基于传感器数据采集的接地刀闸机械位置检测
2024-01-04 05:00苏淑敏于树海梁元清
机械与电子 2023年12期
苏淑敏,杜 珂,于树海,梁元清,王 斌
(广西电网公司南宁供电局,广西 南宁 530000)
0 引言
近年来,接地刀闸机械在机械设备领域发展迅速,被广泛应用于电路高温检测[1]、设备维修等方面。随着科技水平的大力发展,人们对接地刀闸机械的位置检测方法提出了更高的要求,不仅要求位置检测精准度高,还要求其具有良好的抗噪能力[2]。其中的关键就是对接地刀闸机械的位置检测技术做出优化和改造。由实验证明和理论依据可知,研究接地刀闸机械的位置检测方法具有非常重要的现实意义。
程琳等[3]以接地刀闸垂直性开关为重点,采用非植入式矩阵检测模型,首先将接地刀闸垂直数据输入到模型中得到力矩-转角的关系式,然后分析转角的变换趋势和相对应的运动流程,最后将不同位置的接地刀闸运动流程与关系式结合,绘制成轨迹曲线,完成接地刀闸机械的位置检测。该方法没有对接地刀闸数据做出聚类处理,导致算法的检测时间过长。熊军林等[4]建立卷积神经网络模型,先以接地刀闸机械为中心采集图像,然后在图像区域中采取边缘检测和霍夫变换完成图像的边缘提取和直线检测,最后采用主成分分析法,得到接地刀闸机械的角度和间距,完成接地刀闸机械的位置检测。该方法没有利用结构支持向量机获取理想目标位置,导致位置检测效果差。李现坤等[5]利用光纤传感器采集接地刀闸机械数据,然后利用反向传播神经网络模型训练采集的数据,得到不同区域的位置变量。最后将位置变量与定位器变化量结合构建三维模型,得到接地刀闸机械的位置信息,完成接地刀闸机械的位置检测。该方法没有对数据做出降噪处理,导致位置检测结果受噪声影响大、抗噪能力弱。
为了解决上述方法中存在的问题,提出基于传感器数据采集的接地刀闸机械位置检测方法。
1 数据预处理
1.1 数据降噪
为了消除接地刀闸机械位置检测过程中传感器采集数据中存在的噪声干扰,通过混合型形态学滤波器对传感器采集的数据做出降噪[6]处理,具体步骤如下:
a.在接地刀闸机械的位置检测过程中,传感器采集的数据是关于机械状态的一维数据,所有基于形态学的滤波器可以针对一维数据做出滤波处理。将接地刀闸机械数据作为一种基础的离散函数序列[7],则数据的结构表达可以通过膨胀[8]和腐蚀计算得到,公式为
(1)
e为传感器采集的数据;n为传感器采集数据的数量;E为传感器采集数据集合;h为离散函数;m为离散系数;⊕为膨胀运算;⊙为腐蚀运算。
b.基于传感器数据采集的接地刀闸机械位置检测方法,经过膨胀和腐蚀运算后得到消除冗余信息的接地刀闸机械数据,然后通过数据的结构表达建立关于离散函数的形态开运算和闭运算公式为
(2)
·为形态开运算计算;*为形态闭运算计算。
c.在接地刀闸机械位置检测过程中,单独的形态开运算和闭运算会对数据的平均特征造成一定影响,所以采取混合型形态学滤波器将形态开运算与闭运算反复使用,即采用形态开-闭与形态闭-开相结合的形式,公式为
(3)
OC、CO分别为形态开-闭运算和形态闭-开运算。
d.基于传感器数据采集的接地刀闸机械位置检测方法,采用交替的混合型形态学滤波器对传感器采集的数据做降噪处理,滤波器的输出l(n)即为降噪后的接地刀闸机械数据,公式为
(4)
1.2 数据聚类
将改进k均值聚类算法引入到基于传感器数据采集的接地刀闸机械位置检测过程中,通过聚类处理[9]剔除差异较大的数据,流程如图1所示,具体步骤如下:
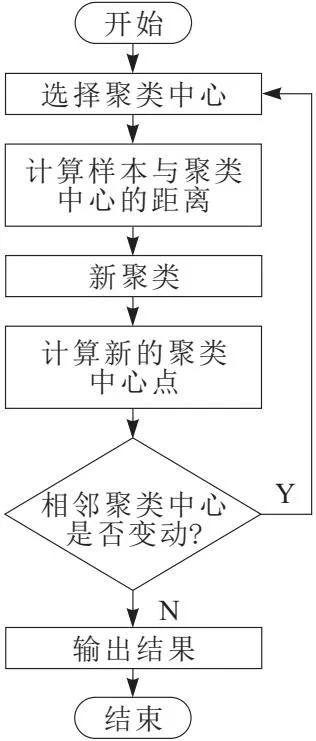
