基于改进ESO的反馈线性化四旋翼无人机姿态控制
2024-01-04 05:10董洋洋夏泽群王永滨张子建
机械与电子 2023年12期
董洋洋,夏泽群,王永滨,2,张子建
(1.南京航空航天大学航天学院,江苏 南京 210016;2.北京空间机电研究所,北京 100194)
0 引言
近些年来,四旋翼无人机由于结构简单、操作方便、自由悬停和垂直起降等优点在监视、搜索、侦察以及其他一些社会和军事应用中得到了广泛的应用[1]。
由于四旋翼无人机的欠驱动特性,其位置控制是通过控制姿态角来实现的,因此,姿态稳定是四旋翼设计中首要解决的问题。针对四旋翼的姿态控制问题,学者们已经提出了许多有效的控制方法,如PID控制[2]、滑模控制[3]、几何控制[4]和反步控制[5]等。上述控制方法难以处理较大的扰动和建模误差(实际四旋翼无人机通常会受到这类问题的影响)。在存在未知扰动和建模误差的情况下,上述方法的控制性能可能会显著恶化,有时还会导致闭环系统不稳定。
自抗扰控制器是韩京清教授提出的一种无模型控制方法[6],其核心思想是将系统内部不确定性与外界扰动合并成“总扰动”,并将其作为系统的一个扩张状态,构造扩张状态观测器对其估计并在控制通路中抵消,目前已广泛应用于无人机飞行控制中。Zhang等[7]提出了一种双闭环ADRC无人机控制方案,在位置环和姿态环均采用ADRC控制,提高了系统的鲁棒性和抗干扰能力。Lotufo等[8]将ADRC与EMC(embedded model control)方法相结合,应用于四旋翼无人机的姿态控制,增强了ADRC的扰动抑制能力,实验证明了该方法的有效性。余小燕等[9]使用全局快速终端滑模技术(GFTSM)设计自抗扰控制中的非线性误差反馈率,提高了ADRC的响应速度和抗扰能力。Xiong等[10]将低频扰动补偿器(LFDC)与ESO结合,将总扰动的高频和低频分量分离,其中高频分量用于控制滑模控制器的增益,低频分量用于直接补偿扰动,进一步提高了扰动抑制效果。杨文齐等[11]构建了一种光滑galn函数,并用其替代了ESO中的fal函数,提高了控制器的抗干扰能力和鲁棒性。
无人机的传感器通常能够获取角度和角速度的测量信息,然而传统ESO仅能利用角度信息或角速度信息,对于测量信息的利用率不足。齐国元等[12]提出了一种补偿函数观测器(CFO),采用纯积分、补偿和传递函数型别的思想,改变了ESO结构,能够同时利用角速度和角度的测量信息,使得CFO较ESO高2个型别,精度高,收敛性强。赵旭等[13]在CFO基础上采用径向基(RBF)神经网络替代了线性滤波器,进一步提高了估计精度。然而,2种CFO结构均存在对测量噪声敏感的问题。同时文献[13]中采用小扰动假设,直接用姿态角速度代替欧拉角速度,带来了额外的系统误差。
对此,本文提出了一种基于改进ESO的无人机姿态自抗扰控制器。采用反馈线性化技术将无人机非线性模型线性化,避免了小扰动假设带来的系统误差。提出了一种改进ESO,其能同时利用角度和角速度的测量信息,具有更高的扰动估计精度。与文献[12]中的CFO不同的是,本文的改进ESO的扰动估计值与测量信息之间仅有积分环节,对测量噪声有很强的滤波作用,工程应用价值更高。最后,基于改进ESO完成了自抗扰控制器的设计和稳定性证明。通过数值仿真证明了本文所提控制器的抗干扰能力和鲁棒性均强于传统ADRC。
1 问题描述

(1)
式中,cψ=cosψ,cθ=cosθ,cφ=cosφ,sψ=sinψ,sθ=sinθ,sφ=sinφ,由式(1),无人机姿态运动学模型为
(2)
tθ=tan θ;ωb为无人机本体系下角速度。对式(2)求导,可以得到
(3)
根据欧拉方程,可以得到
(4)
d0为未知外部扰动;τ为无人机3个坐标轴方向上的控制力矩;J为无人机惯性矩阵。结合式(2)、式(3)和式(4),可以得到无人机姿态动力学模型为
(5)
其中
(6)
为了模型的有效性,本文中滚转角的幅值被限制在60°以内(60°在本研究中被认为是一个大角度,正常操纵四旋翼时无人机的滚转角远小于60°),此时A(χ)总是可逆的。
2 控制器设计
2.1 改进ESO设计
对于二阶系统,由
(7)

