基于高斯过程的压电驱动系统磁滞特性建模
2024-01-04 04:59黄鹏升
机械与电子 2023年12期
黄鹏升,丁 烨
(上海交通大学机械与动力工程学院,上海 200240)
0 引言
压电陶瓷由于分辨率与精确度高、输出力大和动态响应特性好等优势,被广泛应用于微小位移定位与驱动领域。但压电陶瓷驱动器的输出位移与输入电压间具有很强的磁滞非线性,使得对输出的精确控制成为应用过程中的主要难点[1-2]。基于磁滞模型的前馈补偿控制方法由于控制精度高、响应速度快等优势,获得了较为广泛的应用[3-4]。但其控制效果高度依赖基于磁滞模型的前馈,因此,精确的压电驱动器磁滞特性建模是进行精准控制的关键所在。
由于磁滞特性本身的机理较为复杂,难以根据物理机理建模,当前学界对磁滞特性的建模方法主要是描述磁滞回线形状的唯像模型,可以分为算子模型[5-7]、微分方程模型[8-10]及数据驱动的学习模型[11-13]。算子模型对磁滞特性的建模精度较高,但由于算子形状固定,对不同形式的磁滞特性辨识灵活度不足。微分方程模型则一般难以获得解析解,需要实时计算目标量,计算量较大。而数据驱动的学习模型很好地解决了上述问题,因此近年来开始受到广泛关注。其中,基于统计方法的学习模型由于超参数较少,灵活性较高,开始较多地用于此类磁滞特性的建模过程。Tao等[14]使用高斯过程方法直接对压电驱动系统的完整特性进行建模,获得了较好的模型拟合效果;Luo等[15]利用高斯过程方法对形状特性复杂的气动人工肌肉在固定输入信号频率下的磁滞特性进行建模,且无需对任何超参数进行调节;Xu等[16]则利用高斯混合模型对气动人工肌肉的磁滞进行建模,所获得的一阶动力学描述形式在用于控制的逆模型建立上非常有效。但实际系统完整特性同时与输入频率与幅值相关,现有建模方法中,同时考虑两特征的模型建模过程较为复杂,需要大量数据且容易出现过拟合现象;而仅考虑单一特征的模型则仅能应用于固定另一特征的条件,通用性不足。
本文在相关工作基础上,针对包含磁滞特性的压电驱动系统提出了一种新的率相关完整机电系统模型建模方法。通过引入率相关特性的描述,有效提高了模型的通用性。
1 压电驱动单元及其系统特性建模
本文研究对象为图 1所示压电驱动三自由度纳米定位平台中的压电驱动单元,其主要工作频率为0~50 Hz。每个单元同时包含了具有强磁滞非线性特性的压电陶瓷驱动器与作为运动副的柔性铰链结构,通过对压电驱动器输入控制电压u,可推动末端平台移动,单元中的位移传感器可以测得对应的位移l。为了对各驱动单元实现精准位置控制,首先建立描述各驱动单元输入-输出关系的机电特性模型。对系统输入不同频率与幅值的正弦信号u=A·sin(2π·f·t),l与u之间的相关关系分别如图2a与图2b所示。容易发现,系统的输入输出呈明显的非线性关系,且该关系同时与输入的频率与幅值相关。

