城市轨道交通飞轮储能系统控制策略研究
2024-01-02 11:41赵小皓宋嘉桐
都市快轨交通 2023年6期
赵小皓,张 钢,宋嘉桐
(1.北京市地铁运营有限公司,北京 100044;2.北京交通大学,北京 100044;3.国网北京通州供电公司,北京 101100)
近些年来,随着城市化进程的加快和城市轨道交通的高速发展,我国城轨的能源消耗问题也日益突出。2021 年,全国城轨交通总电能耗为213.1 亿kWh,同比增长23.6%,其中,牵引能耗106.2 亿kWh,占总能耗的49.8%[1]。通常情况下,城轨列车再生制动能量占总牵引能量的30%~60%[2],这部分能量除一部分被相邻牵引机车吸收利用外,剩余部分由列车的制动电阻或制动机械发热消耗掉,回收利用城轨列车的再生制动能量,对于减少能耗、抑制接触网网压波动以及提高供电系统稳定性具有重要作用。
国内外应用较为广泛的再生制动能量利用方式主要包括电阻能耗型、逆变回馈型、电容储能型、飞轮储能型等。城市轨道交通具有车站数量多、站间运行距离短、启停频繁、瞬时功率大等特点,而飞轮的储能密度大、效率高、瞬时功率大、响应速度快,且维护周期相比于其他储能装置更长,与城轨的运行特性具有良好的契合度。
目前,国内飞轮储能系统还处在实验研发和样机研制阶段,在工程应用中,多用于电力系统调频、风电等间歇式新能源发电、不间断电源、电气化铁路等领域[3],在城轨交通领域应用较少,对于城轨储能系统控制策略的研究还未深入。文献[4]考虑稳压节能及弱磁需求,提出基于多电压阈值的单飞轮储能系统控制策略。文献[5]为了提高系统动态性能,简化了电压-电流双闭环的控制结构,提出一种基于扩张观测器的直接电压控制策略。文献[6]在传统比例积分(proportional integral,PI)控制的基础上,建立基于电流前馈解耦控制的充电控制策略,并将滑模变结构控制器应用于飞轮系统放电控制策略中。
然而,飞轮单元在实际运行过程中会由于自身参数和运行环境差异导致转速不一致,交流中压环网的电压波动也有可能导致飞轮的误动作。文献[7]基于等微增率原则对飞轮单元充放电功率进行分配,在一定程度上抑制了转差,但是该方法的控制参数较多,且易受飞轮电机运行状态影响。文献[8]基于一致性算法提出了一种分布式协调控制策略,将多个飞轮单元构成多智能体系统,实现协调的功率分配方案,但是该控制方法需要多次迭代,控制过程存在计算量大且实时性较差的问题。文献[9]通过测量牵引变电所交流侧电压实时分析牵引网空载额定电压值,对充放电阈值进行调整。
