温室剔补苗并联机器人设计与试验分析
2024-01-10 09:31王南竹朱梦岚莫吾乙朱志燃杨启志
农业装备技术 2023年6期
王南竹,朱梦岚,莫吾乙,朱志燃,杨启志
(江苏大学农业工程学院,江苏 镇江 212013)
0 引 言
穴盘育苗技术是我国温室育苗的主要形式,在移栽前进行剔补苗工作可以有效地减少缺苗、病弱苗等情况,极大地提高后期移栽成功率和移栽质量。但目前我国剔补苗工作主要是由人力进行,工作效率低下,穴盘幼苗损伤率高、质量难以保证,且人工费用昂贵[1]。我国目前对剔补苗机械化的研究很少,更多的是对移栽机械的研究,且大部分不具备视觉系统,因此研究温室穴盘苗剔补苗并联移栽机器人不仅保证了穴盘苗的完整性和成熟度,还推动了我国温室育苗向机械化、自动化、工厂化、集约化方向快速发展[2]。国外的一些农机专家专门对移栽机的研发作了大量研究,但都是按照国外的温室种植模式和要求进行设计,无法适应国内温室穴盘苗移栽的需要。2005 年,中国农业大学的强丽慧等[3]设计了生菜自动移栽机,2007 年,沈阳农业大学田素博等[4]设计了一种基于PLC 系统的钵苗移栽机械爪,江苏大学马履中等[5]第一次以并联机构为主体设计了温室穴盘苗自动移栽机,2013—2016 年,浙江大学蒋焕煜等[6]设计开发了一种温室钵苗自动移栽装备样机,但是目前国内的移栽机只适合标准化的种植模式和栽培方式,需要精确的穴盘横向进给系统[7]。
针对这些问题,本文在详尽了解研究对象的基础上,结合并联机构运动速度快,能够实现作业的精准定位、降低移栽的失误率、动态性能平稳可靠等一系列优点,设计一款以并联机构为主体的剔补苗机构系统。
1 并联机器人结构优化
1.1 并联机构结构存在问题
与传统串联温室剔补苗机构相比,穴盘苗剔补苗并联机器人具有结构简单、速度快、定位精度高、震动小、三自由度移动等特点[8],适合在我国的中小型温室育苗模式推广使用。定位精度工作的顺利完成主要受移栽机构设计的影响,该剔补苗机构的主要结构为Delta 并联机构,通过对并联机构进行优化可提高机器人机构的刚度和灵活度[9]。