图1 压电驱动定位平台及驱动单元

图3 压电驱动单元机电特性模型
对该系统机电特性的整体建模有多种方法,为了提高模型精度与便于控制器设计,本文采取将率相关特性与幅值相关特性分离的建模方法。综合当前学界研究现状[17-18],对压电驱动器本身的磁滞非线性特性可以做率无关假设,即压电驱动器输入与输出间的磁滞非线性关系仅与输入幅值相关,而并不受输入频率的变化影响;系统机电特性的率相关特征则主要是由于与压电驱动器耦合的机械系统线性特性导致。因此,系统整体机电特性模型可以描述为如图 3所示的Hammerstein形式,H[u]与G分别表示系统的磁滞非线性特性与线性特性,w是连接2部分的磁滞中间量。则对系统特性的建模可以分为2部分分别进行。
2 磁滞非线性特性建模
对如图 2a中所示的磁滞非线性,根据率无关假设,输出不受输入频率du/dt的影响,因此,磁滞特性可以表示为
(1)
由于输入信息可以直接获知,故对磁滞特性的建模仅需要描述输出随输入的一阶变化率,即
(2)
fin与fde分别为电压上升与下降段的磁滞特性,该映射关系可以通过统计建模的方式描述。
高斯过程(Gaussian process,GP)方法[19]作为一种数据驱动的概率模型,具有无需调节超参数、模型自由度高以及非线性描述能力强等优势,非常适合磁滞特性的统计建模。为简化表达,取如下变量,即
(3)
则式(2)的磁滞描述可表示为:η=f(x)。
高斯过程假设函数f(x)符合一个高斯分布,即
f(x)~GP(E[f(x),cov(x,x′))
(4)
E[f(x)为分布的均值;cov(x,x′)为分布的协方差函数,一般也被称为高斯过程的核函数,本文选取最为常用的高斯核函数,即
cov(x,x′)=
(5)
σ为高斯核的方差系数;L为尺度系数对角矩阵,在本文中阶数为2,需根据训练集辨识。
通过采样数据并以差分方式计算磁滞一阶变化率η,可以建立包含n组数据的训练集,即
(6)
由于实际采样过程中必然存在噪声扰动,因此假设训练集中的一阶变化率与磁滞映射f(x)间存在一个高斯噪声ε,即有
(7)
σn为高斯噪声的方差。则根据式(4),ηt应满足高斯分布,即
(8)
