无人机-无人车空地无人集群系统多任务协同控制
2024-01-05 06:50王修业汪会明孙芹芹
无人系统技术 2023年6期
王修业,汪会明,孙芹芹
(1. 南京理工大学机械工程学院,南京 210018;2. 南京航空航天大学能源与动力学院,南京 210016)
1 引 言
随着多智能体技术、人工智能技术和通信网络技术的迅速完善和发展,无人机和无人车的应用也越来越广泛,如无人机环境侦察系统、无人机编队作战系统、无人车作战系统、无人车运输系统等[1-2]。为了将无人机和无人车应用于更复杂的场景,越来越多的研究人员致力于由多个无人机和无人车组成的空地无人集群系统控制的研究。该系统能够将无人机的侦察能力和无人车的重型运载能力结合起来,能够对情报收集、自主目标打击和协同搜救等任务的执行产生重大影响。因此,空地无人集群系统控制的研究具有重要的现实意义[3]。
空地协同、碰撞避免、不确定性处理是空地无人集群系统控制的三项重要控制任务。近年来,国内外众多学者对这三项控制任务的相关技术问题进行了研究。在空地协同控制方面,马亚杰等基于虚拟领航-跟随法的拓扑结构,提出了一种基于分布式自适应观测器的容错编队控制算法,实现了通信链路故障下多无人机-多无人车空地一体协同控制[4]。周思全等针对无人机-无人车异构系统时变编队控制与扰动抑制问题,设计了具有分层架构的分布式时变编队控制器[5]。朱旭等针对通信时延下的高维异构无人机-无人车混合编队控制系统,提出了系统稳定充分必要条件和时延边界计算方法[6]。在碰撞避免控制方面,尹凤仪等提出了一种基于改进人工势场法的多无人车编队路径规划方法,实现了无人车编队对障碍的避碰[7]。蔡泽等提出了一种基于深度强化学习的自动导引车避障方法[8]。Chen 等提出了一种基于微分同胚变换的避碰控制方法[9-15]。在不确定性处理方面,孙芹芹等提出了一种自适应有限时间容错控制方案,能够对系统中存在的不确定性进行有效抑制[16-18]。本文对空地协同不定义某一固定场景,而是将空地协同这一类控制任务抽象出来,进行控制设计的研究。
同时,针对具有不确定性的空地无人集群系统控制设计了一种多任务协同的自适应鲁棒控制方法。首先,根据多个控制任务分别建立相关的伺服约束。然后,建立约束跟随误差,将空地协同问题转化为一类近似约束跟随问题。最后,提出了一种自适应鲁棒控制方法,以驱动无人集群系统在存在不确定性的情况下仍能遵循约束条件,从而实现无人集群系统空地协同控制中跟随、避碰和不确定性抑制等多种控制任务。仿真结果表明,所提控制方法能够有效实现预期空地无人集群系统的控制目标,并具有良好的性能。