(8)

(9)

(10)
将式(10)对时间求导并将式(9)代入,可以得到
(11)
式(11)的特征方程为
λ3+β1λ2+β2λ+β3=0
(12)
从式(12)可以看出,本文提出改进ESO与3阶LESO具有相同的特征方程,因此,3阶LESO的参数整定和稳定性证明的结论可以直接应用到该改进ESO中。对式(11)做拉普拉斯变换,可以得到
(13)
从式(13)可以看出改进ESO对于常值和斜坡扰动渐进收敛,而LESO仅对于常值扰动渐进收敛。因此本文设计改进ESO具有比LESO更高的扰动估计精度。
2.2 基于改进ESO无人机姿态控制器设计

(14)

(15)

(16)

(17)
偏航通道控制器设计为
(18)
实际控制量τ计算式为
τ=BA-1(χ)u=
(19)
2.3 稳定性证明
引理1[14]:考虑如下非线性系统,即
(20)
定义V:[0,∞)×Rn→R是连续可微函数,满足:
α1(‖x‖)≤V≤α2(‖x‖)
(21)
∀‖x‖≥ρ(‖u‖)>0
(22)
∀f(t,x,u)∈[0,∞)×Rn×Rm,其中α1、α2为κ∞类函数,W3(x)为Rn上的连续正定函数;ρ为κ类函数。系统(20)是输入状态稳定的。
定理 1:对于系统(14),在满足集总扰动|d|的导数有界的条件下,则由式(14)~式(18)构成的闭环反馈系统相对于总扰动力的导数输入状态稳定。
将式(15)~式(18)和总扰动d的定义代入式(14)中,得到
(23)
以俯仰角通道为例,定义俯仰角跟踪误差和俯仰角速度跟踪误差为
(24)
定义俯仰角通道改进ESO估计误差为
(25)
令eφ=[ecφ,ezφ]T,其对时间求导有
(26)
其中,有
式(26)中系数矩阵Aφ的特征方程为
(27)
In×n为n阶单位矩阵。式(27)化简可得
(λ+ωφ1)2(λ+ωφ0)3=0
(28)

