基于空地协同的山地冰川连续探测系统
2024-01-05 06:59钟继康赵品辉杨丽英何玉庆
无人系统技术 2023年6期
钟继康,李 鹏,赵品辉,杨丽英,何玉庆*
(1. 中国科学院沈阳自动化研究所机器人国家重点实验室,沈阳 110016;2. 中国科学院网络控制系统重点实验室,沈阳 110016;3. 中国科学院机器人与智能制造研究所,沈阳 110016;4. 中国科学院大学计算机科学与技术学院,北京 100049)
1 引 言
随着机器人技术的不断发展,多机器人协作系统因其诸多优点而成为机器人研究和应用领域的热点[1]。与执行重复性任务的传统机器人不同,协作机器人倾向于作为合作伙伴,在工作中相互合作。或者当人类处于安全的环境中,操作多个机器人以适应动态环境,在复杂危险的环境中完成多功能任务。在2011 年东日本大地震中,美国机器人辅助搜救中心与日本国际救援系统研究所利用多台机器人协同进行受害者救援和灾后环境测绘[2]。Tardioli 等[3]介绍了一种救援机器人团队,用于在采矿事故或隧道坍塌等受限和结构化环境中进行干预任务。
青藏高原及其周边地区被誉为“亚洲水塔”和世界“第三极”[4]。青藏高原东南部受印度季风的影响,是海洋(温带)冰川发育最重要和最集中的地区,是世界上仅次于极地冰盖的第二大冰川聚集地。近几十年来,世界各地的冰川都经历了重大的退缩和质量损失。冰川消融带来的灾害将对其下游流域的人口产生负面影响。作为亚洲十多条主要河流的摇篮,青藏高原也影响着地球上二十多亿人的社会经济活动。青藏高原冰川的相关研究引起了广泛关注[4-6]。机器人的辅助可以加速科学数据的收集,增加数据在时间和空间上的密度,因此利用机器人探索冰川是一种较好的冰川研究方案。Jouvet 等[7]使用垂直起降无人机来监测格陵兰西北部鲍登冰川的日常运动及其主羽流的动态,结合冰流模型或非稳定羽流模型,收集有关基岩深度、融水排放或潮汐冰川冰下融化速率的信息。Bash 等[8]使用无人机(Unmanned Arial Vehicle,UAV) 以及运动结构摄影测量(Structure from Motion,SFM)在新南威尔士州喷泉冰川消融区0.185km2的区域内进行了三次无人机成像任务,在努纳武特喷泉冰川消融区采集了图像用于确定分布的表面熔体,用于研究冰川表面融化与水流的关系[9]。Rohner[10]等使用UAV、差分GPS 和地面雷达干涉仪等手段收集了三个独立的冰川流量参考测量值,用于限制冰动力学模型以及对冰川质量的估计。Dąbski 等[11]使用固定翼无人机在超视距绘制了乔治王岛(南设得兰群岛)128号南极特别保护区生态冰川、斯芬克斯冰川和巴拉诺夫斯基冰川前缘的地貌组合,并推断了冰川动力学。