2 系统动力学模型及控制目标
考虑一个空地无人集群系统,包括N架无人机和一辆无人车。定义N={1,2,…,N}为无人机的序号集,Γ={N+ 1}是无人车的序号集,ℑ={1,2,…,N,N+ 1}为分配给所有无人单位(无人机和无人车)的序号集。在该系统中,无人机和无人车之间的相互作用和动力学是非常复杂的,需要复杂的控制策略来确保其相互协同和控制性能。令qi=[xi,yi,zi]T为无人单位在惯性坐标系中的位置坐标,τi=[τxi,τyi,τzi]T为控制输入,其中i∈ℑ。无人系统的动力学模型为[19]
式中,t∈R 为时间,σi∈Σi⊂RPi为不确定性参数, 代表无人集群系统的不确定性,Mi(qi,σi,t) >0 为惯性矩阵,Ci(qi,q̇i,σi,t)q̇i为 离 心 力 ,gi(qi(t),σi(t),t) 为 引 力 ,Fi(qi,q̇i,σi,t)为系统中的摩擦、空气阻力或其他外部扰动。无人集群系统中的函数均为连续函数。
本文针对空地无人集群系统的控制目标为:无人车进行跟踪目标轨迹,同时无人机群在运动时保持与无人车的期望距离,且不发生碰撞,如图1所示。因此,预期有四方面的性能:(1)无人机之间避免碰撞;(2)无人机与地面之间避免碰撞;(3)无人机跟踪无人车;(4)无人车轨迹跟踪。
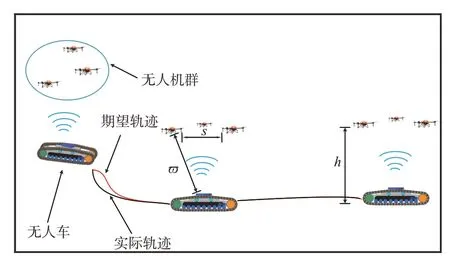
图1 空地无人集群系统控制示意图Fig.1 Schematic diagram of cross-domain control for airground unmanned swarm systems
3 空地协同问题约束跟随分析
3.1 控制问题描述
第一,考虑无人机在相互飞行时的避碰性能。定义函数
表征两架无人机k和j之间的距离关系,其中k,j∈N,k≠j,s>0表示无人机的最大半径。
定义 1. (无人机之间避免碰撞)对于任意安全初始条件(即dkj(t0)>0),在所有t>t0的情况下,dkj(t) >0。
第二,考虑无人机在飞行过程中与地面的避碰性能。定义函数
表征无人机k与地面之间的距离关系,其中hk>0是无人机与地面的最小安全距离。同时,定义无人车最高点到地面的距离为hc>0,且hk>hc。
定义 2. (无人机避免与地面碰撞)对于任何初始安全条件(即dkh(t0)>0),在所有t>t0情况下,dkh(t) >0。