I为n维对角阵;E[f(Xt)为根据先验信息计算得到的均值,但由于缺乏对分布模型的先验,故均取为0;K(Xt,Xt)为根据核函数式(5)计算得到的Xt的协方差矩阵,有
K(Xt,Xt)=
(9)
根据该分布,可通过最大似然函数策略进行参数辨识。对训练集(6),对数似然函数为
(10)
取参数集合θ={σ,σn,l1,l2},l1、l2为L的对角元素。则对对数似然函数求参数θj的偏导为
(11)
Tr为矩阵的迹;α=K-1(Xt,Xt)ηt。由此,可以使用梯度下降等优化算法进行参数辨识。辨识过程中可能存在收敛到局部极值的情况,因此还可以结合遗传算法等启发式算法进行初值优化选取,获得更优的参数辨识结果,但相应的参数辨识时间也会大大增加。值得一提的是,参数辨识过程中并未对函数均值进行修正,这是由于高斯过程的拟合能力较强,仅依据协方差值已经可以较好地描述分布特性,因此无需单独辨识均值,预测过程中将均值也均取为0即可。

(12)

(13)
其中
(14)

(15)
因此,式(1)所表达的磁滞特性在实际计算过程中可以表达为如下的离散形式,根据当前时刻系统状态[wn-1un-1可实时计算给定输入电压下un的磁滞量输出wn为
(16)
另外,在训练集式(6)的获取过程中,磁滞中间量w无法直接测量得到。但当输入频率固定为一个低频率时,根据一般机械系统对应的线性特性可知,图 3中的线性特性G可以视为常数,即磁滞中间量w与位移输出l间呈正比例关系,只需要设出比例系数c1,则有w=c1·l。
3 机械系统线性特性建模
系统机电特性中线性部分由压电陶瓷驱动器的机械特性与柔性铰链部分的机械特性共同组成,难以通过机理模型进行精确建模,因此,采用有源自回归模型(auto-regressive with extra inputs,ARX)进行建模。对于本文系统的单输入单输出系统,ARX模型结构为
l(n)+a1l(n-1)+…+anal(n-na)=
b0w(n-nk)+…+bnbw(n-nk-nb)+e(t)
(17)
l(n)与w(n)为n时刻下系统的输出与输入;na、nb分别为系统极点与零点阶数;nk为系统的纯时间滞后项;e(n)为噪声干扰。对应的线性传递函数为
(18)

β=[a1…anab0…bnbT
(19)
式(17)可以等价地表示为
Lt=Xtβ
(20)
则可以直接计算待辨识参数集的最小二乘估计值,即
(21)
对给定的数据集,该组参数的拟合效果也可以通过归一化最小二乘误差衡量,即
(22)