Williams 等[12]利用基于视觉的里程计系统的传感器和无人车(Unmanned Ground Vehicle,UGV)的测量导航规则来重建感兴趣的科学区域,目的是监测冰川地区的海拔变化,并在阿拉斯加冰川进行了实验。Das 等[13]设计了一款轻型机器人车辆用于在无法支撑徒步旅行的冰壳上的裂缝进行探地雷达(Ground Penetraton Radar,GPR)调查,收集雪样本,并在对人类而言存在危险的地形上用透度计进行地下实验、雪崩碎片的GPS 测绘等。Williams 等[14]采用完全自主机器人,评估结合三种机器学习算法,利用GPR 进行冰川数据采集。虽然机器人辅助可以提高冰川数据收集效率,但是目前的UAV 只能用于获取冰川的表面参数。而UGV 由于其运动特性,多数只能在地形平坦、坡度平缓的场景中运行,无法胜任极复杂环境下的勘探任务。
本文以青藏高原廓琼岗日冰川为探测对象,提出一种基于空地协同的冰川探测系统。系统采用空地协同与人机协同的作业方式,同时搭载探冰雷达(Ice-penetrating Radar,IPR)和单目相机等探测载荷,完成了青藏高原廓琼岗日冰川大范围高密度地表环境和冰厚数据的采集。结果证明多机器人协作能够较好地完成高海拔冰川探测任务。基于空地协同的冰川探测系统为高原山地冰川研究提供了新方案。
本系统的测试场地廓琼岗日冰川海拔高度在5543~5933m 之间,冰川表面覆盖坚硬的冰面并且由于夏季融雪,冰川表面存在由冰雪融化形成的小溪,宽度从几厘米到几米不等。由于表面融水的存在,冰川表面十分光滑。冰川坡度最大为35°,平均坡度为25°,研究人员需穿着冰爪才可艰难爬升。针对青藏高原廓琼岗日冰川的表面环境,UGV的穿越探索任务主要面临以下挑战:
(1)冰川地形是典型的冰雪覆盖陡坡,可能会导致地面机器人侧滑、侧翻、动力不足;
(2)冰川表面覆盖的小溪,可能会给机器人探索造成潜在的陷阱;
(3)不同冰川区域、温度变化、天气突变等导致地形表面物理特征变化剧烈;
(4)冰川的高海拔、低温和大风等对UAV 和UGV工作性能的影响不可忽视。
事实上,在未知和极端条件下的导航和探索是科学机器人的十大挑战之一。此外,在崎岖的地形上驾驶对于UGV 来说也是一个很大的难题。本文目标则是通过复杂的多机器人系统,高效地获取密集的冰厚测量数据。
2 冰川探测系统架构
为此,设计了如图1所示的空地机器人探索系统,用以在冰川表面进行如下任务:

图1 系统架构概述Fig.1 System architecture overview
UAV 可以在高海拔冰川的低压、强风环境下飞行,并具备稳定的通信和视觉链接与跟踪能力,所搭载的单目摄像头在跟踪UGV 时负责实时记录UGV 状态。UGV 在视距外工作时,UAV 作为UGV与地面站(Ground Station,GS)之间的通信中继,保持通信稳定。