本文研究的第一代温室并联移栽机器人主要分为3 个部分:动平台、三条支链和静平台,并由3RRC 三平移并联机构推演出该并联机器人主体机构。
但是在实验过程中发现,对于支链B 和支链C来说,其所需要转动的3 个关节处的转动副所用材料横截面积过小,导致径向支撑力不足,极大地降低运动的平稳性,另外从动臂采用单杆连接,导致抵抗受外力变形的能力不够,从而导致并联机构整体运动精度降低[10];支链A 的驱动力臂长度过长,使得剔补苗机构平稳性降低,从而导致并联移栽机器人力学性能较差,移栽时的精确度较低。
1.2 并联机构结构优化
图1 所示,对于支链B、支链C 来说,将主动臂更换为横截面积较大、力学性能较好的金属材料,将镂空的机械臂结构设计改为圆柱形,下端连接的细单连杆改为平行桁架结构的双连杆结构,从一个转动副连接增加到两个转动副连接,此设计通过增大转动副与连杆直接接触面积,达到获得较大径向支撑力的效果,进而增强整个支链抵抗外力变形的能力。通过减少支链A 的驱动力臂的长度,增大支链A的刚度。所述的3 条支链与动平台通过球铰连接,在伺服电机的驱动下,动平台在空间中完成高速、高频、高精度的三平移运动。
在移栽过程中,对称结构可以提高投苗的精准度,因此为了进一步完善剔补苗机器人的对称性,机器人材料:静平台、支链电机座和驱动臂材料选用经过调质处理后的45 号钢,支链球铰结构材料选用7075 铝合金,支链的连杆结构材料选用碳纤维杆[11],确保工作空间范围为平行长方体。
2 并联机器人轨迹规划
剔补苗机器人的主要功能是将被培育的穴盘苗中的坏苗、病弱苗剔除并将装满健康幼苗供苗盘中的幼苗补充回空缺区域[12]。对于温室穴盘苗移栽工作来说,幼苗穴盘密度大且幼苗茎叶脆弱易受到损伤,因此要求剔补苗机构具有较高的平稳性、精确性、结构钢性。
2.1 并联机构的构成