注 1. 由于hk>hc,在定义2 的条件下,无人机能够避免与无人车相撞。
第三,考虑无人机与无人车之间的空地协同问题。定义函数
表征无人机k与无人车o之间的距离关系,基于距离关系,定义空地协同误差
式中,ϖko∈R表示无人机k和无人车o之间的期望距离。
定义 3. (无人机跟踪无人车)对于无人机k的任何初始状态qk(t0),存在时间Tk<∞,使得
式中,t≥Tk,ϑko>0是任意小的常量。
第四,考虑无人车的轨迹跟踪性能。定义轨迹跟踪误差
表征无人车o和期望轨迹之间的距离的误差,其中为目标轨迹。
定义 4. (无人车轨迹跟踪)对于无人车o的任何初始位置状态qo(t0),存在时间To<∞使得
式中,t≥To,ψ>0为无穷小常量。
3.2 约束跟随分析
第一,进行无人机相互间避碰约束的约束跟随分析。对于系统中的任意两个无人机k,j(k,j∈N,k≠j),定义
式中,dkj为式(2)显示的距离关系函数。将无人机k上的避碰约束构造为ėkj= 0,构造其二阶形式ëkj= 0。令
第二,进行无人机与地面避碰约束的约束跟随分析。定义误差函数
第三,进行无人机对无人车跟踪约束的约束跟随分析。构造无人机跟踪约束并求得其二阶形式
第四,进行无人车轨迹跟踪约束的约束跟随分析。构造无人车轨迹跟踪并求得其二阶形式
4 自适应鲁棒控制器设计
基于上述约束跟随分析,本节将四个不同的任务整合,并设计一个控制器同时完成四种控制任务,实现无人系统空地协同控制。首先进行约束整合,当i∈N时
当i∈Γ时
则每个无人单位i(i∈ℑ)的约束跟随误差可表示为
在不确定性方面,考虑空地协同控制中的复杂时变不确定性,包括系统本身不确定性、外界干扰、测量误差和初始状态等。此类不确定性时变有界,但界限未知,相比以往单纯的系统其不确定性更难控制。因此,为了便于后续进行不确定性估计,将和分解为
定理 1. 基于标称系统式(25) 和约束式(20),得到约束力为
该约束力遵循拉格朗日形式的达朗贝尔原理[20],使标称系统在模型已知和不存在不确定性的情况下满足约束条件。然而,在实际工程中,该模型在大多数情况下是未知的(即存在不确定性)。因此,当不确定性存在时,则需要对整个不确定系统进行更全面的控制设计,令
假设1. (1) 存在一个未知的常数向量αi∈(0,∞)ki,以及一个已知函数Πi(·,qi,q̇i,t):(0,∞)ki× Rn× Rn× R →R+,对任意σi∈Σi有
