基于RFID 的无线无源柔性压力传感器研究*
2024-01-09 07:19徐明浩聂宝清寇文哲
传感技术学报 2023年11期
徐明浩,聂宝清,寇文哲
(苏州大学电子信息学院,江苏 苏州 215006)
近年来柔性无线传感器凭借其出色的机械灵活性、高灵敏度和较短的响应时间在智能设备中被广泛应用,例如软机器人[1-2]、电子皮肤[3-5]、人机交互系统[6-8]和医疗健康监测系统[9-10]等。常见的无线传感器采用LC 耦合、蓝牙通信以及RFID 等技术实现。其中LC 无线传感器是通过外部读取天线和传感器之间的耦合实现[11-12],这种无线传感器可以实时检测生理信号且无需外接电源,具有结构简单、使用寿命长、可穿戴等优势,极大扩大了整个传感器系统的应用范围。最近,Lu 等[13]通过线圈电感器和空气腔型平行板的LC 谐振制作了一种生物可吸收、无源、无线压力传感装置,用于测量包括颅内、腹腔内和肺动脉高压的人体内部的压力。然而,采用LC 天线进行无线传输的最大传输距离仅有1 cm~2 cm,这限制了柔性传感器的实际应用。采用蓝牙通信技术的无线压力传感器具有传输距离远、抗干扰能力强、功耗低等优势。Qaiser 等[14]报告了一种用Ecoflex 对碳纳米管进行封装制成的压阻式传感器,将该装置连接在人体皮肤表面,用于收集与肌肉活动相关的输出信号,并通过低功耗蓝牙系统实现无线监控。但是采用蓝牙传输的传感器往往需要提供电源,这增加了整个传感器系统尺寸和刚性,降低了设备的机械灵活性。RFID 系统由标签和阅读器组成,当标签进入阅读器读写范围时会接收阅读器发出的射频信号,凭借感应电流所获得的能量向外发送存储在芯片中的信息[15-16]。Ma 等[17]将硅胶膜置于一对电感耦合开环谐振器中间,制成一种小型无源RFID 压力传感器,利用阅读器测量传感器散射信号的中心频率,判断压力的大小。但以测量中心频率的方式来感知压力需要对特定频段进行扫频,无法实现压力的实时测量。
本文提出了一种基于RFID 反向散射耦合原理的无线无源柔性压力传感器。它由反射层、柔性中间层和数据传输层组成。通过受压时反射层与数据传输层间距的变化改变标签的反射信号,解耦阅读器的接收信号强度指示(RSSI)值,实现压力的无线无源实时测量。该传感器的最大工作距离为10 cm,相较于传统无线无源压力传感器工作距离小于1 cm,拓展了无线无源压力传感器的应用范围。