(29)
可以得到
(30)
该李雅普诺夫函数候选对时间求导有
(31)
总扰动d的导数的范数是有界的,不失一般性,假设其上界为q,选择合适选择优化常数γ∈(0,1),式(31)可化为
(32)
根据引理1可以得到,式(14)、式(15)和式(16)构成的闭环反馈系统相对于总扰动力的导数输入状态稳定。滚转通道和偏航通道证明同上。
3 仿真校验
3.1 观测器性能对比仿真
使用MATLAB/Simulink进行观测器性能对比仿真。仿真模型采用一个简单的2阶串联积分模型,模型如式(33)所示,即
(33)
f为仿真输入的扰动量;u0为控制量(这里主要进行观测器的性能对比仿真,不关注控制器,控制量可任取);x1、x2为状态量,均可测量。进行改进ESO、CFO和ESO的对比仿真。改进ESO和ESO均采用带宽法调参,带宽设为20。CFO调参方式参考文献[13],选择特征多项式中常数项与改进ESO一致,即l1=71.43,l2=755.92,λ=10.58。施加扰动f=sin(2t),无测量噪声的结果如图1所示。
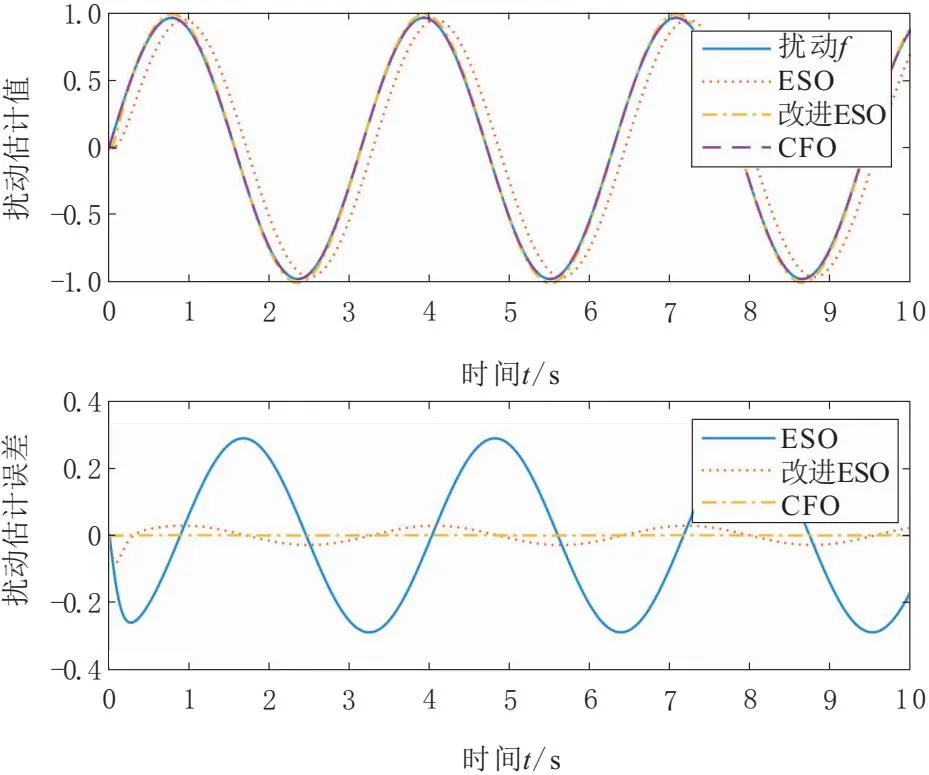
图1 无测量噪声时几种观测器效果对比
对反馈值施加采样频率为100 Hz,功率谱密度为10-9的白噪声,ESO与改进ESO的观测效果如图2所示,CFO的观测效果如图3所示。