图1 数据聚类流程
a.将降噪后的接地刀闸机械数据l(n)作为待聚类处理的样本,从样本中任意选择若干个初始化的聚类中心,可表示为
(5)
ai、bi分别为第i个样本数据;D为待聚类的样本个数;F为初始聚类中心;s为聚类个数。
b.计算出剩余接地刀闸机械样本点与各个聚类中心点之间的距离d,并标记出与聚类中心点距离最短的接地刀闸机械样本点,将此样本点划分到新的聚类计算中。公式为
(6)
j为新的聚类。
c.基于传感器数据采集的接地刀闸机械位置检测方法,将所有的样本点都投入到新的聚类中,形成不同的聚类层次,其中任意聚类都包含原始的聚类中心、聚类点。然后利用式(7)计算每个聚类中心点,直到找出所有聚类的新聚类中心。
(7)
d.当任意2个相邻的聚类中心点不再产生变化时,即满足F′=F,表示完成最终聚类,得到基于传感器数据采集的接地刀闸机械聚类结果。否则返回步骤b继续计算。
2 结构支持向量机位置检测
基于传感器数据采集的接地刀闸机械位置检测方法,将预处理后的接地刀闸机械数据输入到结构支持向量机中寻找最优解,输出结果即为接地刀闸机械的位置检测结果,大致流程如图2所示。

图2 结构支持向量机位置检测流程
详细步骤如下:
a.利用结构支持向量机对接地刀闸机械位置检测时,目标是确定一个判决函数[10],可将它定义为度量与程度合并的函数。首先将预处理后的接地刀闸机械数据作为结构支持向量机的输入值,表达式为
v=argmaxG(u,v;α)
(8)
v为判决函数的最大化表达;G(u,v;α)为判决函数;u为输入量;α为程度系数。
b.基于传感器数据采集的接地刀闸机械位置检测过程中,假设在某一时刻,接地刀闸机械的位置可用特定矩阵[11]表示,那么位置检测的本质就是根据这个矩阵框形成的图像特征中找到最大化的判决函数作为向量机的输出值。根据式(9)计算出此时的目标位置。
(9)
Q为目标位置;t为当前时刻;p、q分别为矩阵框的长度和宽度;w为矩阵框的对角线长度。
c.得到接地刀闸机械的目标位置后,需要初始化结构支持向量机,自动训练传感器采集的数据样本。引入带有相似度量的重叠函数和距离函数,可以判断样本与目标位置的重叠程度和距离关系。重叠函数Hp(vt)与距离函数Cp(vt,vt-1)公式为
(10)
d.基于传感器数据采集的接地刀闸机械位置检测方法,根据样本与目标位置的重叠函数和距离函数可以确定二者之间的标记函数。标记函数[12]的作用是判断样本是否属于目标位置,其具体的表达式为
(11)
T为标记函数;η为相似度量的分界线。
e.在接地刀闸机械目标位置的区域范围内,重新利用传感器采集样本数据,并以式(11)为采样标准,当被采样样本与目标样本之间的重叠函数达到一定标准时,说明此样本就是包含目标位置的样本。
f.得到包含目标位置的样本后,基于传感器数据采集的接地刀闸机械位置检测方法,采用平面切算法在结构支持向量机中求取最优解[13]。首先将式(8)改进,得到新的最大化判决函数,即
(12)
g.根据结构支持向量机最大分类间隔原理[14],针对接地刀闸机械样本集,可以将式(12)转换成求取最优解公式,然后引入拉格朗日对偶函数[15],得到结构支持向量机的最优解,完成接地刀闸机械的位置检测。公式为
(13)
I为最优解;λ为惩罚因子;Δ为分类间隔变量;μ为拉格朗日对偶系数;Ω为损失函数。
3 实验与分析
为了验证基于传感器数据采集的接地刀闸机械位置检测方法的整体有效性,需要对其进行测试。
将位置检测时间、准确率、抗噪能力和位置检测效果作为指标,采用基于传感器数据采集的接地刀闸机械位置检测方法、文献[3]方法、文献[4]方法和文献[5]方法做出对比测试。