UGV 配备了四个履带式车轮,其车架设计保证UGV 可以适应冰川上覆盖雪、水和裂缝的地形。大容量油箱配合发电机的方式保证能源储备和功率输出。系统设计使UGV 在低温和高海拔环境中也能稳定工作。UGV 搭载的IPR 系统可以采集冰层厚度信息,建立冰川厚度模型。
GS 作为总指挥,在系统运行过程中根据环境状况与各分系统实时传回的状态数据指挥各系统的运行。GS 配备了组网电台用以对UAV 和UGV 进行通信,差分GPS 主要用以保障UAV 和UGV的定位精度,多台主机用来监视各平台状态。
在进行冰川探测任务时,UGV 首先探索视距内的冰川,在这段时间,GS与UGV之间由于没有山体遮挡,可以直接利用组网电台实现二者之间的点对点通信。操作员可以根据冰川环境和车载摄像机传回的图像来对UGV 下一步行动做出指示。当UGV 进入视距范围之外时,由于山体阻挡,通信中断,随后UAV 启动。UGV 将位置信息通过数传发送给UAV。UAV 根据UGV 的位置信息到达指定地点后,通过机载摄像机捕捉UGV 及周边环境影像,GS 通过UAV 搭载的组网电台与UGV 重新建立通信,并根据预先建立的冰川表层环境模型与机载摄像机传回的影像和UGV 状态信息,给出下一步行动指令,在此期间,UAV 作为GS 与UGV 之间的通信中继站,根据空地协同策略持续对UGV进行跟踪,保证通信稳定。
3 空地协同系统技术方案
本文设计的人机协同、空地协同系统能够适应极其复杂的高原山地冰川环境,实现高效的冰川探索。针对空地协同系统的特点和冰川研究任务,首先利用轻量化的冰川表面环境建模方法,获得最新的冰川表面环境数据,包括高程信息、地形地势等,为后续任务提供数据支持。然后,建立驾驶技能模型并构筑增量式学习方法,针对不同的冰川环境为驾驶员提供操作建议,并对车辆未来状况进行预测,在提高UGV 对山地冰川复杂环境适应性的同时使驾驶行为更加智能化。最后,提出的空地协同策略保证了UGV 在视距外工作时与GS 通信链路的稳定,进一步保障了系统在冰川探索时的安全与稳定。
本节将对上述方法进行介绍,由于冰川表面环境建模方法不是本文重点,所以只进行简要描述,更多细节请参阅文献[15]。
3.1 冰川表面环境建模
在冰川表面环境建模中,首先采用UAV 单光吊舱相机采集冰川表面图像数据,UGV 携带IPR采集冰层厚度数据。然后,使用SFM 和拼接技术生成曲面三维点云模型。随后,采用一种轻量级地形建模和预测框架,将点云模型转换成一个数据量更小的模型,同时不会造成严重的精度损失。该框架包括数据预处理、多分辨率高程滤波、地表划分和地形推断等步骤,较好地解决了现场非结构化环境建模面临的四个问题,具体如下:
(1)测距仪或相机收集的地形数据会因为传感器的噪声和机器人定位误差影响产生厘米级单位的误差;