(2) 对任意(qi,q̇i,t) ∈Rn× Rn× R,函数Πi(·,qi,q̇i,t): (0,∞)ki→R+有以下性质:(i) 一阶连续可导;(ii) 函数Πi为凹函数,且对任意αi1,αi2∈(0,∞ki)有
(3)函数Πi相对于其自变量αi的每一个分量都是不递减的。由于ρiE>-1,因此 1 +ρiE>0。Πi(·)与不确定性的边界有关。常数向量αi与边界集合Σi有关,因此也可能是未知的。
在假设1. (2)的一种特殊情况下,函数Πi(·)可以对常数向量αi进行线性分解,即存在函数使得
这为选择满足假设1. (2)要求的Πi(·)提供了一种简单可靠的方法。
式中,κi为设计参数,Pi∈Rm×m为设计矩阵,γi(·)为控制设计函数,Πi(·)为不确定性边界函数[15]。定义自适应律
注2. 在本控制方法中,pi1用于确保受控系统的标称部分紧密遵循约束,pi2使得系统状态迅速接近期望值,pi3用于使得系统在存在不确定性的情况下,控制τi具有良好的鲁棒性,以减少不确定性对系统性能的影响。
证明:为验证定理2,选取函数
为合理的李雅普诺夫备选函数。其导函数为
接下来进行单独分析,首先分析式(36)右端第一项
当系统中不存在不确定性,即σi≡0 时,ΔMi= ΔCi= Δgi= ΔFi= 0,Qci=pi1,且
根据式(28)得
根据式(31)得
由于ΔDi=DiEi,结合式(32)可得
根据假设1及瑞利原理可得
联立式(43)及式(44)可得
然后,根据假设1. (2)可得
将式(50) 代入式(48),并联立式(49)可得
因此
式中,
基于以上分析,定理2 所描述的系统性质成立,具体表现为
(1)一致有界性
(2)一致最终有界性
式中,
因为函数γi是严格递增的,因此通过调整控制器参数κi,,εi可以选择任意小的。至此,基于以上分析,证明所设计的约束跟随控制方法能够使得受控空地无人协同系统达到预期的跟踪和避碰性能。
5 仿真结果及分析
为了进一步验证所提控制方法的性能水平,本节在仿真过程中将所提出的自适应鲁棒控制与线性二次型调节器(Linear Quadratic Regulator,LQR)控制进行比较。选取仿真参数m1,2,3,4= 10,s= 0.25,h1,2,3= 0.2,ϖ14,24,34= 4,l14,24,34=3.6,l4= 3.6,g1,2,3,4= 9.81,κ1,2,3,4= 15,P1,2,3,4= 0.8,,,k1= 0.1,k2= 1.2。