1 传感器工作原理
1.1 传感器结构
本文所设计的传感器由三层柔性层构成,如图1所示,分别为顶层的反射层、底层的数据传输层,以及夹在二者之间的柔性中间层。其中反射层采用高磁导率的铁氧体构成,中间层采用柔性海绵,底层采用商用RFID 标签5030。
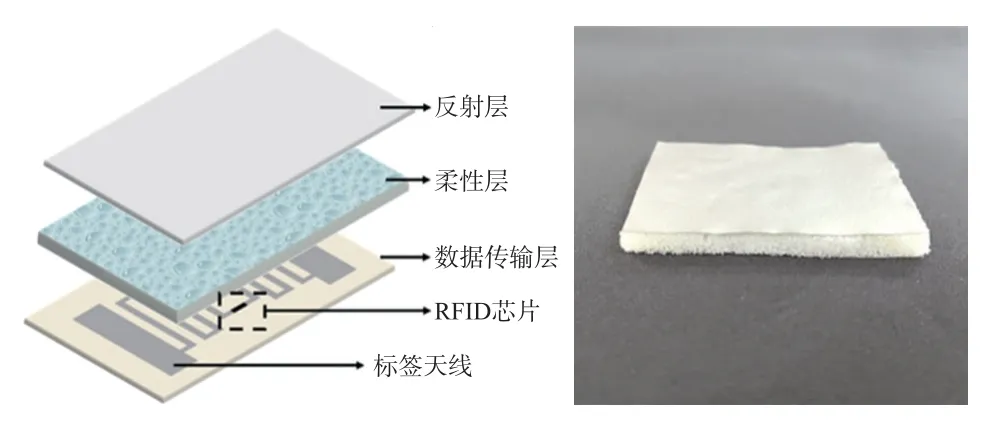
图1 传感器结构示意图与实物图
1.2 RFID 标签工作原理
整个传感器系统工作于超高频(UHF)频段,传感器的工作基于RFID 标签工作原理,如图2 所示。阅读器发出用于传输能量和查询信号的电磁波,传感器中的RFID 标签通过标签天线获取能量并激活与其相连的标签芯片,芯片通过改变自身阻抗使标签天线反射给阅读器不同强度的信号[18],阅读器根据反射信号解析出其接收信号强度指示(RSSI)值。
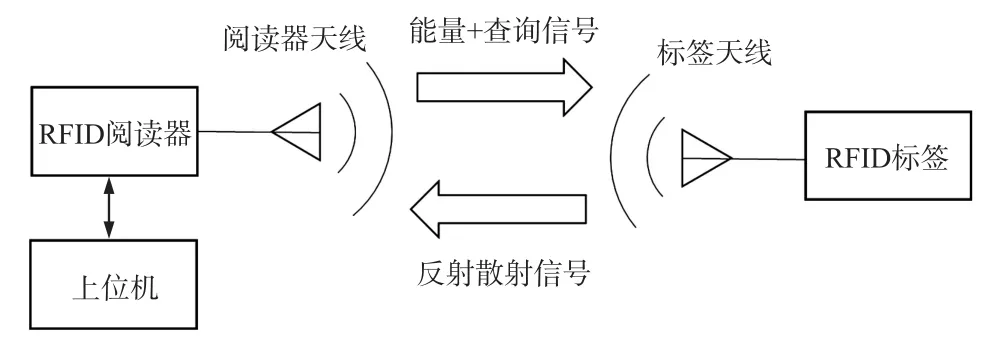
图2 RFID 标签工作原理
本文所使用的RFID 标签可分为对称偶极子式的标签天线和RFID 芯片两部分,其等效电路图如图3 所示。
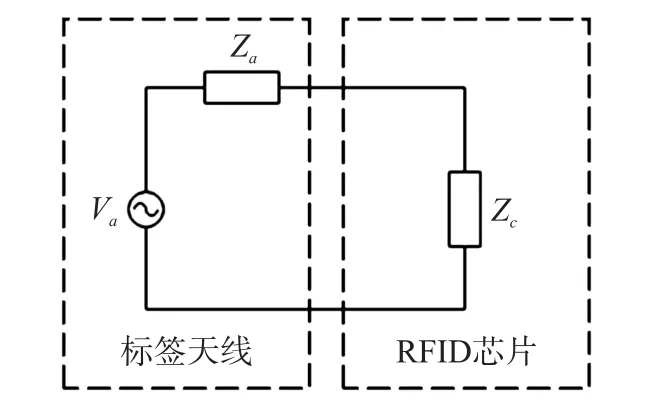
图3 RFID 标签等效电路图
图3 中,Za为标签天线的输入阻抗,Va为标签天线接收到外界能量后产生的等效电源,Zc为标签芯片的等效阻抗。在理想情况下,当输入阻抗Za和芯片阻抗Zc共轭匹配时,标签天线的增益达到最大。而在实际测量环境中,由于反射层以及周围环境的影响,传感器的实际增益Gr可表达为:
式中:Gmax为理想状态下传感器的最大增益;τ为功率传输系数,代表标签天线与芯片之间的匹配程度,其表达式为[19-20]:
式中:Rc为芯片的等效电阻;Ra为标签天线的输入等效电阻;Zc为芯片的等效阻抗;Za为标签天线的等效阻抗;
由公式2 可知,当Za=Z*c时功率传输系数τ达到最大值,天线和标签匹配度最高,此时传感器的增益Gr达到最大。在考虑到现实空间中存在反射、散射、吸收等一系列导致信号失真的因素,即电磁波传递过程中的路径损耗,其表达式为[21]:
式中:d为阅读器与标签天线之间的距离;λ为电磁波波长。
本文使用915 MHz 频段的电磁波,其波长为0.328 m。阅读器天线最终接收到的接收信号的强度指示(RSSI)值可以表示为:
式中:Pt为阅读器的发射功率;Gt为发射天线增益;Gr为标签天线的增益;PL为路径损耗。
当传感器受到压力后,中间层被压缩导致反射层与数据传输层的间距变小,标签阻抗出现失配,进而使传感器的增益变小。而在一般情况下Pt和Gt的发射功率不变,在阅读器与标签天线之间的距离d保持不变的情况下,阅读器接收到的RSSI 值与传感器当前增益Gr的关系可表示为:
因此通过获取传感器反射回阅读器的RSSI 值,解耦换算为当前传感器测量所得的压力,实现压力的无线测量。
2 仿真与分析
通过有限元仿真(HFSS,Ansoft)的方式对传感器的增益进行仿真。首先,参照商用RFID 标签5030 的相关参数,在具有相对介电常数ε为3.8、长为55 mm、宽为33 mm、厚度为0.05 mm 的PET 的基底上进行标签天线的仿真。为了使反射层对数据传输层的增益产生更大的影响,在标签正上方放置一层厚度为0.05 mm,面积与标签相同的铁氧体薄膜[22-23](相对磁导率μr为1 000),最后在二者间填充一层海绵。传感器仿真模型如图4 所示。
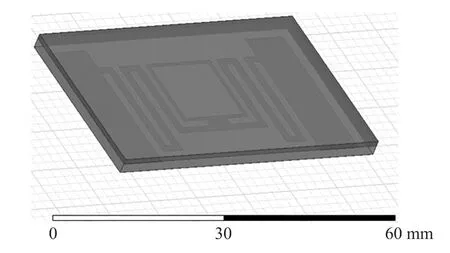
图4 传感器仿真模型(传感器增益)
为了研究反射层与数据传输层之间的距离变化对传感器增益的影响,在仿真过程中通过改变中间层的厚度模拟传感器受压时中间层发生的形变。传感器的增益仿真如图5 所示,其中纵轴代表传感器正上方的最大增益值。
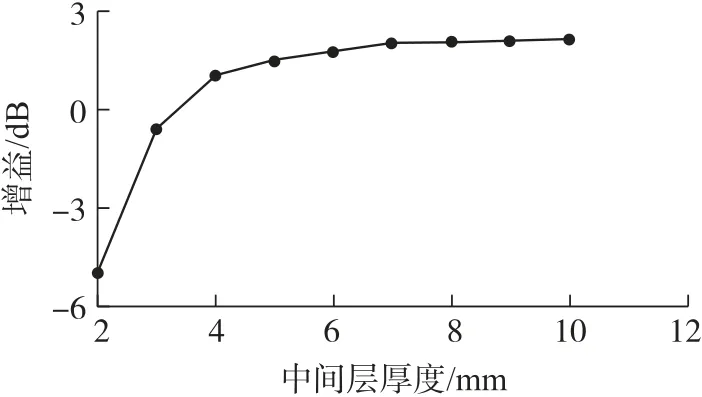
图5 传感器增益仿真结果
根据仿真结果可知:当传感器中间层厚度变小时,传感器的增益也随之变小,反之增益变大。此外,可以发现当中间层厚度超过5 mm 时,传感器增益的增长速率变缓。因此为了提高传感器的灵敏度,选取5 mm 作为中间层的厚度。
杨氏模量可以表征物体变形难易程度,表示为E=σ/ε,即应力σ与应变ε之比。通过杨氏模量的对比,可以直观地看出物体是否容易被压缩。本文中传感器的输出与其中间层的形变量有关,因而选取了常见的两种不同密度[24]的海绵(35D、10D)作为传感器的中间层,通过有限元仿真(COMSOL)的方式,探究不同密度海绵作为中间层对传感器杨氏模量的影响,传感器仿真模型如图6 所示。
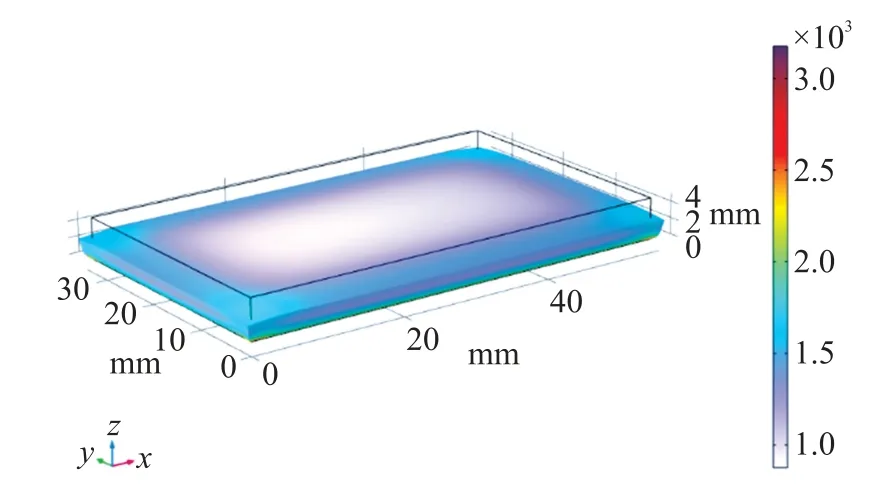