(2)由于视角等原因,部分地形间隙被阻挡或未被观察到,导致数据不完整;
(3)在大尺度地形中,由于地形结构复杂,捕获的数据量大,导致计算量和内存消耗大;
(4)非结构化环境更复杂,具有地形梯度等多种属性,对地形适应性要求高。
而通过本文提出框架得到的全范围、准确和轻量级的3D模型可以为后续探测奠定如下基础:
(1)通过全局路径规划器的先验地图生成可行路径,为操作员提供路径参考,如图2(a)所示;
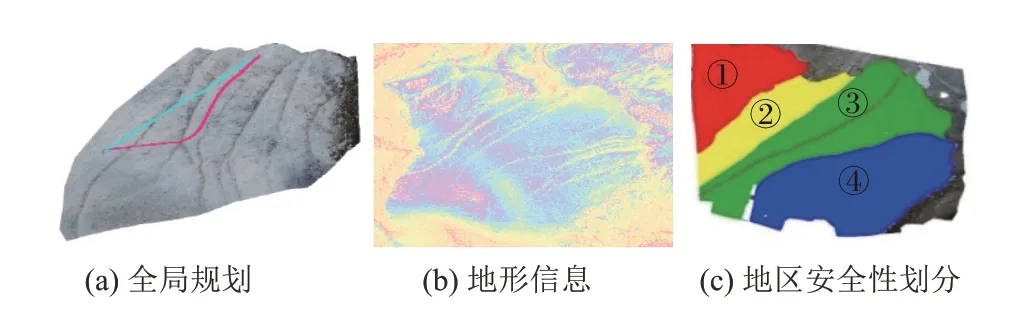
图2 轻量化建模结果Fig.2 Lightweight modeling results
(2)UAV 可以参考地形模型中的高程信息来调整空对地协同任务中的飞行高度,如图2(b)所示;
(3)提取作为增量式模型的输入特征之一的地形信息,如图2(c)所示。
3.2 驾驶技能学习方案及相关算法
在实际应用中,操作员只能通过UAV 传输的视频和地面车传回的状态数据在视距外干预UGV的行动。在这种情况下,UGV 无论是在自主模式还是在人工操作模式下想要在高原冰川的崎岖地形中进行探索都具有很大的挑战性。因此,本节中提出了一种UGV 驾驶技能建模方案。通过驾驶数据、车辆状态数据与地形数据之间的相关分析,建立简洁高效的驾驶技能模型。然后构筑增量式学习方法,使驾驶技能模型快速适应冰川环境和复杂地表结构。
数据形式可表示为{(Xt-n,…,Xt-1),Yt},其中输入和输出数据形式分别为
式中,Xt中的参数分别代表t时刻的地形信息、位置信息、姿态信息、驾驶信息、油门信息与预定目标信息。
设定kt(x)为t时刻的特征空间投影函数,Dt为t时刻的字典,t时刻的特征矩阵为Φt=[kt(X1),…,kt(Xt)]T。则驾驶技能模型为
式中,n为节点数,m是输出维度,ωi,j是从第i节点到第j输出的连接权重。驾驶技能模型可以根据环境信息以及车辆的状态给出推荐的操作并预测车辆未来状态。
首先利用相关性分析确定对驾驶技能模型较为关键的信息,建立高效精简的驾驶技能模型框架为
之后,以数据流模式在线增量式拓展模型。
具体实践中:当新数据到来时,利用近似线性相关(Approximate Linear Independence,ALD)准则判别当前模型对到来数据的线性相关近似程度。当近似程度大于设定阈值时,判别为旧模态,利用当前数据对模型进行微调优化。当近似程度小于设定阈值时,判别为新模态,会扩展模态维度并增加新的垂直基函数来适应新到来的数据对,因为新增加的基函数垂直于之前的旧维度,所以对之前的数据也会保留较好的拟合效果。
当输入是一个新的模态时,则通过增加模态字典St的长度来扩展模型结构,
式中,
算法1给出了驾驶技能学习方案的伪代码。
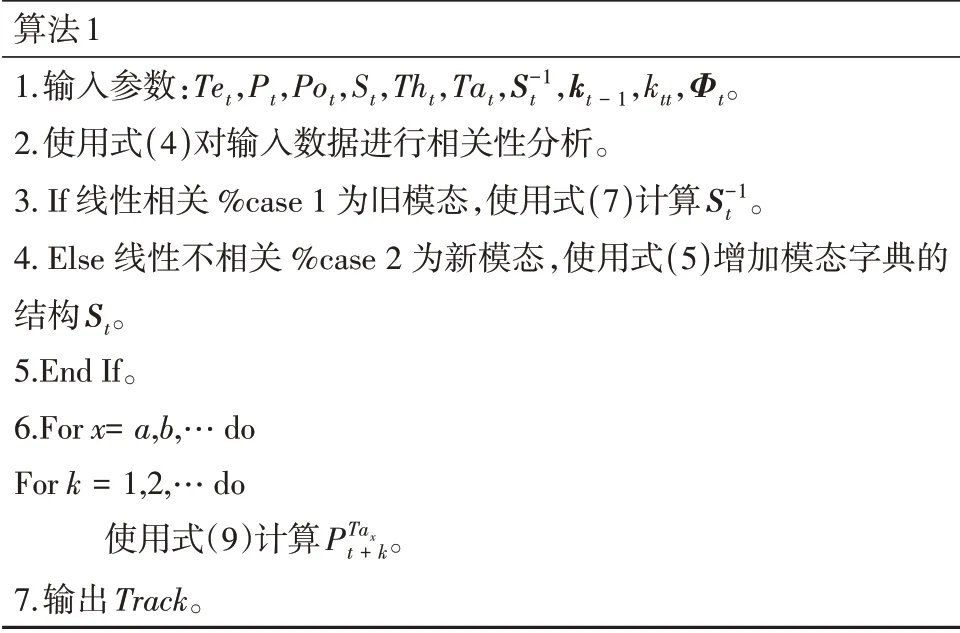