如图2 所示,并联机器人由机架、静平台、3 条支链、动平台和末端执行器组成。静平台上安装有3台伺服电机,每台伺服电机分别控制1 条支链,每条支链包含1 条主动臂和1 条从动臂,伺服电机和主动臂连接在静平台上并控制其作旋转运动,带动从动臂驱使动平台在工作空间内作三自由度运动,在整个工作过程中,动平台和静平台保持平行状态。

图3 实际移栽轨迹
2.2 输送装置工作流程
在取苗、移苗、植苗3 个过程中,要确保穴盘苗完整、平稳地栽植到穴盘中。在剔补苗机器人工作时需要降低末端取苗爪所受的冲击力与振动力;以辣椒幼苗为例,在并联机构工作的一个周期中,要避免周围的辣椒幼苗对被移栽对象造成干涉;另外,整个过程末端执行器运动要求高精度、高效率完成栽植苗过程。
该剔补苗机器人在一个移苗周期内需要完成抓、投两个动作指令,需要在供苗盘中抓取健康的辣椒幼苗,上升到高度H,接着按照平行运动轨迹移动到植苗盘的空穴,然后进行下降投苗。如图4 所示,本文中机器人主要实现穴盘苗点对点剔除、栽植。在移苗过程中经过拐点处会产生较大的冲击力,可能会导致钵苗盘根破碎,如图5 所示,在拐点处设计适合作业要求的圆弧形过渡[10],可以减少因惯性带来的冲击。对末端执行器的运动进行合理的轨迹规划,可以提高移栽稳定性,减小系统运动冲击,有效地保证钵苗的完整性。

图4 移栽过程
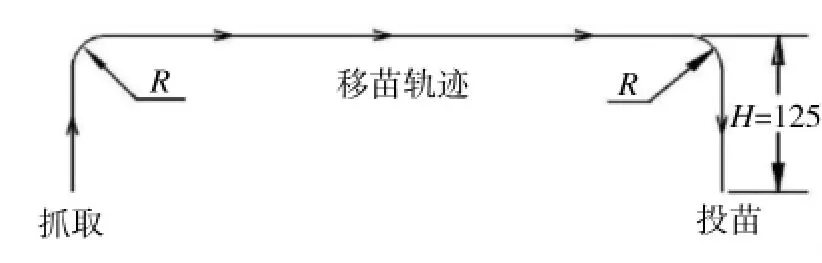
图5 穴盘苗的移栽轨迹
剔补苗机器人与输送装置集成后,输送装置通过驱动电机驱动链条运转,现以供苗盘工作一侧为例,演示其在穴盘苗进入到离开输送装置的工作过程[12]。
(1)剔补苗机器人执行工作前:苗盘未进入输送装置,定位气缸活塞处于伸长状态,如图6(a)所示。
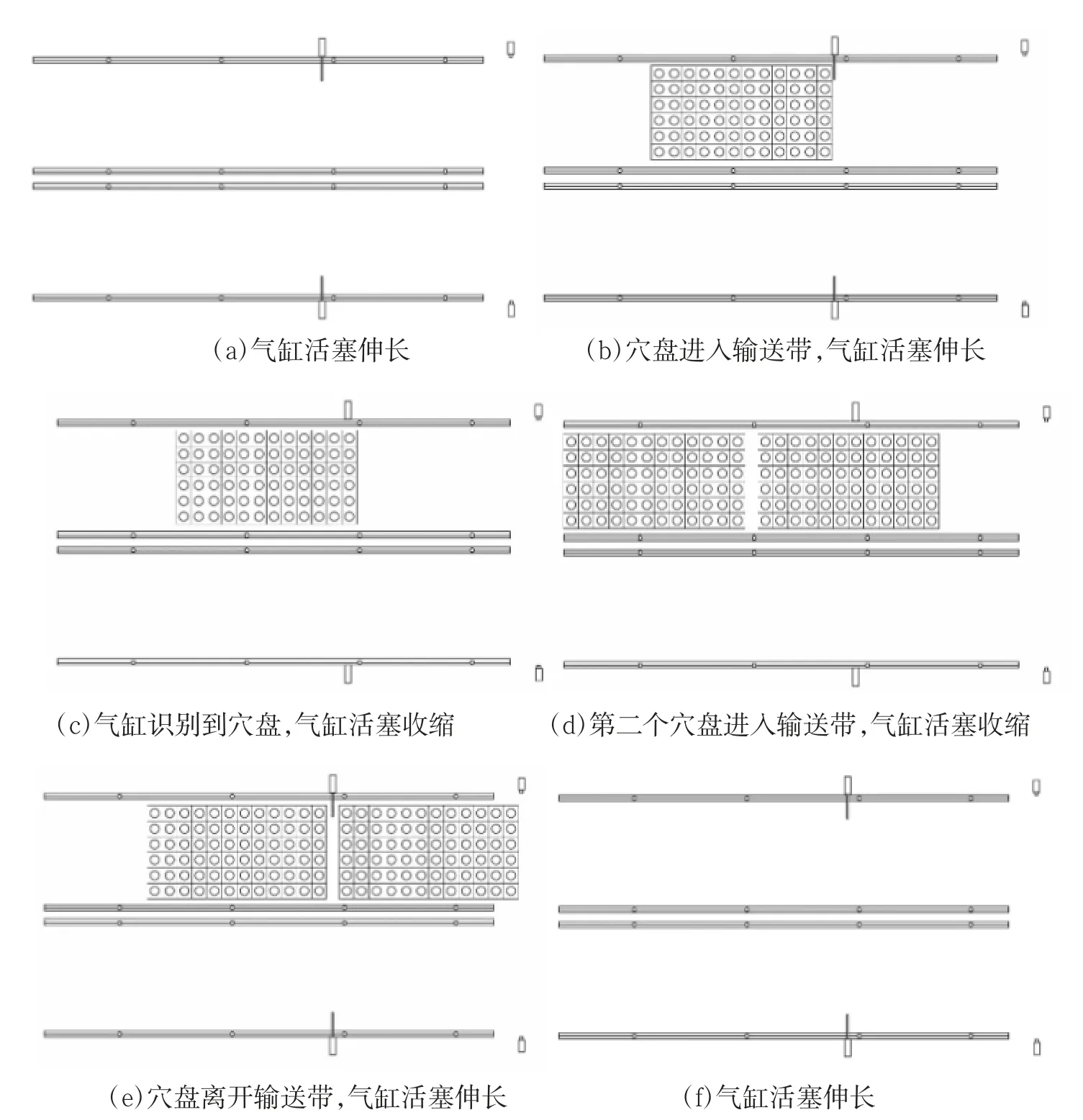
图6 输送装置工作流程
(2)剔补苗机器人开始工作时:苗盘进入输送装置,到达气缸活塞位置时停止,此时苗盘进入工作区域,剔补苗机器人开始进行剔补苗作业,如图6(b)所示。
(3)当此苗盘被检查完毕时:定位气缸的活塞收缩,苗盘随输送装置向前移动,如图6(c)所示.