图6 传感器仿真模型(对杨氏模量影响)
图6 中,中间层海绵选取密度为35D 设为Ⅰ型传感器;选取密度为10D 设为Ⅱ型传感器。图7 所示为两种传感器杨氏模量的仿真结果。可以发现当受到相同压力时,Ⅱ型传感器中间层的形变量更大,所以Ⅱ型传感器的杨氏模量比Ⅰ型小。根据图5 和式(5)得传感器中间层厚度变小将导致阅读器接收的RSSI 值变小。当受到相同压力时,使用密度小的海绵作为中间层的传感器更容易被压缩,其输出值RSSI 的相对变化量更大,因此传感器的灵敏度更高。
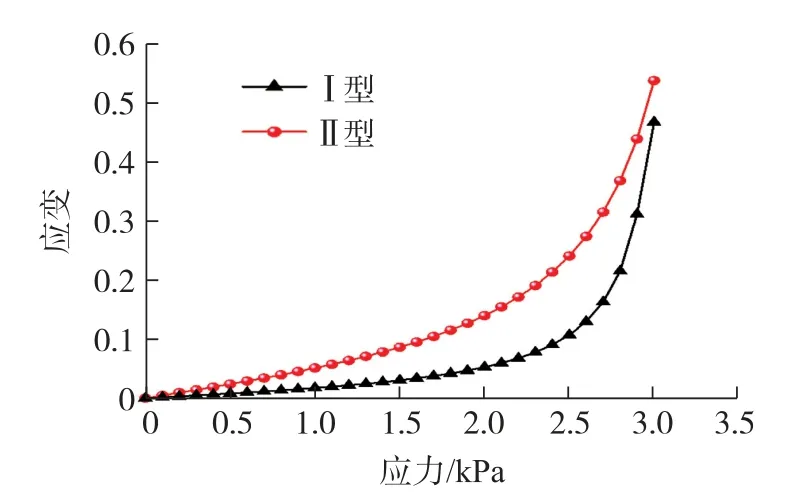
图7 两种传感器杨氏模量仿真结果
3 传感器性能测试
3.1 传感器灵敏度
根据上述仿真结果,使用厚度为5 mm、密度分别为35D 和10D 的两种不同密度海绵作为中间层制成传感器,进行灵敏度的测量。如图8 所示,利用亚克力板制作的支架使阅读器与传感器的距离保持为10 cm,两种传感器的初始RSSI 值均为-27 dBm,为了方便对比将传感器的输出转换为相对接收信号强度指示(ΔRSSI)值表示。用高精度(分辨率为10 mN)测力计和线性移动平台(分辨率为0.1 μm的步进电机驱动)组成压力测试系统,通过台式计算机控制安装在线性移动平台上的测力计移动,同时记录传感器的压缩距离和受到的机械负载。其中,压力用测力计的示数与传感器面积之比表示,灵敏度用传感器的输出ΔRSSI 与压力之比表示。图8中的曲线表示施加给传感器压力与输出ΔRSSI 值的关系。随着施加给传感器压力的逐渐增加,两种传感器的输出均逐渐变小。其中,Ⅰ型传感器在压力为0~2.09 kPa 时,灵敏度为-0.62 dBm/kPa。当施加压力超过2.09 kPa 时,灵敏度增加到-4.95 dBm/kPa,其测量范围为0~4.57 kPa。而Ⅱ型传感器在压力在0~1.55 kPa 范围内时,灵敏度为-1.61 dBm/kPa。当施加压力超过1.55 kPa 时,灵敏度增加到-6.75 dBm/kPa,其测量范围为0~3.09 kPa。对比两种传感器的灵敏度曲线可以发现,当施加压力大小相同时,Ⅱ型传感器输出的ΔRSSI 比Ⅰ型大,说明使用低密度海绵作为中间层的传感器灵敏度更高,实验结果与上述仿真结果相符,证明了传感器设计的合理性。