其中λ为L2 范数的权重,at为满足ALD 条件的系数,ktt=k(xt,xt)。
否则,对相关结构进行微调,使模型结构更加一般化,新参数可通过公式计算
式中,
然后建立迭代预测算法,将驾驶技能模型的一步预测结果返回到式(3)的输入中进行多步预测,为驾驶员提供合理的驾驶建议和可视化的未来车辆状况预测。该模型使用了t-n到t- 1时刻的历史数据序列(Xt-n,…,Xt-1)来预测车辆推荐的油门和转向值,以及t时刻的未来状态和位置信息Yt。
下一步,使用滑动窗口删除数据Xt-n,并将t时刻得数据Xt添加到队列的前面。将新的数据序列(Xt-n+1,…,Xt)输入模型,预测t+ 1 时刻Yt+1的值为
然后对后面的时间进行迭代预测,将预测到的位置连接形成预测轨迹,这个轨迹上的每个点就是由目标引导的t时刻的位置预测。
式中,t是预测时间,Taa是输入的目标点,PTaat是引导到Taa的路径上时刻t的预测位置。
进一步,在目标点附近选取多个备选目标点,将模型输入中的目标点替换,并以相同的方式进行迭代预测,获得多个备选预测轨迹
由此,可以结合冰川表面地形状况对轨迹的安全性进行判断,然后根据路径的平稳性和稳定性对路径进行综合评价,最后给出定量评价结果,将多个推荐路径融合为一个操作范围。如此,模型可以基于环境信息和UGV 的状态相应来给出驾驶建议参考。此外,模型还可以基于环境信息、车辆状态和实际操作来预测UGV 的未来状态。操作员可以根据这些信息来做出决策并实施控制车辆运行。本节仅对模型相关内容作概述性描述,更详细的建模细节内容请参考文献[16]。
3.3 空地协同方案及算法
在冰川探测工作中,需要UAV 与UGV 在感知层和行为层进行协作。感知层协作主要体现在冰川建模中,而行为层协作则体现在如下两个方面:
(1)UAV 需要保持对UGV 的跟踪并将摄像头捕获到的视频传回GS;
(2)在UGV 工作范围超出视距时,UAV 需要自主调节与GS 和UGV 之间的距离,保持通信畅通。
为了实现上述功能,本文将协同问题抽象为考虑UAV 机动性、无人机能耗、水平距离约束和视距(Line-of-Sight,LOS)约束的轨迹规划问题,如图3所示。
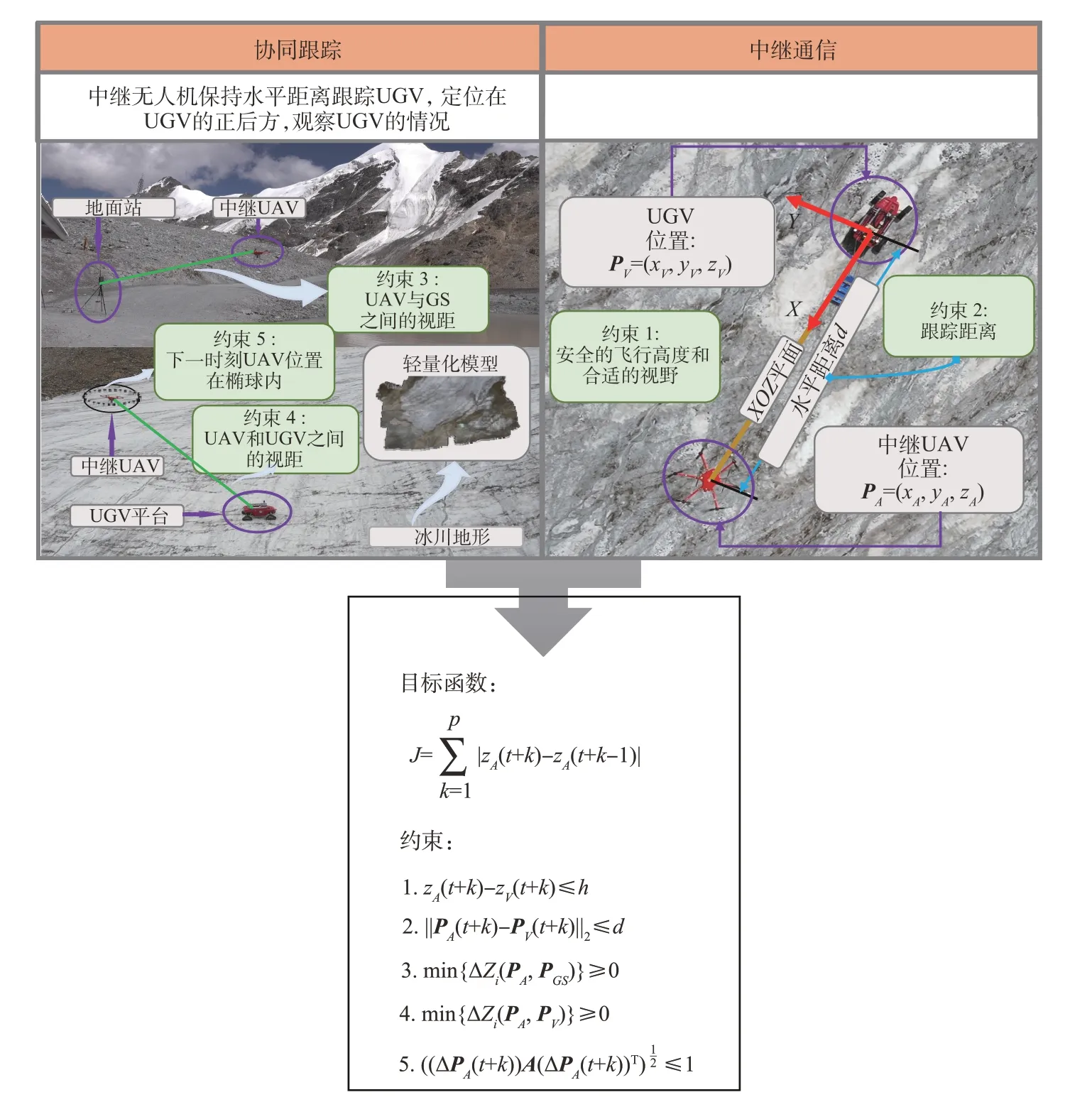
图3 协同策略Fig.3 Cooperative strategy
优化函数:考虑到UAV 在策略中的作用,在跟踪UGV 时需要保持与UGV 的距离,实时观察UGV 的状态。而作为中继站时,UAV 需通过调整自身飞行高度以保持GS 和UGV 之间的良好通信。而通常情况下更小的飞行高度意味着更小的能耗。因此,以UAV 的飞行高度为优化函数,并最小化UAV 的垂直飞行距离,其主要思想是在保持中继通信顺畅的同时,尽可能降低UAV 的功耗。优化函数定义为