3.1 检测时间
采用本文方法、文献[3]方法和文献[4]方法检测15组接地刀闸机械位置,对比不同方法的检测时间。检测时间越长,说明效率越低;相反,检测时间越短,说明效率越高。不同方法的实验结果如表1所示。

表1 不同方法的位置检测时间
由表1可知,针对接地刀闸机械的位置检测,本文算法的检测时间在16 s附近波动,文献[3]算法和文献[4]算法的位置检测时间分别在28 s和35 s附近波动,通过对比发现,在不同实验中所提算法的位置检测时间均低于文献[3]算法和文献[4]算法的检测时间,本文算法的效率高。
3.2 检测准确率
将本文方法、文献[4]方法和文献[5]方法的准确率测试结果绘制成图,以便分析,如图3所示。
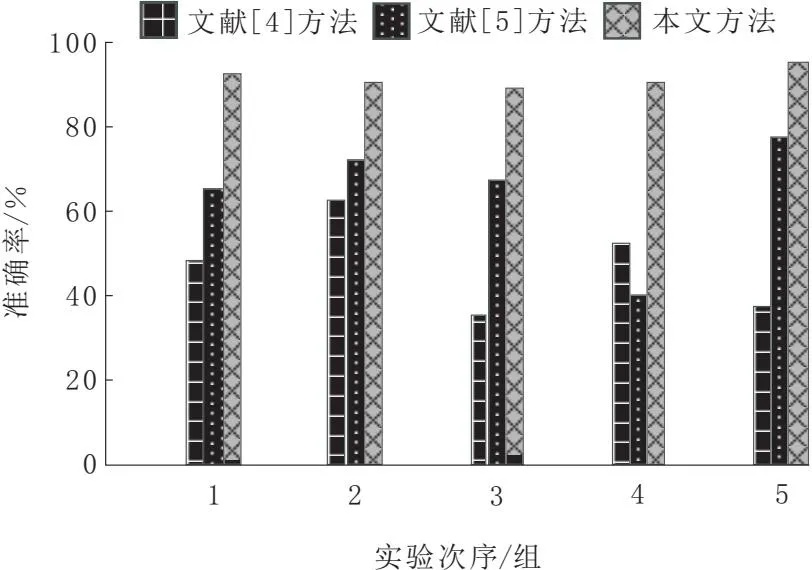
图3 不同方法的检测准确率
由图3可知,在5组实验中,本文方法的准确率均高于文献[4]方法和文献[5]方法检测准确率,并且随着实验次数的增加,本文方法的检测准确率比较稳定,没有发生明显波动,而文献[4]方法和文献[5]方法的检测准确率上下波动较大。
3.3 抗噪能力
将随机噪声加入到接地刀闸机械数据中,根据检测准确率的变化情况,对比本文方法、文献[4]方法和文献[5]方法的抗噪能力。3种方法的测试结果如图4所示。
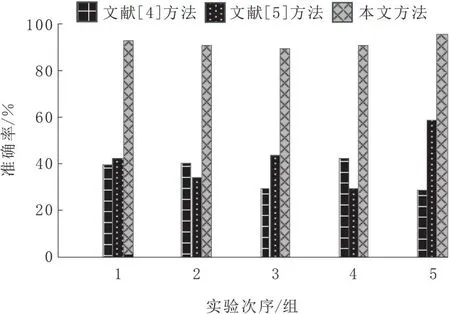
图4 加入噪声后的检测准确率
由图4可知,引入噪声后,本文方法的位置检测准确率没有发生变化,表明本文方法的位置检测结果不受噪声的影响;文献[4]方法和文献[5]方法的位置检测准确率在引入噪声后出现了不同程度的下降,表明文献[5]方法的识别结果受噪声的影响较大。本文方法在对接地刀闸机械位置检测前,利用混合型形态学滤波器对接地刀闸机械样本数据做出了降噪处理,进而在位置检测过程中不受噪声的影响,表明本文方法具有良好的抗噪能力。
3.4 位置检测效果
利用本文方法、文献[3]方法和文献[4]方法对图5a的接地刀闸机械图像实行目标位置检测测试,位置检测效果分别如图5b、图5c和图5d所示。

图5 位置检测效果
由图5可知,针对接地刀闸机械位置的检测,本文方法准确的检测出目标位置,而文献[3]方法的位置检测结果完全错误,文献[4]方法的位置检测结果区域偏大。说明针对接地刀闸机械的位置检测,本文方法的检测效果最好。
4 结束语
经测试发现,目前接地刀闸机械位置检测方法存在检测效率低、准确率低、抗噪能力差和检测效果差的问题,为此,提出基于传感器数据采集的接地刀闸机械位置检测方法。该方法首先对接地刀闸机械数据做出降噪和聚类处理,然后将预处理后的数据输入到结构支持向量机中,通过寻求最优解输出检测结果,完成接地刀闸机械的位置检测。提高了检测准确率、抗噪能力和位置检测效果的同时,降低了算法的检测时间。
猜你喜欢
科学技术创新(2021年14期)2021-05-28
健康之家(2021年19期)2021-05-23
医学食疗与健康(2021年27期)2021-05-13
农业科技与信息(2021年2期)2021-03-27
环球市场(2021年13期)2021-01-16
中国交通信息化(2018年5期)2018-08-21
电子测试(2017年15期)2017-12-18
雷达学报(2017年6期)2017-03-26
电子测试(2016年8期)2016-07-29
电网与清洁能源(2015年3期)2015-02-28