运行策略,并结合特殊情况的处理方法,利用二分法搜索最佳工况转换点,继而实现速度曲线的求解。
区间起始速度大于目标速度值时,采用3.2.2 节目标速度下降情况下所规定的操纵方法。
c) 计算速度曲线全程用时T。
步骤4:判断时间误差|T-Ttarget|,若大于时间误差要求,则进行如下操作:
a) 若T<Ttarget,则退出上一步增加的速度步长vh=vh-Δvh,并令速度步长减小为原来的1/2,即Δvh=0.5×Δvh。
b) 增加目标速度值vh=vh+Δvh,转向步骤3。
若|T-Ttarget|小于时间误差要求,则输出当前速度曲线,并终止算法。
4 结果验证
为验证所提出方案的有效性,采用上海地铁3 号线铁力路站—友谊路站线路进行仿真分析,线路信息如表2~4 所示。

表2 铁力路站—友谊路站线路弯道信息Table 2 Information of curves from Tieli Road to Friendship Road m
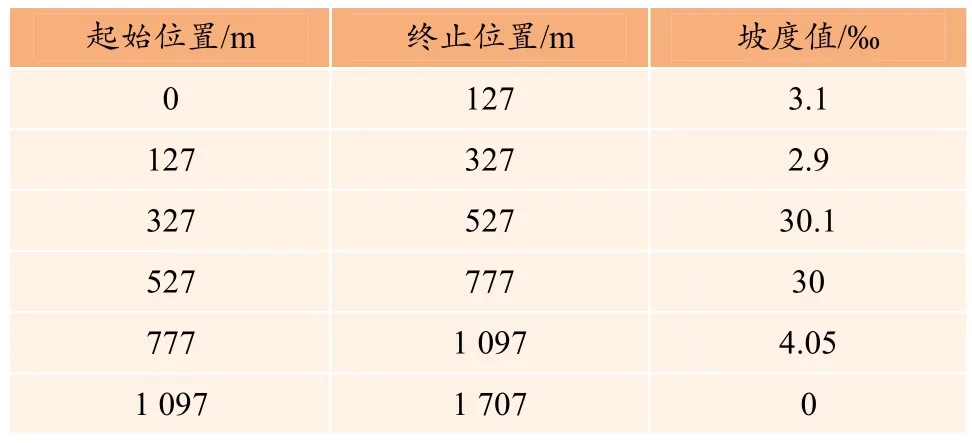
表3 铁力路站—友谊路站线路坡道信息Table 3 Information of slopes from Tieli Road to Friendship Road
上海地铁3 号线运营列车为阿尔斯通AC-03,整车为6 节编组,车身全长140 m,最高运行时速为80 km/h,图11 为列车的牵引特性曲线和制动特性曲线。
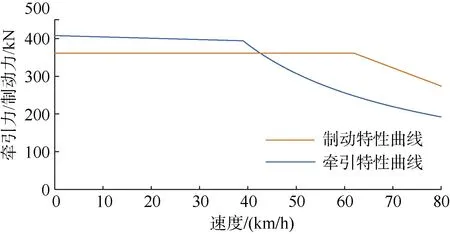
图11 牵引及制动特性曲线Figure 11 Traction and braking characteristic curve
在实际的运营过程中,列车用时133 s,同时文献[16]和文献[17]分别采用时间逼近搜索算法和四阶段遗传算法对该线路的速度曲线进行了优化。各个方案优化后的速度曲线和实际运行情况见图12,表5 分别列出了上述两种方案的运行结果以及采用本文设计的目标速度追踪法的优化运行结果。

表5 优化运行数据结果Table 5 Optimize operational data results