式中,p是预测步骤,zA(t+k)是t+k时刻无人机的高度。
约束:LOS约束限制了UAV在UGV和GS之间构建LOS 链路,以保持平稳的通信,约束由下式给出:
式中,PA=(xA,yA,zA) 是UAV 的位置,PGS=(xGS,yGS,zGS)是GS 的位置,PV=(xV,yV,zV)是UGV 的位置。ΔZi(PA,PGS) =zi-f(xi,yi)是起于PGS终于PA的空间直线上的第i个点的高度差。在指定的间隔时间ds内取一个点,然后总共就有i个点,函数INT(·)表示十进制被删除并四舍五入到最接近的整数)。zi=zGS+为空间直线上的高度值,也为实际高程图中坐标对应的地表高程值。
水平距离约束用于确保UAV 始终跟踪UGV,以捕获并将视频传输给操作员,简化远程连接
式中,PA,h=(xA,yA),PV,h=(xV,yV),d为UAV与UGV之间的最大水平距离。
考虑UAV 的可操作性,使用椭圆球体约束如下:
式中,ΔPA(t+k)=PA(t+k)-PA(t+k-1),a,b,c代表UAV 在XYZ三个方向上以不同的最大速度飞行一步的距离,A=diag(a-1b-1c-1)为对角矩阵。
高度差约束限制了无人机的最小和最大飞行高度,以保证无人机在传输视频时的飞行安全和适当的视域:
式中,ΔzA(t+k) =zA(t+k) -zV(t+k)为最大垂直高度差。
在具体实践中,UGV 首先在驾驶员的操作下在冰川上进行任务。当UGV 驶入视距外时,由于地形的遮挡,驾驶员无法确定车辆状态与环境状况,并且遮挡会影响UGV 与地面站之间的通信。此时,使用UAV 作为中继站,在有地形遮挡的条件下保持通信畅通。通过UAV 与UGV 平台各自携带的差分GPS,UAV 能时刻根据UGV 的位置和冰川地表模型提供的高程信息来调整自己的位置。由此,空地协同系统可以借助人机、多机协同实现对复杂高原冰川的探索任务。
4 冰川探测系统实际验证与现场应用
如第2、3 节所述,本文设计并实现了一套基于空地协同的冰川探测系统,该系统能够适应复杂的高原山地及冰川环境,为验证本系统的能力,于2022 年6 月在西藏廓琼岗日冰川上进行现场实验验证与应用,图4为实验示意图。
全部实验分为三个部分,冰川环境建模、驾驶技能学习与多机协同策略验证。通过冰川环境建模,可以获得轻量化的模型,并为后续实验提供地形信息(包括高程信息、地表环境等)、区域安全度划分以及路径规划等结果。本节将重点介绍驾驶技能学习及多机协同策略的验证实验及相关结果分析。
4.1 驾驶技能学习方法验证与结果
如图4 所示,在驾驶技能学习中,在冰川地形数据的基础上,分析地形的复杂性,选择地形特征丰富的区域作为实验场地。让UGV 在区域中漫游,收集该地区的驾驶实验数据,并分析了各种模态数据的相关性,建立了驾驶技能模型,并进行了增量训练来对模型进行更新和调整。