本文以城市轨道交通飞轮储能系统为研究对象,提出一种基于牵引网直流侧网压的充放电控制策略,采用均速控制方法调节飞轮阵列因工艺与环境不同造成的转速差异,并在现有控制策略的基础上提出空载网压辨识算法,以避免中压环网电压波动造成的飞轮误动作。通过对含飞轮储能系统的牵引供电系统进行建模仿真分析和现场实验,验证了控制策略的可行性,为飞轮储能系统在城市轨道交通领域的进一步应用提供参考和借鉴。
1 飞轮储能系统的结构与控制
1.1 结构与拓扑
飞轮再生制动能量回收装置一般由飞轮转子、轴承、永磁同步电机、逆变器以及真空室等部件组成[10],其结构如图1 所示。

图1 飞轮储能装置结构Figure 1 Structure of flywheel energy storage device
转子是飞轮储能系统的储能媒介,飞轮转子的特性关系着飞轮的储能量。储能量E的计算公式为
式中,J为飞轮转子的转动惯量;ωr为飞轮转子的机械角速度。当飞轮充电时,永磁同步电机带动飞轮转子转速上升,电能转化为机械能;当飞轮放电时,飞轮转子带动电机发电,转子转速下降,将机械能转化为电能。
飞轮储能阵列的结构示意如图2 所示。图中,Udc为牵引网压,PMSM (permanent magnet synchronous motor)为飞轮储能装置中的永磁同步电机。本文所采用的飞轮储能阵列由3 个飞轮单元并联接入牵引接触网,提高了飞轮储能系统的储能量与充放电功率,在一定程度上满足了城轨列车再生制动能量的回收与牵引变电所输出削峰稳压需求。

图2 飞轮储能阵列结构示意Figure 2 Structural diagram of flywheel energy storage array
1.2 充放电控制策略
飞轮储能系统采用基于牵引网压Udc的充放电功率的控制策略。飞轮储能系统有充电、待机和放电3 种工作状态,根据牵引网压Udc的变化调整飞轮的工作状态。
飞轮的充放电功率上限P受牵引网压Udc控制的关系如图3 所示。图中,U1为飞轮全功率充电电压阈值,U2为牵引网的空载电压,U3为全功率放电电压阈值;Pn为飞轮储能设备额定电压,PL为飞轮进入待机状态时的初始功率,PM为飞轮待机状态下的最大功率;a、b为待机状态功率调整参数。当牵引网压Udc大于U2+a时,飞轮处于充电状态;Udc小于U2-a时,飞轮处于放电状态,Udc处于U2+a和U2-a之间时,飞轮则处于待机状态。

图3 飞轮功率上限P 与牵引网压Udc 的关系Figure 3 The relationship between the limit of flywheel power P and the traction network voltage Udc