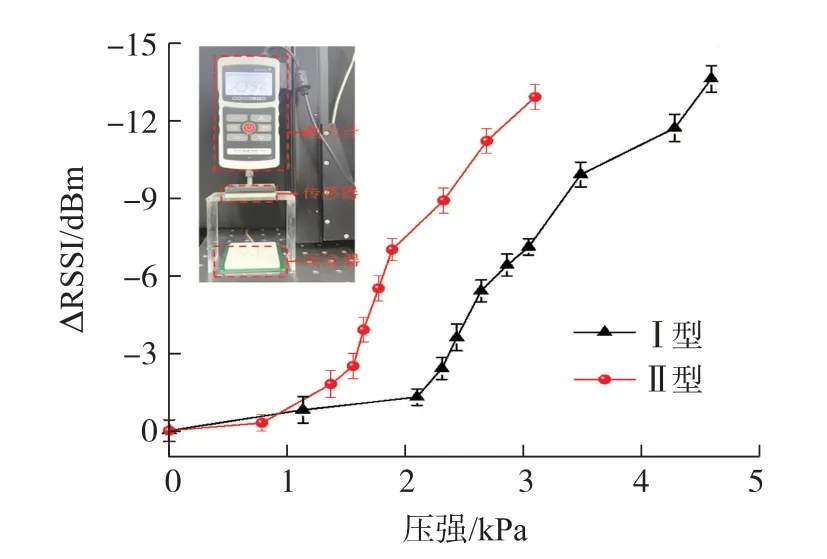
图8 传感器灵敏度
3.2 传感器重复性
为了验证传感器测量压力的重复性,对传感器施加了周期性的负载,测试传感器多次使用后输出的稳定性。如图9 所示,当传感器空载时其初始输出为-27 dBm,为了方便对比将输出转换为相对接收信号强度指示(ΔRSSI)。以0.05 Hz 的频率施加2.4 kPa的重复机械负载(上方曲线)。以4 Hz 的采样频率记录传感器的输出,并进行平滑滤波(下方曲线)。由于传感器输出与负载在同一周期内变化,表明传感器能够准确地响应动态负载,并保持稳定的输出。
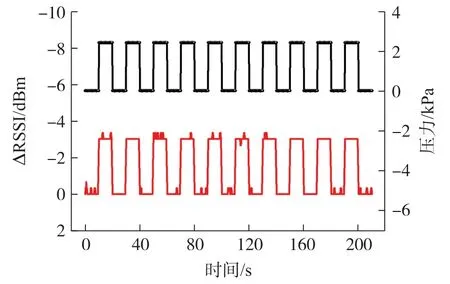
图9 传感器重复性
3.3 传感器最大工作距离
在无线传感器的所有特征参数中,最大工作距离是衡量无线传感器性能的最重要的参数之一,它表示传感器工作时与读取模块的最大分离距离。如图10 所示,分别测试了LC 谐振式传感器和RFID传感器的最大工作距离。其中,LC 谐振式传感器的最大工作距离需根据其谐振频率处的相位差判断,当最大相位差低于最小可检测电平对应的相位差时,确认为最大工作距离。图中三角型代表不同分离距离下传感器的相位差,下方虚线代表最小可检测电平对应的相位差,根据虚线得到其最大传输距离为1.32 cm。本文所提出RFID 传感器的输出值RSSI 代表读取模块接收信号的强度,它会随着传感器受到负载压力的增大而变小直到信号丢失。因此,给传感器施加4.57 kPa 的负载时测量其最大工作距离,经测试当RSSI 低于-41 dBm(图中上方虚线)时读取模块无法正常获取传感器的反射信号,从而确定其最大工作距离为10 cm。对比同样为无线无源的LC 谐振式传感器,RFID 传感器的最大工作距离有显著的提高(7.57 倍),解决了限制无线无源传感器无法远距离测量的问题,进一步拓展了无线无源传感器的应用范围。
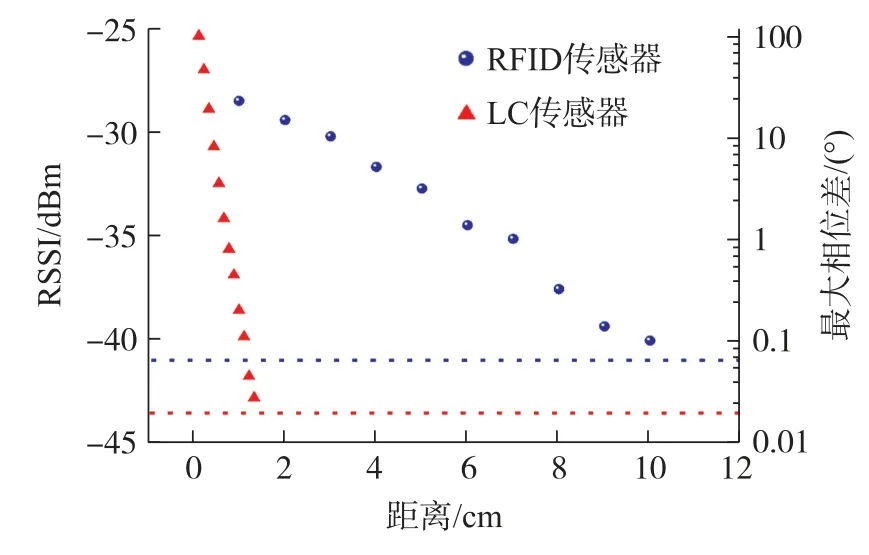
图10 不同传感器传输距离对比
3.4 环境对传感器性能的影响