为了验证模型的有效性,在复杂的冰川环境中选择了一个具有一定驾驶难度的区域,利用5个目标点来引导车辆通过具有不同模态特征的局部区域(如图5 所示)。首先使用驾驶技能模型生成多个候选轨迹,并产生可视化的驾驶操作建议范围。接下来对有模型建议和没有模型建议的两个巡逻任务的结果进行分析。
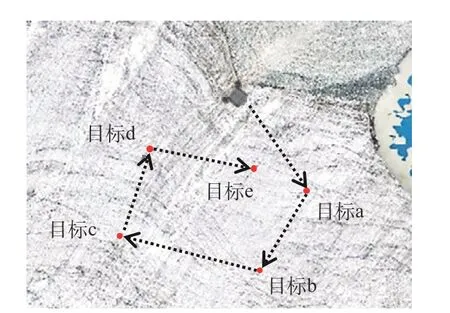
图5 驾驶技能模型实验方案Fig.5 Driving skill model experiment scheme
图6(a)为模型训练阶段的曲线,代表了增量训练的效果。如第3 节中描述,模型在新的数据到达时,对各模态数据进行相关性分析,并将数据投影到高位抽象模态。通过例如A 和B 点的数据,根据现有参数的拟合效果判断新数据是否对应一个新的模态。从拟合效果曲线和误差曲线可以看出,新的数据拟合效果差且误差增大,这说明该数据属于新模态。由此,使用新数据增加模型结构,扩充模态字典,最后,逐步完成增量训练。

图6 驾驶技能模型实验结果Fig.6 Experimental results of driving skill model
图6(b)为驾驶操作任务对比,该实验是在有/无模型建议情况下的巡逻实验。在该实验中,没有模型辅助的车辆中途失败,而有驾驶技能模型辅助的实验车辆成功完成了巡逻任务。通过收集和比较两次实验中的驾驶数据和模型建议,可以看出,失败实验中的实际驾驶操作与模型的建议产生了偏差,随着偏差的逐步增大,逐渐偏离了正确的方向,而成功任务中则没有这种偏差。造成这种情况有很多因素,例如在存在融水的冰川环境中,由于地面摩擦的减少,模型会根据环境变化给出增加横向减速来增加摩擦的建议。而在缺少该建议的情况下,车辆产生了打滑,最终导致任务失败。
4.2 空地协同策略验证与结果
图4 中第三部分区域实验,是对文中所提的空地协同策略的验证。在实验中,当UGV 行驶到超视距范围后,为了保证UGV 与GS 之间的良好通信,避免由于山地遮挡导致UGV 通信中断,中继UAV 开始工作。中继UAV 跟踪UGV 并保持距离,使用机载摄像机捕捉UGV 及周边环境图像后将图像传回地面站,并作为通信中继保持与GS和UGV 之间的通信。在UGV 运行时进行跟踪并自动调整其高度,以确保视频传输良好,通信完善。
首先,通过仿真确定了策略中的关键参数(预测步长p、最大高差h和最大水平距离d)的值。当预测步长p= 1 时,算法运行一个周期耗时0.834s,满足实时性要求;当最大高度差h=15 m,最大水平距离d= 10 m 时,无人机总飞行距离为400 m,能耗最小。