列车制动时产生的再生制动能量使牵引网压Udc上升并大于空载电压U2,当差值大于a,即Udc>U2+a时,飞轮储能系统开始进入充电状态,充电功率上限P从0 开始随牵引网压的升高而逐渐增大,当Udc=U3时,飞轮达到充电功率上限,开始满功率充电。充电功率上限随牵引网压的变化率k1受U2+a和U3的共同影响。
列车牵引时吸收能量导致牵引网压Udc降低并小于空载电压U2,当差值大于a,即Udc<U2-a时,飞轮储能系统开始进入放电状态,放电功率上限P从0 开始随牵引网压的降低而逐渐增大,当Udc=U1时,飞轮达到放电功率上限,开始满功率放电。放电功率上限随牵引网压的变化率k2受U2+a和U1的共同影响。
当牵引网压Udc介于U2±a之间时,飞轮处于待机状态,在理想情况下,飞轮能保持当前转速。然而由于真空室并非绝对真空,只是为飞轮提供一个低风阻的运行环境,飞轮在旋转时,其轴承也会产生一定的损耗,飞轮的转速会因为自身的机械损耗而自由下降,若对此不加限制,可能会在需要放电时转速过低,甚至低于转速下限。故当Udc介于U2-a和U2+a之间时,飞轮小功率充放电以维持转速,使其转速处于一个稳定值。
当Udc=U2-a或Udc=U2+a时,待机状态功率上限P不是从0 开始逐渐增大,而是立刻以小功率PL为限制值接管飞轮控制,维持飞轮转速。当Udc=U2-a或Udc=U2+a时,飞轮待机状态的功率上限PL较小,并随着Udc升高至U2-b或降低至U2+b的过程中逐渐增大至PM。飞轮功率上限P的计算式为
1.3 飞轮阵列均速控制
在性能设计上,目前的控制策略已具备飞轮储能阵列控制功能。然而由于制造工艺有限,不同飞轮单元的实际参数不可能完全一致,运行环境也会存在一定差异,相同功率指令下的飞轮在运行一段时间后就会出现转速差异。飞轮间转速差异较大将严重影响飞轮储能阵列整体的输出功率,造成储能阵列容量的浪费。
本文在根据实时牵引网压Udc确定的相同飞轮功率命令的基础上,添加小功率的转速修正分量,生成个性化的多机功率命令,使飞轮功率存在微小的不同,以到达转速均衡的目的。
转速修正模块通过对各自的实时转速进行采集和计算,分别以3 个飞轮的实时转速n1、n2、n3为输入,以飞轮平均转速navg为反馈,将3 个飞轮转速环的输出P1′、P2′、P3′作为修正值,补偿到输出的功率命令值Pout上,生成各飞轮单元的单独命令P1*、P2*、P3*,均衡各飞轮单元的实时转速,实现多机并联下的能量分配管理。具体的均速控制框图如图4 所示。
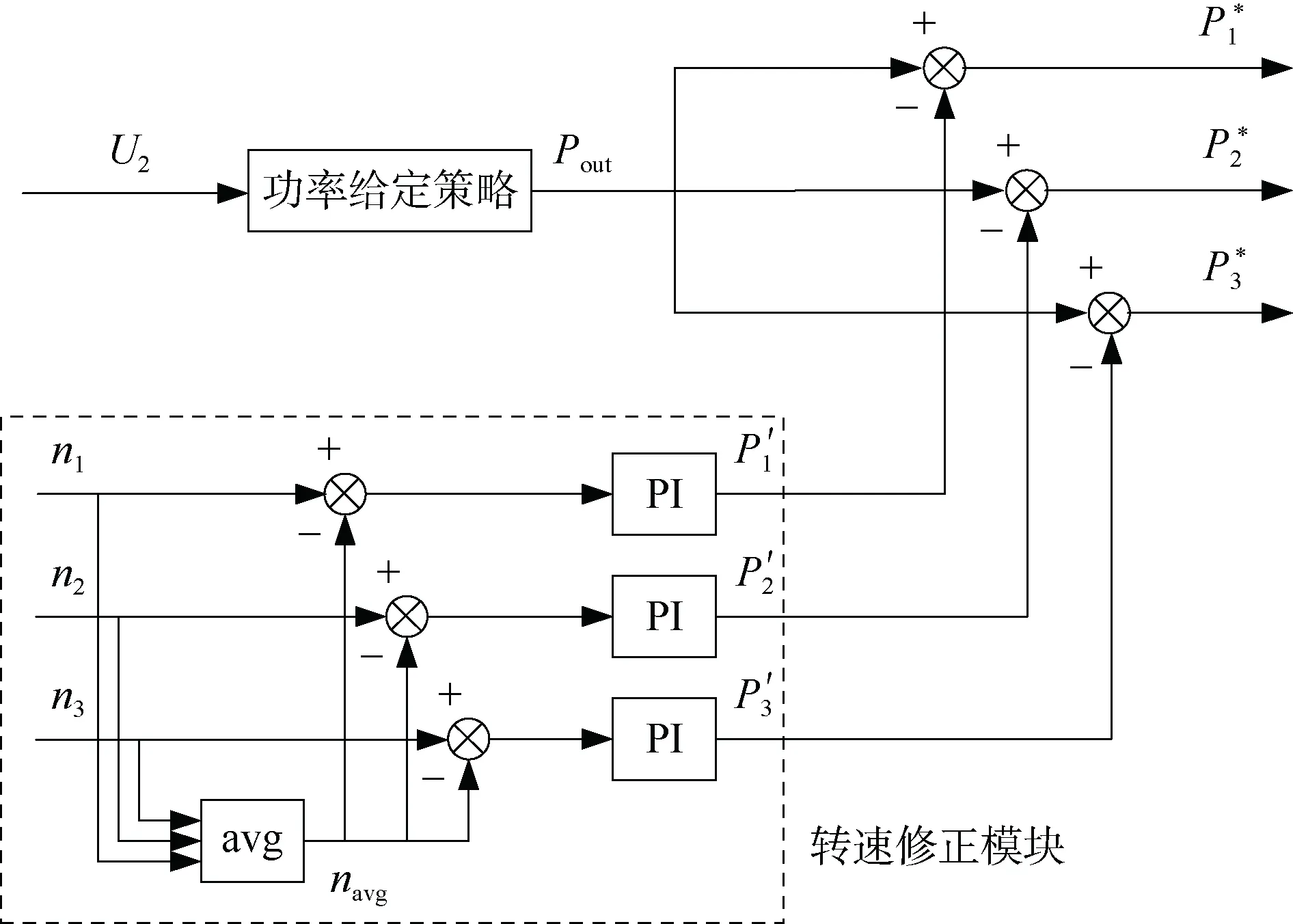
图4 均速控制方法框图Figure 4 Diagram of average speed control method