选择1 倍不确定的大小为(1倍描述为 1x, 100 倍描述为 100x)Fi=[0.1sin10t, 0.1sin10t, 0.1sin10t]T以及初始状态q1(0) =[0,2,2.8]T,q2(0) =[-1,1,3.3]T,q3(0) =[1,0,2.5]T,q4(0) =[1,0,0]T,。仿真参数的选用原则为:(1)无人机不处于危险碰撞状态,即无人机之间保持安全的距离;(2)为了验证在系统初始状态不处于目标约束下时控制器的控制性能,无人车的初始位置选择在目标轨迹上;(3)无人机与无人车初始距离不处于目标距离内;(4)为大于0的随机值;(5)不确定性符合时变、有界等特性。上述两种控制器在不同不确定性干扰下的比较结果如图2~9所示。
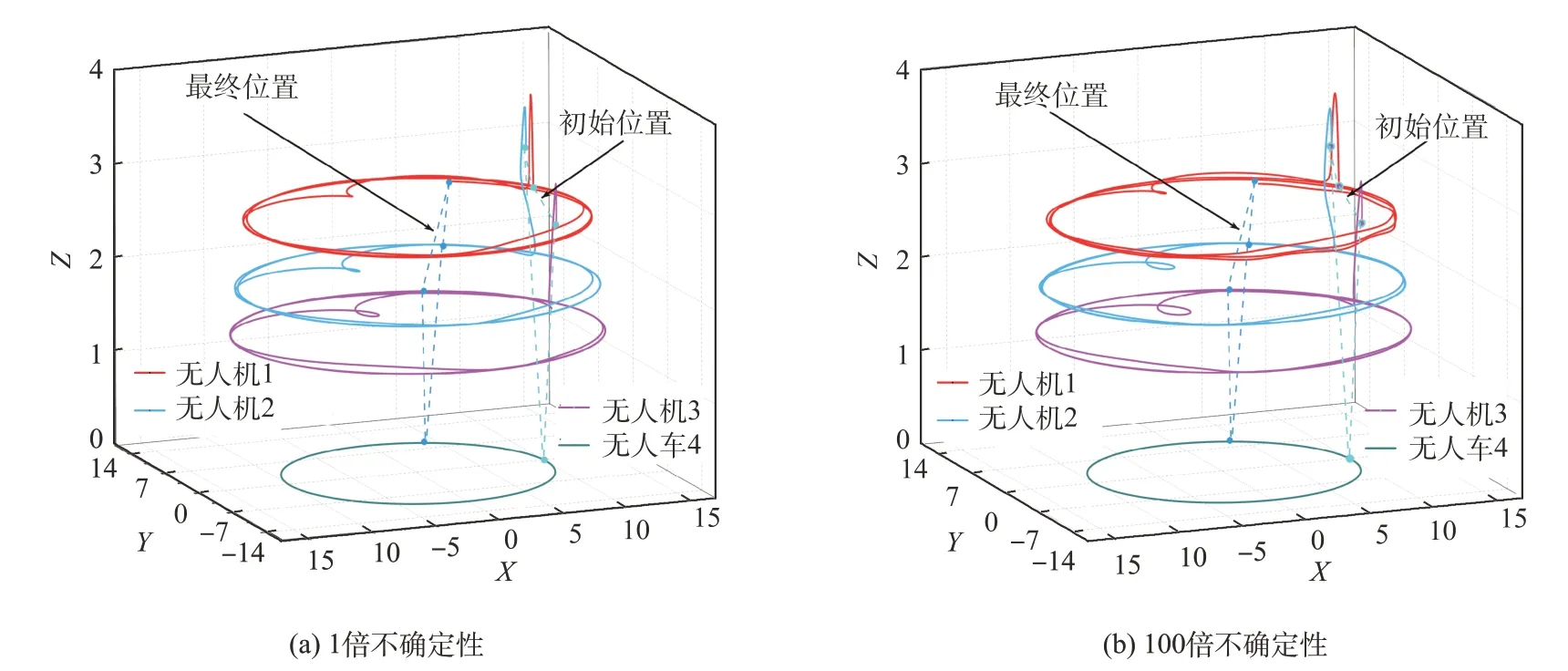
图2 自适应鲁棒控制下的运动轨迹Fig.2 Motion trajectories under the adaptive robust control
图2、图3 为在这两种方法控制下不同不确定性干扰时每个无人单位的运动轨迹情况。图4 为任意两架无人机之间的距离关系, 其中d12,d23,d31始终大于0,且采用自适应鲁棒控制的任意两架无人机之间的距离比LQR 控制时更快地稳定在安全值。图5 为每架无人机与地面之间的距离关系,其距离d1h,d2h,d3h始终大于所设最小安全距离h1,2,3,且相较于LQR控制,自适应鲁棒控制可使无人机更快地到达稳定的飞行高度。图6 为空地协同误差e14,24,34,可以看出,相较于LQR 控制,所提出的控制方法可以使空地误差更快地接近期望邻域。图7 为无人车的轨迹跟踪误差,在所提出的自适应鲁棒控制策略下,跟踪误差接近于期望邻域,而LQR 控制无法将跟踪误差稳定到期望邻域。图8、图9 给出了不同不确定性干扰下的自适应参数的变化趋势,二者都在10 s左右近似收敛至0。结合图2~9 在100 倍不确定性干扰下的图线,其所显示两种控制方法的各方面控制性能可以表明,当加大不确定性干扰时,所设计的自适应鲁棒控制器受到不确定性干扰较小,能够使得系统稳定运行。相比之下,LQR 控制下的无人系统受到了较大干扰,控制效果也随之下降,各类误差均无法收敛至稳定值。因此,本文所提自适应鲁棒控制方法有更好的鲁棒性,对不确定性干扰的抑制效果更好。
图3 LQR控制下的运行轨迹Fig.3 Motion trajectories under the LQR control

图4 无人机之间的距离Fig.4 Distance between UAVs