然后,在实际任务中,通过对比系统在应用协同策略和未应用协同策略时记录的UAV 跟踪误差以及UGV与GS之间的组网延迟,来检验协同策略的效果。如图7(a)所示,系统在160~550s 这段时间应用了协同策略,UAV 的各方向跟踪误差与未应用相比有显著改善。而对于图7(b),在未应用协同策略时,UGV与GS之间的连接中断,无法通信。
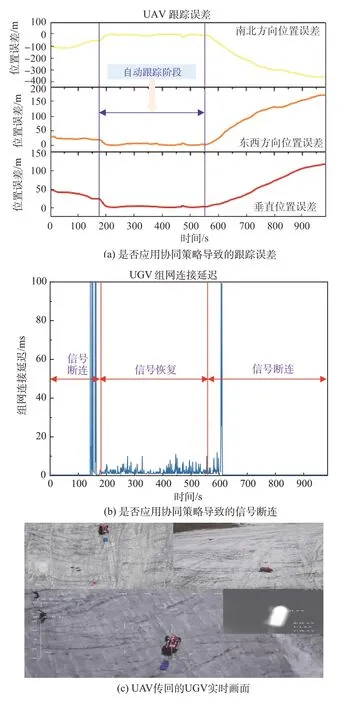
图7 协同策略实验结果Fig.7 Experimental results of collaborative strategy
4.3 冰川环境建模结果
对实验得到的原始IPR 数据(如图8(a)所示)进行处理,得到清晰的冰岩结构图像,并根据图像提取各测点的冰厚数据。然后,将每个测点的冰厚数据与GPS 数据结合,可以得到冰厚分布数据(如图8(b)所示)。接下来,将已有的冰厚数据使用高斯过程回归模型进行训练,并将新的冰厚数据进行插值,得到实验地区冰川的冰厚分布模型(如图8(c)所示)。最后,使用KDtree将轻量化冰川表面环境模型与冰厚模型进行匹配,得到完整的三维冰川模型(如图8 (d)所示)。
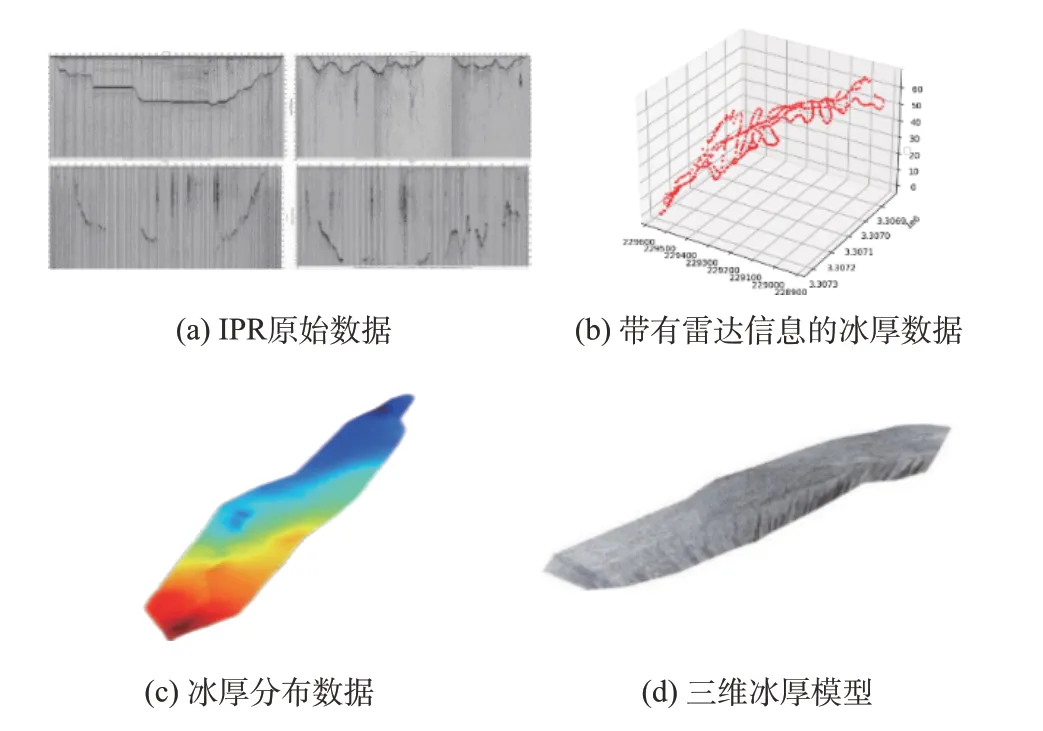
图8 冰川环境建模结果Fig.8 Modeling results of glacier environment
5 结 论
为了实现连续、高效、准确的冰厚分布和体积估算,本文设计并实现了基于UAV 和UGV 空地协同,并可以安全智能穿越极其复杂的高原和山地冰川环境的协同探测系统。空地协同策略有助于UGV 平台在冰川上进行大规模探测。驾驶技能模型为UGV 提供更安全、更可靠的驾驶建议,使冰川探险更安全、更智能。轻量级建模框架可以提供轻量级、精确的模型来模拟复杂、不准确的表面环境,为冰川研究提供了新的解决方案。
但是,本文所提方法仍然存在一定的局限性。首先,在极特殊区域,UGV的穿越能力难以确定;其次,由于高原山区地形复杂,风险性大,冰川探测系统仍需要不断的人为干预。未来的研究重点将集中在机器人的智能学习方法上,进而提高其对高原恶劣天气、复杂环境和特殊任务的适应能力。
猜你喜欢
科学大众(2020年23期)2021-01-18
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
小天使·四年级语数英综合(2020年2期)2020-02-04
创新作文(1-2年级)(2019年2期)2019-08-06
汽车观察(2019年2期)2019-03-15
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
金色少年(奇趣科普)(2017年12期)2017-12-26
中国卫生(2016年5期)2016-11-12
生物进化(2014年2期)2014-04-16