(4)当气缸活塞收缩时:新的苗盘被放入输送装置,如图6(d)所示。
(5)当已完成剔补的苗盘离开输送装置时:已完成剔补的苗盘的前端挡住光电传感器,定位气缸的活塞伸长,如图6(e)所示,输送装置继续工作,按照步骤(1)剔补苗机器人开始重新工作,如图6(f)所示。
3 图像识别方法研究
近年来,随着工业视觉技术的发展,以农作物为对象进行视觉特征识别方面的研究不断深入,本文为了实现对穴盘幼苗生长状态的实时检测,设计了一种基于PLC 控制的信息采集系统[13],通过分析幼苗叶片图像,以实现对缺苗、病弱苗的精确识别。如图7 所示,通过工业相机对幼苗进行识别,图像经过处理后传送给PLC 控制器,进而完成剔补作业。

图7 图像采集系统
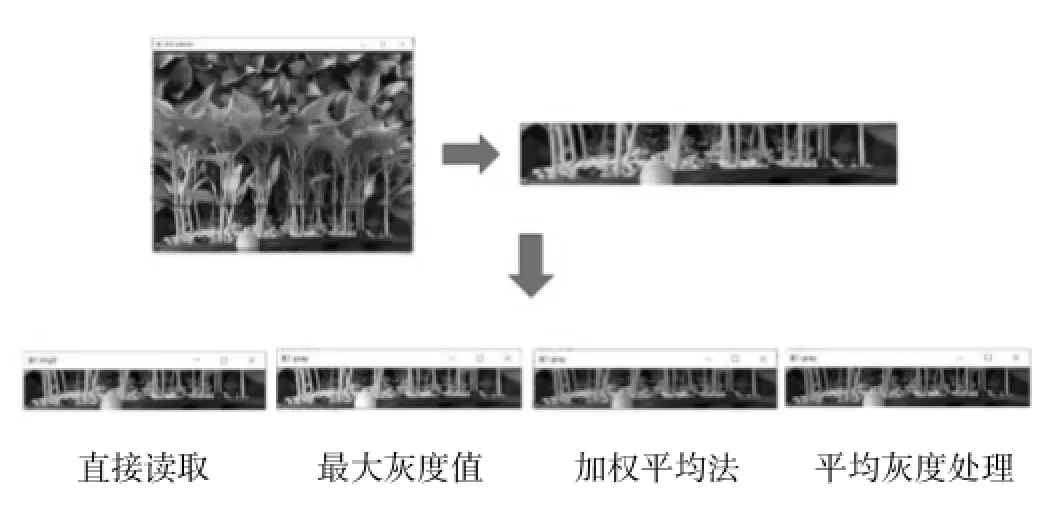
图8 图像处理
3.1 工业相机的选择
机器视觉系统的核心部件,工业相机的选择对于穴盘苗状态的识别起着决定性作用,对于本实验中,要求相机具备高分辨率、动态范围大等特点。
CCD 和CMOS 传感器是目前最常见用于工业生产的感光传感器,CMOS 信号读取十分简单,还能同时处理各单元的图像信息,速度也比CCD 快很多。但CCD 采用PN 结构或二氧化硅(SiO2)隔离层隔离噪声,成像质量比CMOS 高。CCD 相机的ISO感光度、分辨率、噪点要优于CMOS 相机,COMS 相机逻辑摆幅大,使电路抗干扰能力强,其集成度、功耗、成本相较于CCD 更优。随着CMOS 成像技术的不断发展,有越来越多的公司可以提供高品质的CMOS 成像芯片。 本实验选用海康威视MV-CE060-10UC。表1 为所选取的工业相机的相关参数。