在实际辨识过程中,系统的纯时间滞后项nk可以通过阶跃实验获取。但系统阶数无法获知,因此,仅确定一个可能的系统阶数范围,并在范围内进行遍历,通过式(22)的结果对拟合效果进行衡量,并最终选取最优拟合所对应的阶数为实际系统阶数。由于本文研究对象的主要工作频段为0~50 Hz,故系统模型亦仅需该频段内保持足够描述精度即可。由于此频段频率较低,一般不会激发高阶线性特性,故在辨识过程中,参考相关工作,给定系统阶数范围为na、nb∈[0,5。据此,完整的系统线性特性辨识流程如图4所示。

图4 系统线性特性辨识流程
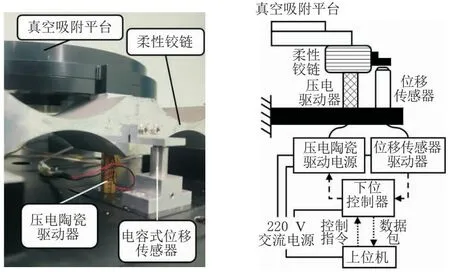
图5 驱动单元实物图与实验平台结构

图6 磁滞非线性特性预测效果
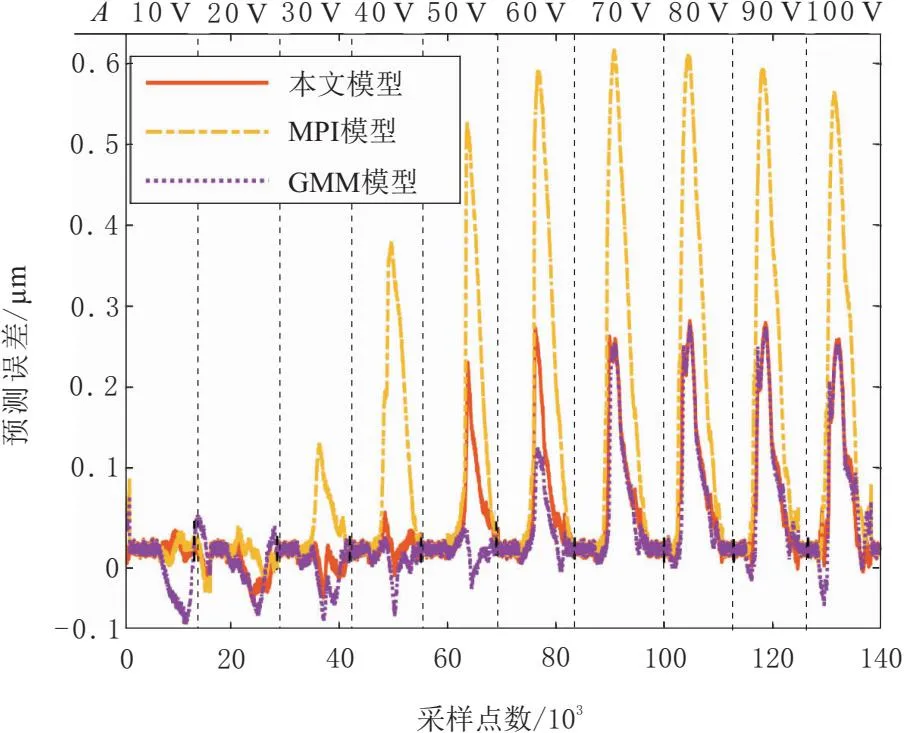
图7 磁滞非线性特性预测误差
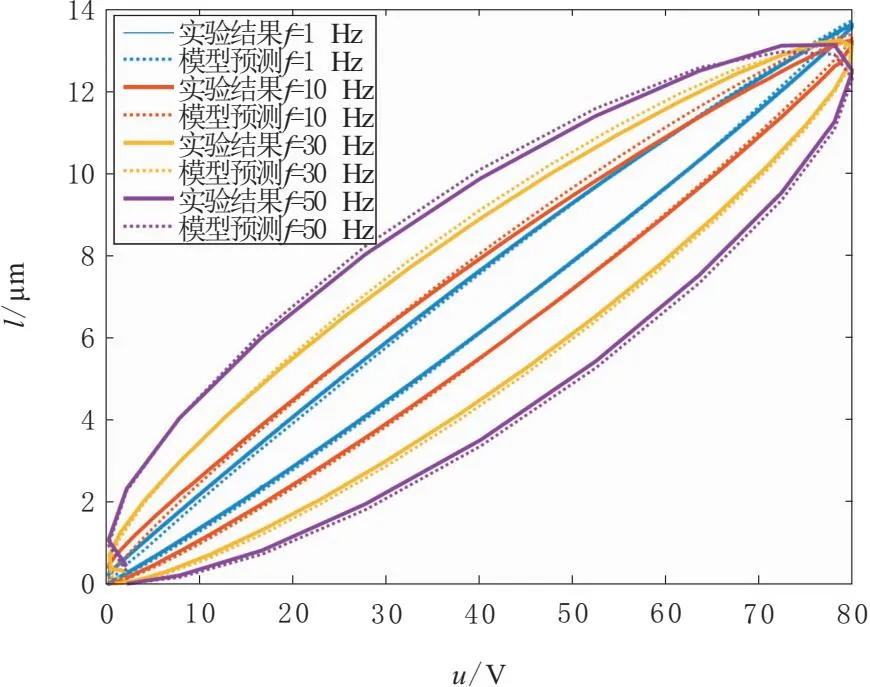
图8 系统完整输入-输出关系预测效果
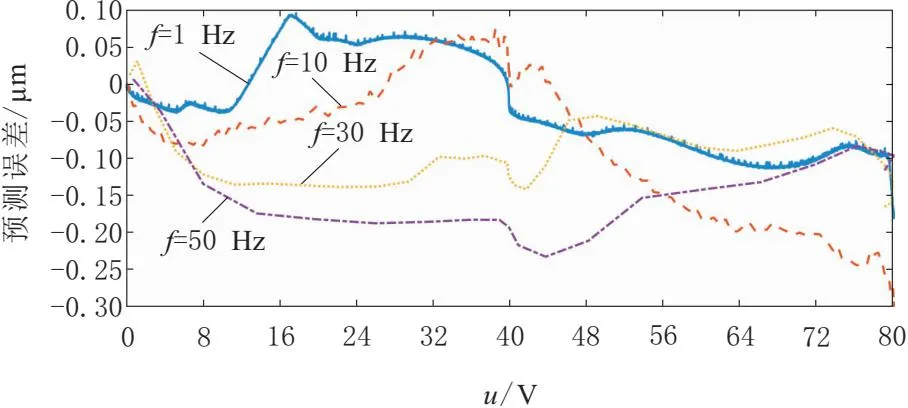
图9 系统完整输入-输出关系预测误差
对线性特性进行辨识时,训练集获取过程中同样无法直接通过测量得到迟滞中间量w。现有研究表明,当输入信号幅值较小时,系统磁滞特性基本可以忽略[20],磁滞中间量w与输入电压u间呈正比例关系,此时可设出比例系数c2,则有w=c2·u,据此可获得对应的训练集数据。
完成2部分特性辨识后,将磁滞部分描述模型与线性部分描述模型以图 3所示形式串联,可获得完整系统机电特性模型。根据串联后的模型输出幅值与实际输出的匹配关系,可以获得比例系数c1、c2间的相关关系,进一步通过给定其中一个参数的值获得另一个参数,即可得到实际系统模型。
4 压电驱动单元建模效果验证
通过上述方法采集训练集并对系统特性进行建模,并进行输出预测实验对建模效果进行验证。以图 1中的压电驱动单元B为例,该驱动单元的实物及结构如图 5所示。系统中所用压电驱动器为PI公司P-887.91型驱动器,位移传感器为Lion Precision公司CPL190微位移测量仪,下位控制器采用NI公司PXIe-6368X。
对模型建模精度的验证方法为比较相同输入下同一时刻实际系统位移输出l与模型预测输出lpred之间的吻合程度,并使用如下最大相对误差(relative maximum error,RME)对拟合效果进行量化表达,即
(23)
4.1 磁滞非线性特性建模实验