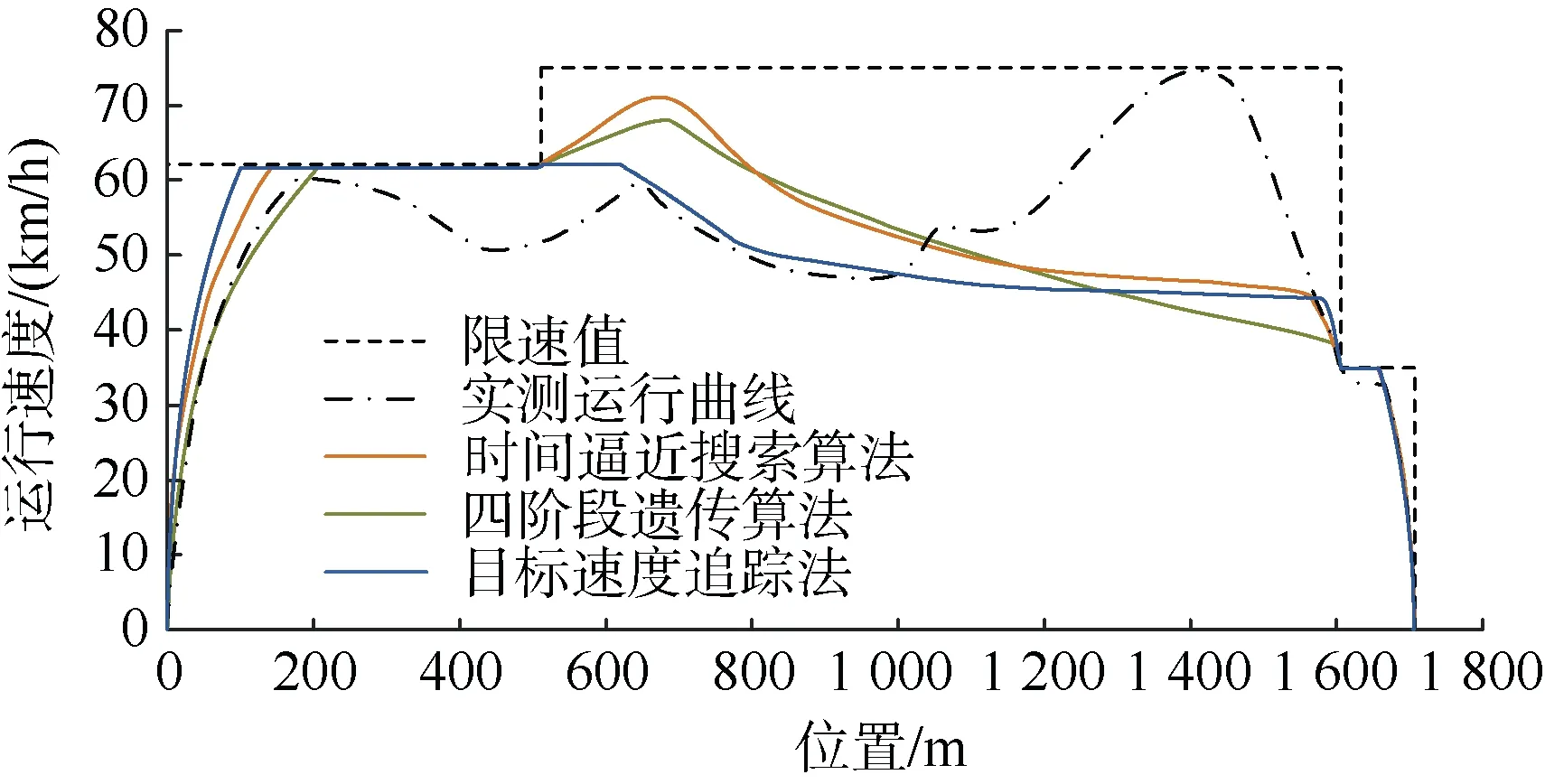
图12 运行速度曲线对比Figure 12 Comparison of operating speed curves
由表5 可知,与文献[16]和[17]中的优化方案相比,本文设计的优化方案能耗进一步减小,优化速度曲线惰行工况的起始点更加靠前,进一步扩大了惰行工况的应用范围,有效减小了牵引能耗,节能率可达25.39%。同时本文优化后的速度曲线最大运行速度更低,为63 km/h,速度曲线更加平缓。当列车运行速度偏大时不仅会对安全性能提出更高的要求,同时车身在运行过程中的磨损程度会加深、最大牵引功率也会变大。除此之外高速运行带来的振动噪声也会更加明显,从而影响车体结构的稳定性,降低乘客的舒适性。所以综合多方面因素考虑,基于目标速度追踪方法求解出的列车目标运行速度曲线更加适用于列车实际的运行情况。
5 结论
本文以节能为主要运行目标,推导了列车节能运行操纵工况,探究了影响运行能耗的两大因素,设计了新的城轨列车目标运行速度曲线优化方案,完成了节能运行操纵工况和坡道类型的进一步简化分类,基于运行方式对能耗的影响实现了基于等效平均速度法的陡坡运行策略的设计,提出了目标速度改变时充分利用惰行工况的节能运行操纵方法。结合以上运行策略,最终实现了基于目标速度追踪的城轨列车节能优化算法的设计。通过仿真验证,当设定相同运行时间的条件下,本文算法比列车实际运行节能25.39%,证明了算法的有效性。
猜你喜欢
中学数学研究(广东)(2023年9期)2023-06-03
中学生数理化·八年级物理人教版(2022年9期)2022-10-24
昆钢科技(2022年2期)2022-07-08
当代水产(2021年10期)2022-01-12
建材发展导向(2021年23期)2021-03-08
华人时刊(2018年15期)2018-11-10
装备制造技术(2017年6期)2017-07-31
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
实验技术与管理(2014年9期)2014-03-11
西安工程大学学报(2014年2期)2014-02-28