1.4 空载网压辨识
本文1.2 所述的充放电控制策略基本可以实现根据网压波动进行飞轮充放电控制,以达到对再生制动能量的回收利用和对网压波动的抑制目的。但在城轨牵引供电系统的实际运行过程中,除了列车运行会引起直流牵引网压波动之外,中压交流电网侧的波动也会引起直流网压波动,由于该网压波动为非列车引起,如不加以识别可能会引起飞轮储能系统误动作。
为了防止交流网压波动造成的飞轮储能系统误动作,充放电控制策略中的牵引网侧空载电压U2通常不是采用固定的额定值,而是测量牵引变电所输入侧中压环网电压电流实时信号,并在此基础上进行直流侧空载网压辨识,作为充放电阈值计算算法的基础。空载网压辨识算法的流程如图5 所示。
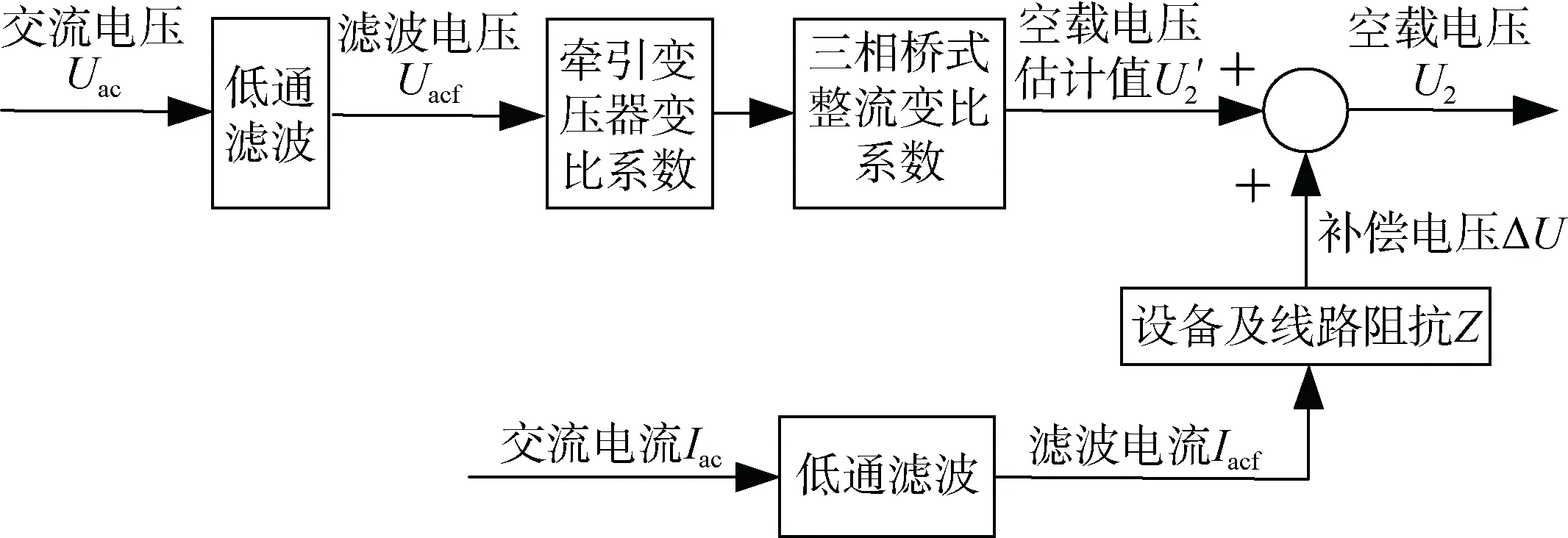
图5 空载网压辨识算法流程Figure 5 No-load network voltage identification algorithm
首先对中压交流网络的交流电压Uac进行采集,通过低通滤波滤除高次谐波得到Uacf,再结合牵引变压器以及整流机组的参数,计算得到直流侧空载网压的估计值U2′。采集交流电流Iac并滤波得到Iacf,通过变压器和线路阻抗Z计算补偿电压ΔU,以补偿变压器和线路阻抗产生的压降对空载网压的影响。空载网压辨识值U2即为直流网压估计值U2′与补偿量ΔU之和,即
空载网压辨识算法在实际运行中的结果如表1 所示。对比分析可知,在中压环网电压波动的情况下,空载网压辨识结果能够随电压波动自动调整,且辨识结果与直流侧电压传感器的采样值基本吻合,相对误差在0.7%以内,空载网压辨识算法能够有效地估计实际直流电压,降低交流侧电网波动的影响。

表1 空载电压辨识结果Table 1 Traction voltage recognition results under no-load operation condition
2 飞轮储能装置应用效果仿真
为验证飞轮储能装置控制策略的可行性,选取北京地铁房山线广阳城站为飞轮储能系统接入位置,对飞轮的工作效果进行仿真分析。广阳城站前后车站的布点关系与站间距离如图6 所示,其中,广阳城站距篱笆城站1 474 m,距良乡大学城北站2 003 m。

图6 广阳城站点关系Figure 6 Station relationship of Guangyangcheng station
采用基于MATLAB 自主开发的Revisor 软件进行仿真,建立含飞轮储能系统的城轨牵引供电系统及列车等效模型[11],仿真界面如图7 所示。