为了验证所提出的基于高斯过程的磁滞建模方法对于压电驱动单元率无关磁滞特性建模的有效性,选择一种主流的磁滞建模方法MPI(modified prandtl - ishlinskii)唯像模型[21]和一种基于高斯混合模型(GMM)的学习模型方法,对系统磁滞特性进行建模,并将建模结果与本文方法进行对比。其中GMM方法是与本文类似的统计建模方法。对相同的训练集数据,本文模型、GMM模型与MPI模型的参数辨识时间分别为568 s、615 s与3 416 s,相较于MPI模型,本文方法与GMM方法在参数辨识效率上具有明显优势。
设定中比例系数c1=1,此时低频下系统位移输出l=w。对系统输入频率固定为f= 0.1 Hz,幅值依次为A= 10 V、20 V、30 V、40 V、50 V、60 V、80 V、100 V的正弦输入信号。获得的输出预测结果与预测误差分别如图 6与图 7所示。容易现,当输入电压幅值较低时,3种模型的预测精度接近;当输入幅值升高时,本文模型与GMM模型的预测精度较为接近,但相对于MPI模型明显更高。该组测试集下,本文模型、GMM模型与MPI模型的预测RME分别为1.25%、1.22%与3.61%。容易发现,本文模型与GMM模型所代表的统计模型预测精度相较于传统算子方法更高,可以有效描述系统磁滞特性。
4.2 完整系统输入-输出模型建模实验
完整系统机电特性模型通过将实际辨识得到的2部分模型以如图 3所示形式串联得到。为了对线性部分的率相关特性建模效果进行验证,首先对系统输入幅值固定为A= 60 V,频率分别为f= 1 Hz、10 Hz、30 Hz、50 Hz的正弦输入信号。获得单个周期内的输出预测结果与预测误差分别如图 8与图 9所示。易见本文所提机电特性模型对不同输入频率下的输入-输出关系都具有较好的预测效果。对各组输入信号,预测误差RME分别为0.92%、2.04%、1.12%和1.88%,预测精度较高,对不同频率输入下系统的输出预测效果也较为一致。
此时,由于模型预设的限制,建模相对简单的学习模型已经无法对包含不同频率特征的机电系统特性进行建模。为了进一步验证本文方法的有效性,引入了2种对比模型对系统进行建模,分别是基于MPI磁滞模型的完整机电特性进行建模的模型[22]、以及利用高斯过程对同时包含频率相关特性与幅值相关特性的整体系统特性进行建模的学习模型[23],并与本文方法所获结果进行比较,2种方法分别称为对比方法1和对比方法2。其中,本文方法与对比方法1均在4.1节辨识模型基础上添加最小二乘得到的线性模型即可,仅需要多采集1组训练集数据并增加小于1 s的计算时间。但对对比模型2,需要采集覆盖全频段及全幅值段的数据,拟合所用数据量是本文方法与对比方法1的100倍,总训练时间则达到18 112 s,耗时极长。