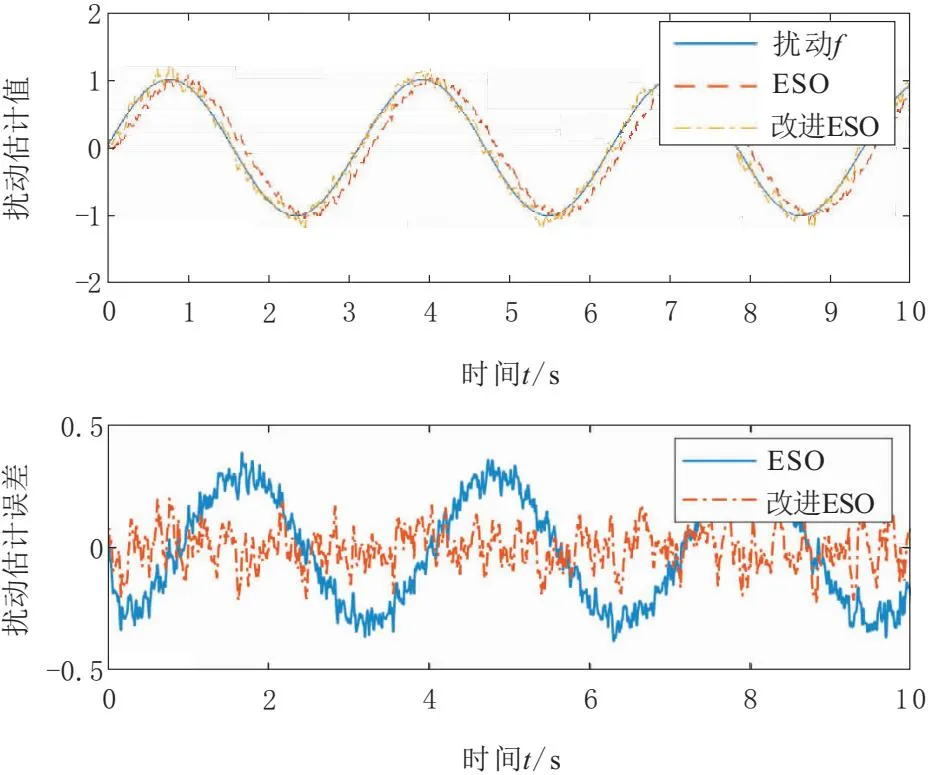
图2 存在测量噪声时ESO与改进ESO扰动估计效果
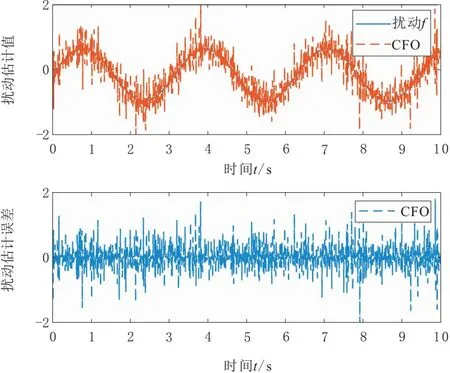
图3 存在测量噪声时CFO扰动估计效果
在没有测量噪声的情况下,ESO的平均绝对值误差为0.188 1,幅值为0.296 0;改进ESO的平均绝对值误差为0.020 2,幅值为0.029 6;CFO的平均绝对值误差为0.000 3,幅值为0.000 5。在存在测量噪声的情况下,ESO的平均绝对值误差为0.189 4,幅值为0.401 2;改进ESO的平均绝对值误差为0.062 7,幅值为0.270 4;CFO的平均绝对值误差为0.169 6,幅值为2.188 6。在没有测量噪声的情况下,本文所提出的改进ESO扰动估计误差是ESO的10.74%。在存在测量噪声的情况下,改进ESO扰动估计误差是ESO的33.10%,为CFO的36.97%。考虑测量噪声在工程应用中普遍存在,因此本文提出的改进ESO更具工程应用价值。
3.2 控制系统抗干扰能力对比仿真
将本文所提的改进ADRC与传统ADRC仿真进行对比,仿真采用的无人机动力学模型由式(2)和式(4)描述,惯性矩阵J为
仿真所设计的控制器和观测器的参数如表1所示。