图7 牵引供电系统仿真界面Figure 7 Simulation interface of traction power supply system
房山线牵采用10 kV 分散供电方式,由沿线设置的AC 10 kV/DC 750 V 牵引变电所供电,共15 座牵引变电所,列车编组为4M2T,电机额定功率200 kW。采用4.5 min 的发车间隔和功率上限为1 MW 的飞轮,以1 s为仿真步长对牵引供电系统进行牵引计算和潮流计算,对比安装飞轮前后的变电所能量、功率和直流网侧电压变化情况。
在1 h 的循环周期内,未安装飞轮储能装置时,变电所输出能量为556 kWh,输出功率峰值为2.75 MW,直流侧牵引网压在700~900 V 之间波动。
在广阳城站接入功率为1 MW、容量为4.75 kWh的飞轮储能系统后,经仿真分析,变电所输出能量为417 kWh,较未安装飞轮储能装置时减少了25%,节能效果明显。
接入飞轮后,牵引变电所输出功率的峰值为1.8 MW,较未安装飞轮时降低了34.5%,飞轮有效抑制了牵引所的冲击功率波动,降低了牵引所的供电负担。安装飞轮前后的牵引所输出功率Ps随时间t变化的曲线如图8 所示。

图8 安装飞轮前后的牵引变电所功率曲线Figure 8 Power curve of traction substation before and after installing flywheel
接入飞轮后,牵引网压虽然仍在700~900 V 之间波动,但出现电压峰值的次数比未安装飞轮储能装置时减少了73%以上,飞轮储能系统有效地抑制了牵引网侧的电压波动。安装飞轮前后的牵引网侧电压波形如图9 所示。

图9 安装飞轮前后的牵引网电压曲线Figure 9 Voltage curve of traction network before and after installing flywheel
为了验证空载网压辨识的作用,模拟中压环网电压从10 kV 波动到10.2 kV 的情况,此时所识别的空载网压则从821 V 变为837 V,牵引网压Udc曲线如图10 所示。仿真结果表明,在其他仿真条件不变的情况下,中压环网电压波动2%,会使得整个牵引网空载电压提升约2%,但是对飞轮储能系统的运行无影响。
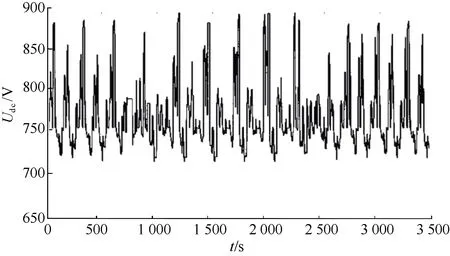
图10 10 kV 网压波动下牵引网电压曲线Figure 10 Voltage curve of traction network under 10kV network voltage fluctuation
3 飞轮储能系统现场实验
3.1 飞轮基本功能验证实验