对系统输入多组具有不同幅值与频率组合的正弦输入信号及覆盖1~70 Hz频段的扫频信号,对完整模型的输出预测效果进行验证获得的预测误差结果如表 1所示。容易见得,在给定的测试集下的本文模型的最大相对预测误差控制在2.06%以下,相较于基于MPI模型的改进方法,预测误差平均降低43%;而相较于对整体系统特性直接建模的高斯模型,本文方法的预测误差则略大,平均增大13%。
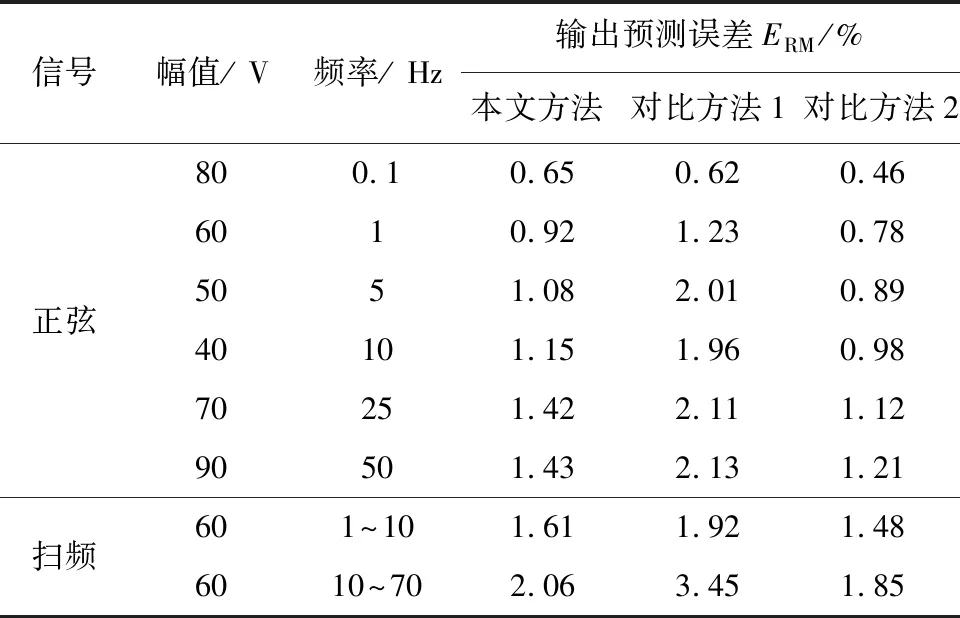
表1 完整系统模型输出预测误差
据此可以认为,本文所提完整机电系统建模方法可以有效描述系统在不同频率与幅值输入下的输入-输出相关关系,相较于传统算子方法,具有一定的精度优势。而相比于直接进行完整特性建模的学习方法,虽然精度略差,但其参数辨识效率与所需训练数据则具有极大优势,更加方便实际应用。
5 结束语
针对纳米定位平台系统中具有磁滞非线性特性的压电驱动单元,本文提出了一套完整的系统输入-输出非线性关系的机电特性描述模型建立与参数辨识方法。首先基于磁滞特性的率无关性质将驱动系统的磁滞特性与线性特性分离描述,实现2种特性的解耦。在此基础上,基于高斯过程方法建立了压电陶瓷驱动器输入电压与磁滞中间量间的磁滞关系一阶变化率描述,并导出了磁滞特性模型。所提方法具有参数辨识效率高,无需调节超参数,模型预测精度高等优势。同时,基于有源自回归模型建立了系统的线性特性描述,并给出了对应的参数辨识方法。通过系统输出预测实验,证明了本文所提磁滞建模方法与完整机电特性描述方法的有效性与优越性。本文方法相较于传统算子方法更为精准,与同类学习方法相比,则在模型参数辨识过程的简便性上具有显著优势,实用性更好。
猜你喜欢
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
压电与声光(2019年1期)2019-02-22
铜仁学院学报(2018年6期)2018-07-05
电子制作(2017年7期)2017-06-05
电测与仪表(2016年15期)2016-04-12
电源技术(2015年5期)2015-08-22
电测与仪表(2015年7期)2015-04-09
四川师范大学学报(自然科学版)(2015年2期)2015-02-28
振动、测试与诊断(2014年6期)2014-03-01