表1 自抗扰控制器参数
无人机的俯仰角、滚转角期望设为幅值45°,频率为0.1 Hz的方波信号。偏航角期望设为幅值45°,周期为10 s的方波信号。在俯仰通道t=2 s开始加入幅值为0.1 N·m,占空比为40%的矩形波信号来模拟常值扰动。t=5 s在滚转通道开始加入0.1sin(2t) N·m的正弦信号模拟时变扰动,t=10 s在偏航通道也开始加入0.1sin(2t) N·m的正弦信号模拟时变扰动。
扰动作用下俯仰角跟踪效果如图4所示, 滚转和偏航角的跟踪效果分别如图5和图6所示。从图中可以看出,同样参数下,基于改进ESO的ADRC与传统ADRC在无扰动的情况下控制效果几乎一致。在常值扰动下,2种控制器跟踪误差均能收敛到0,但基于改进ESO的ADRC收敛速度明显快于传统ADRC。在时变扰动下,基于改进ESO的ADRC跟踪误差显著小于传统ADRC。
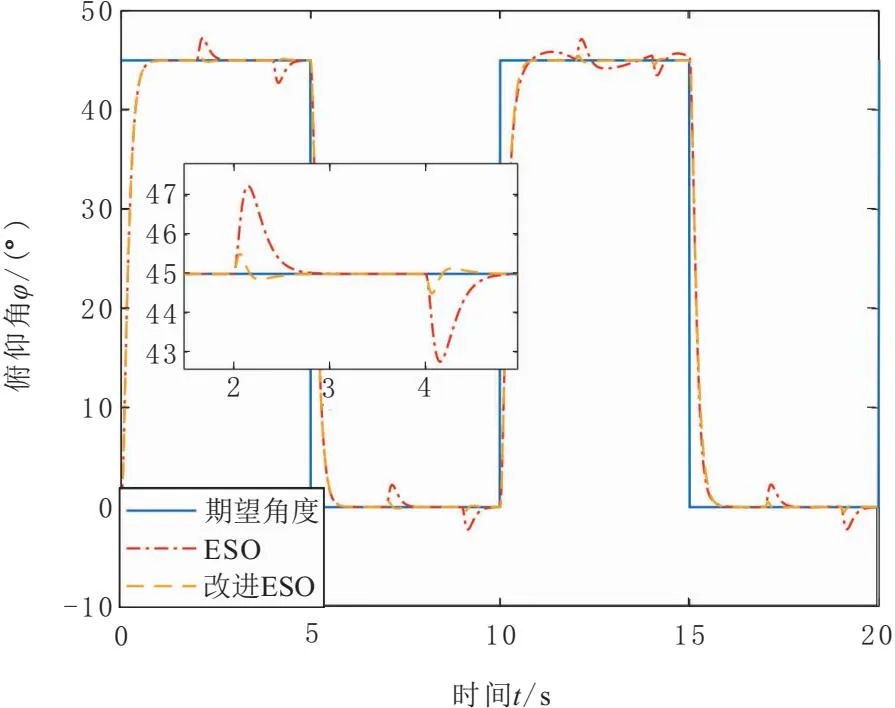
图4 扰动作用下俯仰角跟踪效果对比
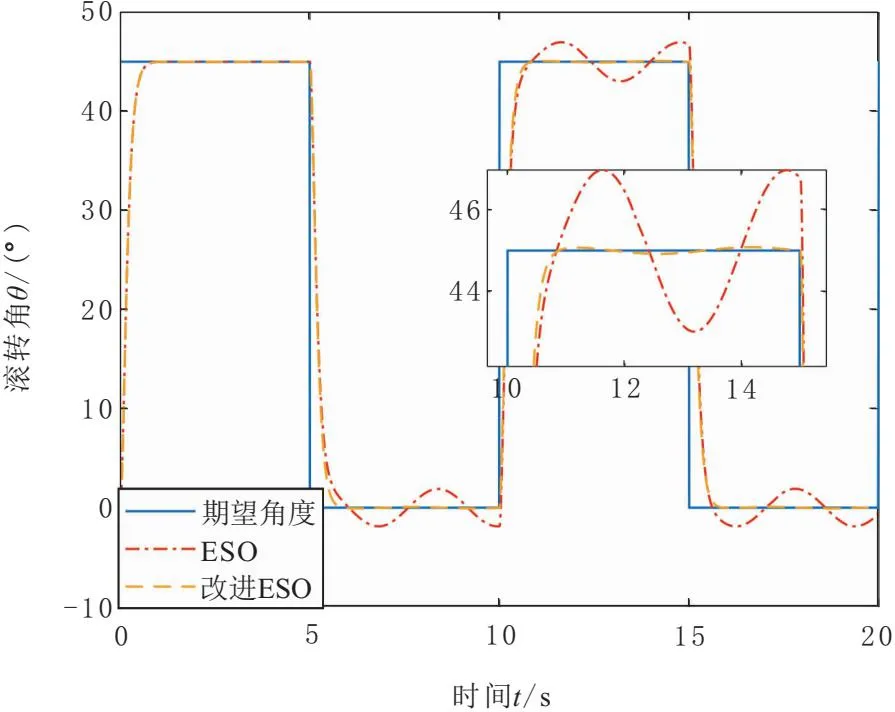
图5 扰动作用下滚转角跟踪效果对比