表1 工业相机参数
3.2 图像处理方法
穴盘苗生产过程的每一个环节都对蔬菜生长起到决定性作用。目前我国的剔补苗工作主要由人工进行,工人通过肉眼识别幼苗的生长状态,判别是否为病弱苗,但是缺乏系统性,主观的判别在生产过程中会产生误差,精确度低[14],因此开展数字化判别技术研究、建立数字化判别基准是极为重要的。
图像处理流程如图9 所示,利用open cv 的ndarray 切片方式,截取图像;利用open cv 进行图像灰度化、图像去噪、图像分割等图像处理环节;使用canny 边缘检测算法提取辣椒苗茎秆轮廓,根据参照物像素大小求出辣椒苗茎秆实际尺寸。
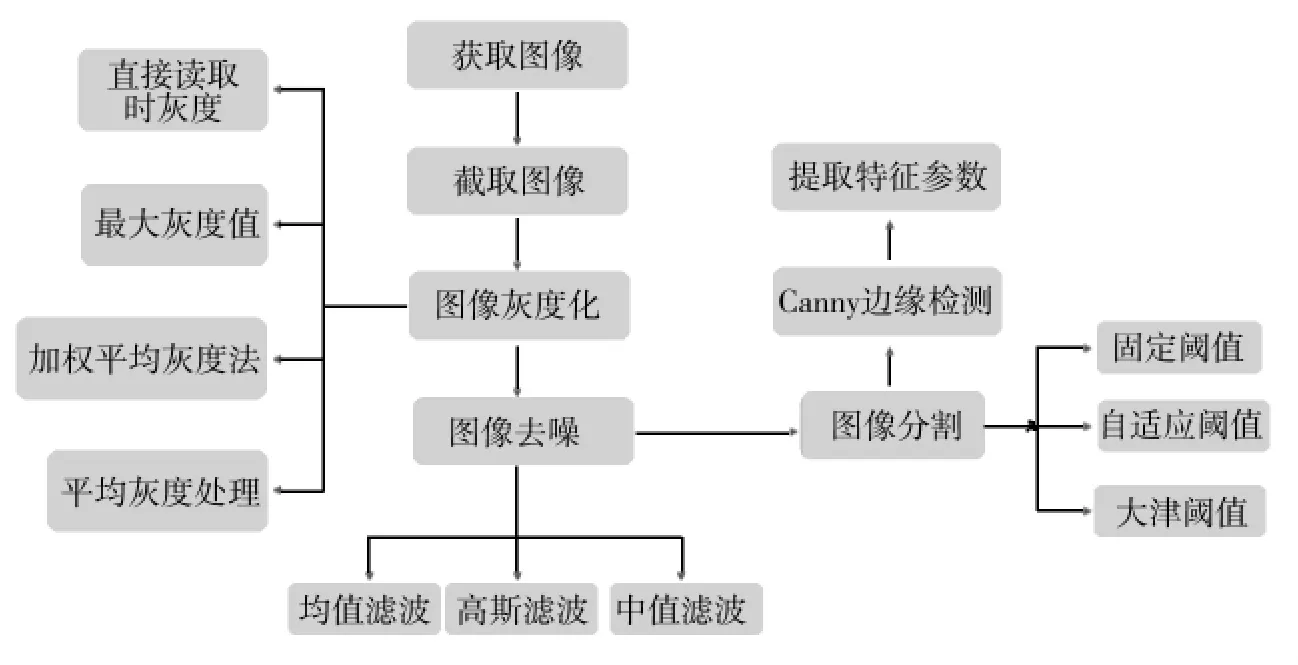
图9 图像处理流程
根据对幼苗固定生长周期的多盘穴盘苗进行统计分析,设定茎粗健康值范围,若幼苗固定生长期的茎粗在范围之外,判定为不健康幼苗,茎粗为0 时,为缺苗[15]。
4 并联剔补苗机器人控制系统的设计
对于本剔补苗机器人的控制系统主要基于PLC系统,这种开环系统结构简单,可以满足实验要求。本文中剔补苗并联机器人主要任务是将培育穴盘中的缺苗、病弱苗识别出来,并将病弱苗剔除,同时把供苗盘中的健康幼苗移栽到育苗盘中,根据所给的穴盘苗拟运动轨迹完成剔补苗移栽任务。所述并联剔补苗机器人共有3 条驱动支链,每条驱动支链分别被伺服电机控制并带动末端执行器进行取苗工作,这需要控制系统具有进行多轴控制并联机器人的能力[10],其总体控制方案见图10。