为了模拟实际应用下不同环境对传感器性能的影响,测试了不同温度和湿度下传感器的输出响应。如图11 所示,将传感器置于加热板上,用亚克力板制作的支架固定阅读器,使传感器与阅读器的距离保持为10 cm。实验测试了传感器在25 ℃~45 ℃的温度范围内的RSSI 值变化,在测量过程中对每个温度值取10 次测量结果并求取均值,经测试传感器在测量的温度范围内输出误差为0.91%。如图12所示,将传感器放置于亚克力板制作的密闭容器中,用加湿器增加容器内的湿度,并在容器侧面制作一个圆形开槽方便湿度计测量容器内的湿度,最后将整个容器置于支架上方,保持阅读器与传感器距离为10 cm。实验测试了传感器在43%RH~82%RH湿度范围内的RSSI 值变化,同样对每个湿度值采集10 次输出结果并求取均值,经测试传感器在所测量的湿度范围内输出误差为0.89%。测试的环境参数均模拟正常室内的温湿度且输出误差均小于1%,因此可以说明传感器在正常室温环境下具有良好的稳定性。

图11 温度对传感器性能影响
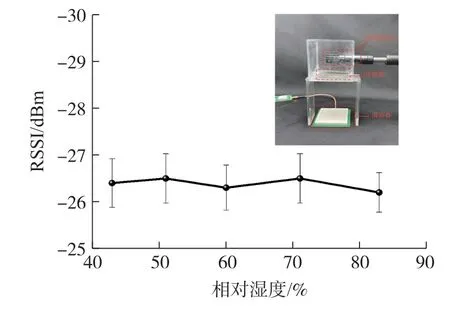
图12 湿度对传感器性能影响
4 结论
本文设计了一种基于RFID 反向散射耦合原理的柔性无线无源压力传感器,具有无源工作距离远、柔性可穿戴等优势。根据理论推导、有限元仿真的方式并结合压力测试系统对使用35D 和10D 两种不同密度海绵作为中间层的传感器进行测试,仿真和实验结果均表明中间层为低密度海绵的传感器具有较高的灵敏度,在测试范围内的最高灵敏度为-6.75 dBm/kPa。通过模拟不同温湿度条件测量环境对传感器输出的影响,其中在25 ℃~45 ℃温度测量区间内传感器误差为0.91%,在43%RH~82%RH 的湿度测量范围内误差为0.89%。通过周期性负载循环测试,证实了传感器具有良好重复性并能准确地响应动态负载。未来将传感器制成传感器阵列并应用于医用绷带压力无线测量、足底压力无线检测等智能医疗领域,使其具有更高的实用价值。
猜你喜欢
电子设计工程(2022年15期)2022-08-17
轮胎工业(2020年4期)2020-03-01
电子制作(2019年12期)2019-07-16
东北师大学报(自然科学版)(2018年3期)2018-09-21
北京航空航天大学学报(2017年6期)2017-11-23
互联网天地(2016年2期)2016-05-04
焊接(2016年8期)2016-02-27
焊接(2016年6期)2016-02-27
现代计算机(2015年17期)2015-09-26
电测与仪表(2015年13期)2015-04-09