图6 扰动作用下偏航角跟踪效果对比
3.3 控制系统鲁棒性对比仿真
上面仿真中控制采用的惯性矩阵估计值B与无人机模型的惯性矩阵J相同,然而工程应用中可能得不到准确的模型参数。为了验证本文所提控制器在模型参数不确定情况下的性能,将无人机惯性矩阵J等比例放大,在不同放大倍数下分别使用ADRC与改进ADRC进行仿真校验。以俯仰通道为例,仿真其余参数与输入条件与3.2节中相同,不额外施加扰动,应用传统ESO的控制器跟踪效果如图7所示,应用改进ESO的控制器跟踪效果如图8所示。
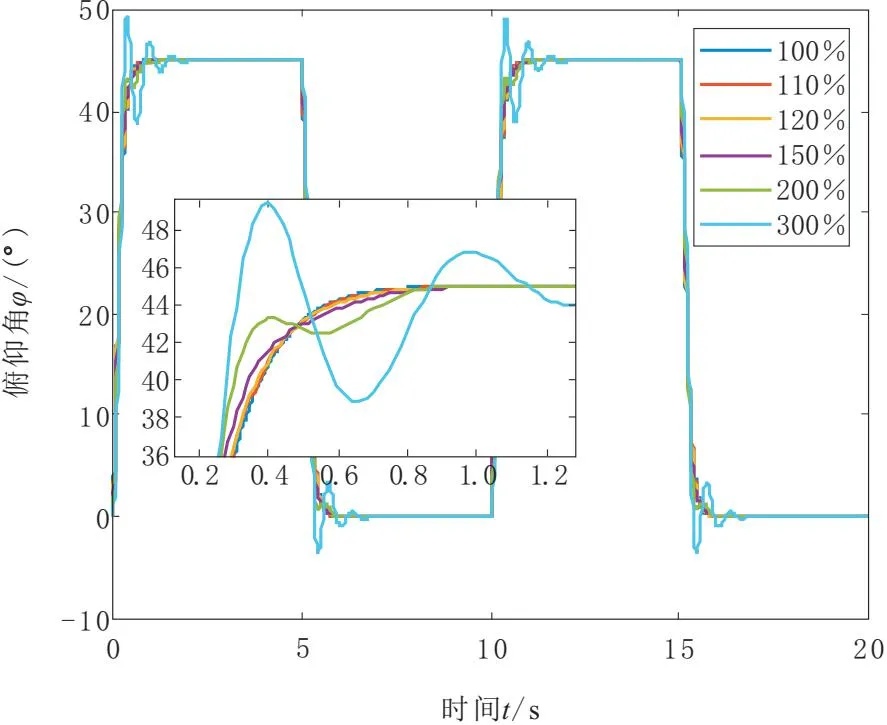
图7 传统ADRC控制器鲁棒性响应实验
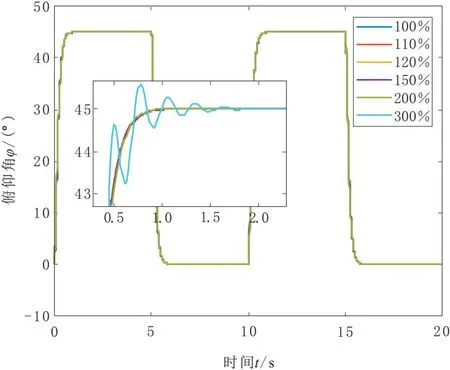
图8 基于改进ESO的ADRC控制器鲁棒性响应实验
对比图7和图8可以得出,基于改进ESO的ADRC控制器具有更强的鲁棒性。
4 结束语
本文研究了存在模型不确定和外界扰动情况下的四旋翼姿态控制问题。采用反馈线性化方法将四旋翼姿态动力学模型线性化,转化为串联积分型形式,在此基础上进行自抗扰控制器的设计。提出了一种改进ESO结构,其能够同时利用角度和角速度的测量信息来提高扰动估计精度。并应用MATLAB/Simulink对该控制方法进行了仿真实验,主要结论如下:
a.本文所提出的改进ESO在是否存在测量噪声的环境下扰动估计精度均高于传统ESO,在无测量噪声环境中改进ESO扰动估计误差为传统ESO的10.74%,在存在采样频率为100 Hz,功率谱密度为10-9的高斯噪声的环境下,改进ESO扰动估计误差为传统ESO的33.10%。
b.基于改进ESO设计的ADRC能更好地抑制外界扰动对无人机的影响,在存在外界扰动的情况下,本文控制方案的控制精度和收敛速度均高于传统ADRC。
c.基于改进ESO设计的ADRC的控制效果受模型参数变化的影响较小,相比于传统ADRC具有更强的鲁棒性。
目前本文的控制算法仅适用于二阶系统,在后续的研究中,笔者会将电机控制环加入到姿态控制环中。将本文算法扩展到高阶系统,来降低电机响应时间对闭环系统的影响,并应用于工程实践中。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
农业机械学报(2020年2期)2020-03-09
数学物理学报(2019年4期)2019-10-10
中华建设(2019年7期)2019-08-27
电子制作(2019年9期)2019-05-30
贵州师范学院学报(2016年3期)2016-12-01
北京航空航天大学学报(2016年8期)2016-11-16
项目管理技术(2016年12期)2016-06-15