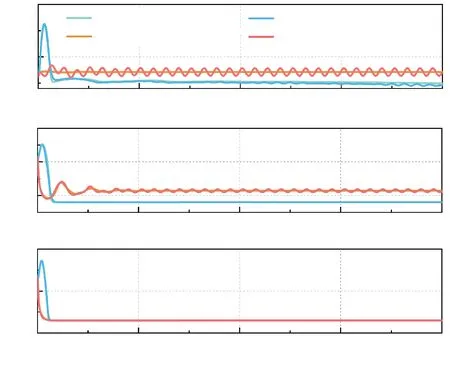
图5 无人机与地面的距离Fig.5 Distance between UAVs and ground

图6 空地协同误差Fig.6 Air-ground cross-domain coordinated errors
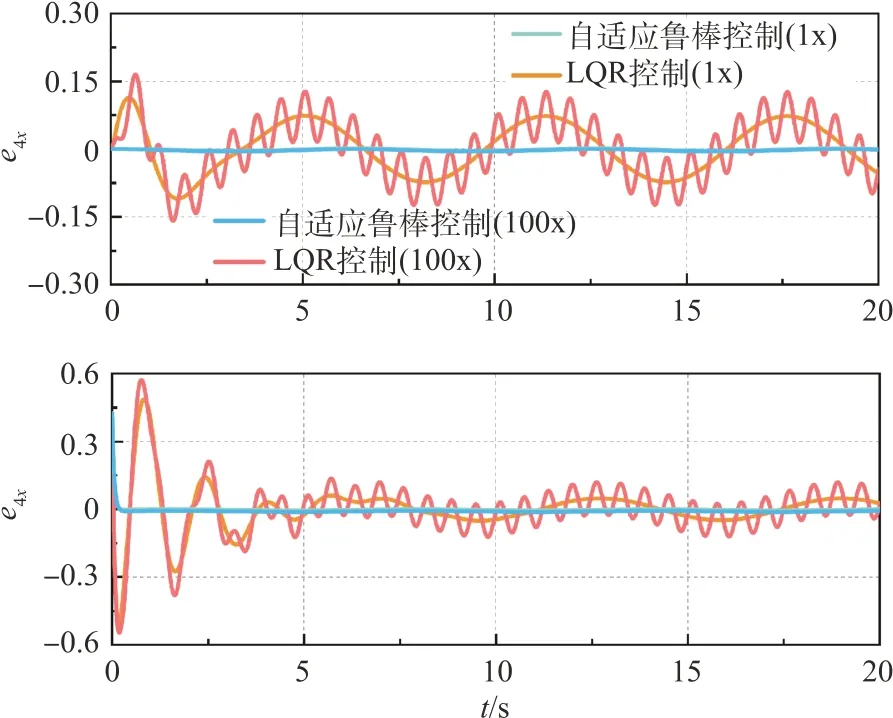
图7 无人车的轨迹跟踪误差Fig.7 Trajectory tracking errors of UGVs
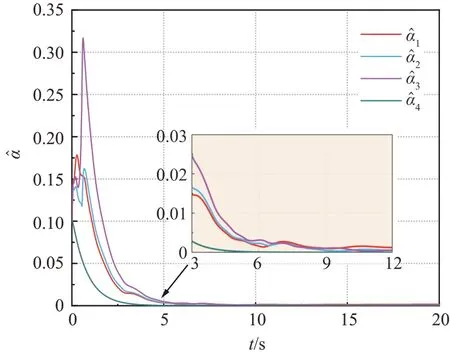
图8 自适应律的变化趋势(1x)Fig.8 Change tendencies of the adaptive laws(1x)
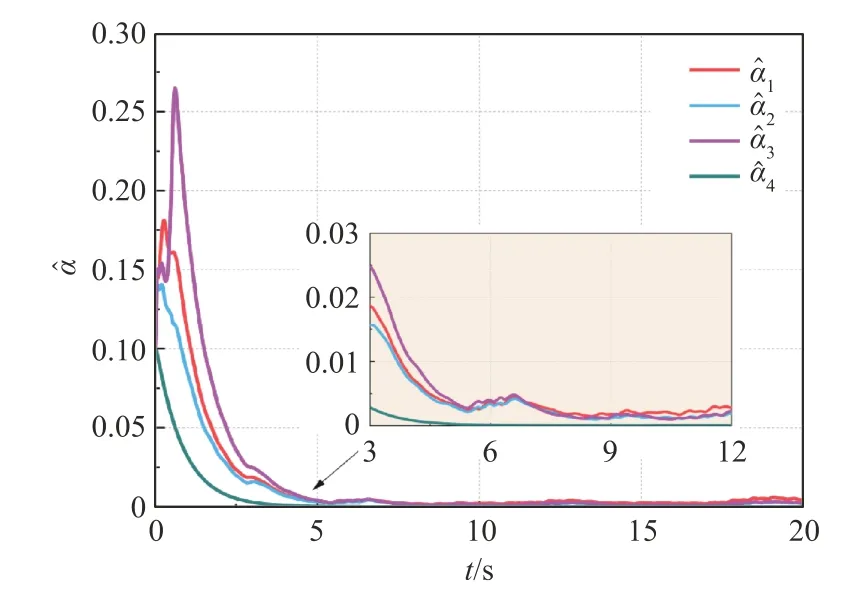
图9 自适应律的变化趋势(100x)Fig.9 Change tendencies of the adaptive laws(100x)
6 结 论
本文针对多任务空地无人集群系统控制问题,提出了一种同时解决多种任务的自适应鲁棒控制方法。通过创造性的转换,将四个控制任务分别转化为伺服约束,并将其整合在一个约束方程中,并建立了约束跟随误差χ表征系统性能,将空地协同控制问题转化为一类近似约束跟随问题。在此基础上,提出自适应鲁棒控制方案,并建立自适应律,使得系统在包含不确定性条件下呈现一致有界性和一致最终有界性。最后通过仿真分析,验证了所提控制方法能够实现具有避碰、轨迹跟踪和不确定性抑制性能的无人机-无人车空地集群控制。在未来的研究中,将进一步探究具有外部环境避碰性能的空地无人集群系统的控制方法。此外,还将搭建物理实验平台,进一步验证控制方法在实践中的有效性。
猜你喜欢
法律方法(2022年2期)2022-10-20
小学科学(学生版)(2021年9期)2021-11-02
小学科学(学生版)(2021年8期)2021-08-30
民用飞机设计与研究(2020年4期)2021-01-21
自动化学报(2019年6期)2019-07-23
中国外汇(2019年7期)2019-07-13
海峡姐妹(2017年11期)2018-01-30
厦门理工学院学报(2016年1期)2016-12-01
北京航空航天大学学报(2016年7期)2016-11-16
系统工程与电子技术(2016年4期)2016-08-24