为验证飞轮储能系统在列车牵引、制动过程中响应牵引网压波动进行充放电动作的及时性和准确性,将飞轮储能设备接入广阳城站,选取广阳城站前后两站篱笆城站至良乡大学城北站为测试区段,测试车辆在区间内往返运行,采用夜间动调测试。
经过测试,列车在启动、制动过程中,牵引网压和飞轮储能装置的总功率随时间变化的波形如图11所示。

图11 牵引网压和飞轮功率随时间变化的曲线Figure 11 Curves of traction network and flywheel power along with time
分析图11 中波形可知,飞轮储能系统可以根据控制策略及时准确地响应牵引网压波动,在牵引网压升高时吸收电能并在牵引网压降低时释放电能,夜间动调结果验证了飞轮型再生制动能量回收再利用装置与地铁牵引网的跟随性、匹配性以及设备运行的稳定性,飞轮储能装置具备了日间挂网条件。
3.2 飞轮储能系统效果分析
将飞轮储能系统在日间地铁正常运行时接入广阳城站,通过长时间挂网测试验证设备的稳定性和飞轮系统的节能效率、稳压效果。
3.2.1 节能效率
城轨牵引供电系统是一个多能源耦合的复杂系统,变电所、列车与飞轮间通过牵引网互相传递能量。牵引变电所输出能量可由列车运行消耗,也可以由飞轮储能系统转化为动能存储;列车再生制动能量可以由飞轮转化并存储,也可以直接为相邻列车所用;飞轮储能系统放电释放的能量则由列车运行消耗。三者互相耦合,共同决定牵引供电系统的能量流动特性。
为分析飞轮储能系统的节能效果,对日间挂网运行期间飞轮储能系统的运行数据进行了收集和统计分析,定义列车耗电量为飞轮系统节电量与牵引机组耗电量之和,则节能率为飞轮系统节电量占列车耗电量的百分比。在7 d 的挂网运行实验中,飞轮储能系统实际每天运行时间为6:00~22:00,日平均投运时间为16 h,该线路中广阳城站列车每日实际运行时间为5:20~23:30,约为18 h。7 d 日间挂网实验中的飞轮节能率统计结果如表2 所示。

表2 飞轮节能率统计结果Table 2 Statistical results of flywheel energy saving rate
分析数据可知,飞轮储能系统实际日节电量范围为1 130~1 380 kWh,节电率20%~29%,日平均节电量为1 292 kWh,日平均节电率为23%。飞轮储能系统的节电效果明显
3.2.2 稳压效果
除节能目的外,飞轮储能装置可以在列车制动时吸收再生制动能量以抑制牵引网压的抬升,在列车启动时释放电能以补偿网压的跌落,从而实现稳定网压的目的,飞轮储能装置投入前后的地铁运行期间牵引网压波动曲线如图12 所示。