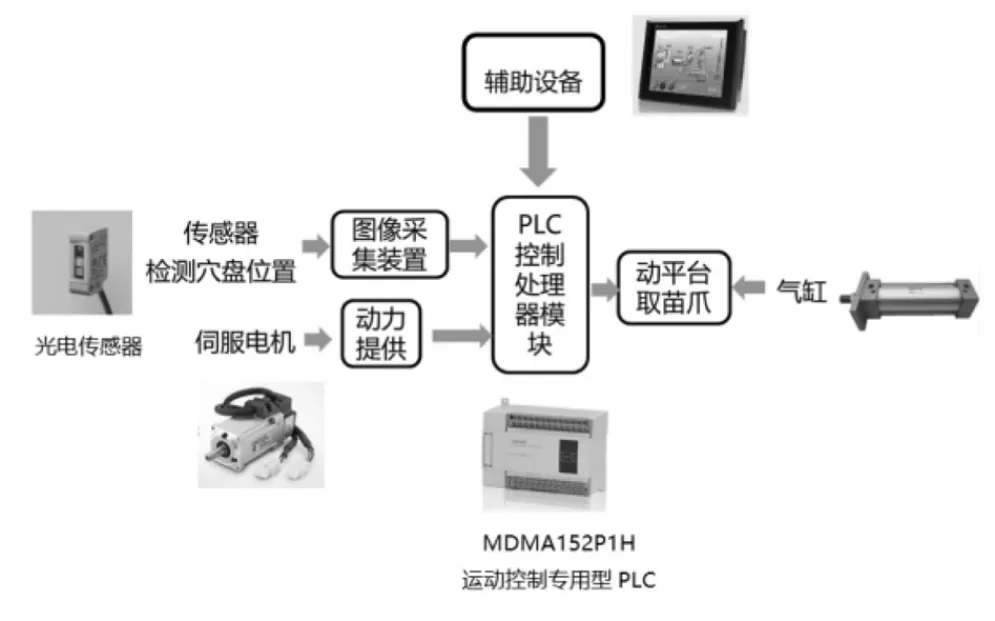
图10 控制系统示意图
基于并联机器人的剔补工作特点,以及可以适应不同的工作模式。本控制系统将基于PC 机搭建一套开放式的控制系统,如图11 所示,由PLC 系统进行控制[16],PLC 系统是以计算机为核心实现对伺服系统以及其他传感的控制。PLC 控制器控制伺服电机驱动主动臂动作,进而控制电磁阀和末端执行器动作。
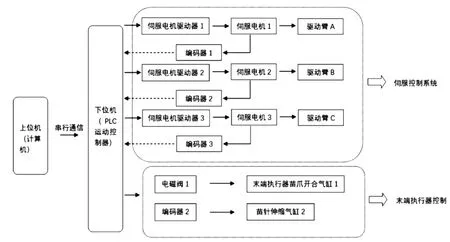
图11 PLC 控制系统
5 结 论
(1)本文设计了一种基于并联机构的用于温室穴盘剔补苗的并联机器人,将第一代的并联机器人结构进行优化,增加其工作时的平稳性,使并联机器人可以适应高速剔补苗工作。
(2)本文明确指出温室穴盘剔补苗机器人的路径规划、图像处理、视觉识别,接下来对剔补苗机器人的研究具有参考作用。
猜你喜欢
现代农业装备(2023年2期)2023-05-08
四川党的建设(2022年13期)2022-07-07
中国农业大学学报(2021年9期)2021-11-09
农业工程学报(2021年3期)2021-04-15
山东林业科技(2019年2期)2019-06-03
新疆农垦科技(2018年3期)2018-04-24
新疆农机化(2018年6期)2018-03-06
农家科技下旬刊(2017年5期)2017-06-20
实用手外科杂志(2015年2期)2015-08-28
饲料博览(2015年4期)2015-04-05