图12 接入飞轮前后的牵引网压波形对比Figure 12 Comparison of traction network voltage before and after flywheel installation
通过对牵引系统投入飞轮前后的牵引网压数据进行对比得出结论:在未加装飞轮时,牵引网压最低为705 V,最高为928 V,电压最大差值为223 V,网压波动较严重;在投入1 MW 飞轮储能装置后,网压最低为751 V,最高为900 V,电压最大差值为149 V,降低了33.2%,牵引网压基本稳定在750~900 V 范围内,稳压效果明显。
3.3 飞轮阵列均速效果验证
为了防止因制造工艺影响造成的3 台飞轮转速差异,避免能量浪费,本文1.3 节给出的控制策略是在原有充放电控制策略的基础上进行了均速控制,分别在3 台飞轮的功率命令上添加小功率的转速修正分量,以达到转速均衡的目的。
在现场实验中,3 台飞轮功率及转速曲线如图13所示。在均速控制策略的协同控制与管理下,3 台飞轮的转速基本均衡,一致性较强,均速控制方法的工作效果良好。
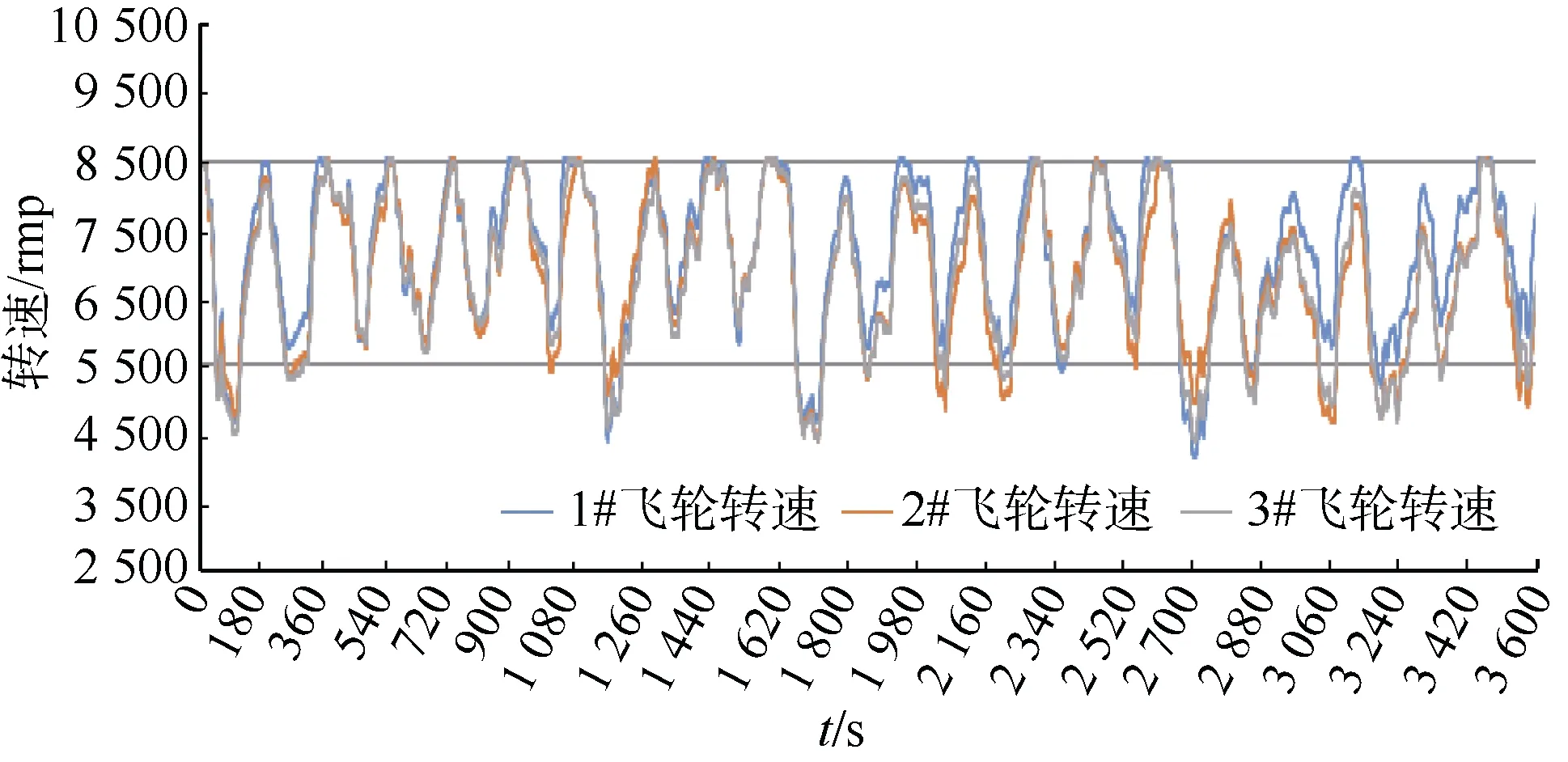
图13 3 台飞轮的转速曲线Figure 13 Speed curves of three flywheels
4 结论
针对应用于城市轨道交通的飞轮储能系统,本文提出基于牵引网直流侧网压的充放电控制策略、飞轮阵列均速控制方法和空载网压辨识方法,以应对列车频繁启动、制动造成的网压波动和能量浪费问题。
经过建模与仿真分析,接入飞轮后变电所输出能量较未安装飞轮储能装置前减少了25%,输出功率峰值降低了34.5%,出现电压峰值的次数减少了73%,飞轮有效地节约了能量,抑制了牵引网压波动。通过在北京地铁房山线广阳城站牵引变电所接入飞轮储能装置并进行现场实验,飞轮储能装置的节电率为23%,牵引网压波动降低了33.2%,进一步验证了控制策略的可行性和飞轮储能系统的稳压和节能效果。
猜你喜欢
新能源汽车供能技术(2021年1期)2021-10-14
控制与信息技术(2021年3期)2021-07-22
铁道机车车辆(2021年3期)2021-07-12
模具制造(2019年7期)2019-09-25
电子制作(2019年23期)2019-02-23
中国自行车(2017年11期)2017-04-04
电测与仪表(2016年12期)2016-04-11
中国现代医学杂志(2015年26期)2015-12-23
柴油机设计与制造(2015年3期)2015-12-05
电源技术(2015年5期)2015-08-22