基于灰度图的空基双站交会定位区模型*
2024-01-18 10:23刘浩淼孟令杰李鹏佳
火力与指挥控制 2023年12期
刘浩淼,孟令杰,李鹏佳
(国防科技大学电子对抗学院,合肥 230031)
0 引言
电子对抗直升机作为低空、超低空的信息纽带,丰富了立体空间的作战方式,从而成为战斗力新的增长点[1]。近年来,我军开始发展电子对抗直升机装备,但是理论还不够完善,因此,对其进行研究十分有意义。
电子对抗直升机在执行任务时,通常需要对敌方的电磁波辐射源进行定位。双机协同定位是电子对抗直升机的一种主要工作模式,它采用交会定位的方法实时地完成对辐射源位置的确定[2-3]。然而,电子对抗直升机具有不同于地面侦察站的特点。由于受直升机结构的限制,除部分频段采用全向天线外,大多数侦察天线采用相控阵体制,安装在机身两侧具有一定的方向性,因此,与地面侦察站相比,存在有一些不同之处,目前的相关研究还比较少。
定位区域是进行侦察任务区域规划的主要依据,定位区域量化分析可以通过几何计算的方法完成[4-5],然而几何方法将不规则的区域进行划分计算的过程十分繁琐,因此,不便于进行过程分析。近年来图像处理技术发展十分成熟[6],可以借助此类技术实施对定位区的定量分析。
本文将对电子对抗直升机双站交会定位区进行研究,在第一部分构架起基本的侦察模型,得到有效定位区域,并研究双机协同侦察时的最佳站距;探讨如何计算有效定位区域的最大内接矩形,它是进行侦察任务区域兵力部署的基本依据;分析梯形编队侦察时的情况。通过仿真试验研究侦察定位的影响因素,并给出结论。
1 基本模型
电子对抗直升机的对象包括通信系统、指挥控制链路,以及对抗侦察战场侦察雷达、中近程野战防空雷达、直升机载火控雷达等目标。以直升机为载体更好地发挥出电子对抗“升空增益”,能大大提升侦察覆盖范围。
1.1 侦察范围
由于受载机载荷、安装位置和测向体制的限制,难以像地面雷达对抗侦察系统那样进行天线全方位扫描,因此,电子对抗直升机在飞行过程中难以侦收来自各个方向(方位覆盖360°)的信号。根据作战使用要求,电子对抗直升机一般是按预定的航线飞行,只需覆盖一定范围的信号即可满足作战需要。由装备的性能可知,电子对抗直升机的侦察天线安装在机身两侧,其在水平方向上的方位角覆盖范围为机身两侧ω,侦察范围如图1 所示。
图1 电子对抗直升机侦察范围Fig.1 Reconnaissance scope of electronic countermeasures helicopter
电子对抗直升机在进行电子对抗侦察时,侦察作用距离D 除了受辐射源发射信号功率约束外,还受地球曲率和气象条件的限制[7-8],这不是本文研究的重点,这里D 使用侦察设备标定的指标。
1.2 有效定位区
双机协同进行交会定位,是电子对抗直升机的重要工作模式。为使交会定位误差限定在可接受的范围内,通常取辐射源与两侦察站连线夹角在(30°,150°)区间,这个区域称之为可定位区域[9],如图2 所示。

图2 可定位区Fig.2 Positioning area
图中圆的半径为B,等于U1、U2两架直升机的距离,即站距长度,长弧线上任意一点与两站连线夹角为30°,短弧线与两站连线夹角为150°。由于区域以直升机轴线对称,在后文中只需分析一侧区域即可。有效定位区是可定位区与侦察双层覆盖区的重叠区域,图中ab1b2围成为的深色区域即有效定位区,如图3 所示。

图3 双机左侧有效定位区Fig.3 Effective positioning area on the left side of dual helicopters
有效定位区域的大小反映出侦察定位的能力。根据上文分析,这个区域的大小受站距B 和扫描角度ω 的影响。扫描角ω 在装备出厂时已经固定,因此,在作战运用中更多的是考虑两机间距B 的影响。计算区域大小时,可以将有效定位区域几何分解为几个容易计算面积的形状,这种方法具有解析解。然而,这种方法也存在一些不足:1)几何分解十分繁琐,不便于计算;2)不能保证遍历了所有情况,因为有效定位区是受多因素影响而呈现复杂变化的,因此,几何分解的方法不利于掌握和计算机仿真。为了方便仿真分析,本文将提出一种基于灰度图的方法。
2 算法描述及仿真
轮廓提取、区域标记等是比较成熟的图像处理技术[10],因此,可以方便地用来解决区域标定和面积计算问题。根据可定位区的确定方法,绘制出另一幅灰度图4(a),其中,白色区域为可定位区域。根据侦察距离D、扫描角度ω 和站距B 绘制出一个灰度图4(b),其中,白色区域为双层覆盖区域,对应图3 中ab1b2。将两幅图经行重叠,保证两幅图的相同侦察站对应重合。此时,图4(c)白色区域就是有效定位区域,而灰色和黑色区域均不能满足定位要求。
图4 定位区的灰度图Fig.4 Grey-scale images of positioning areas
根据灰度图的数据格式,黑色部分的分辨单元数值为0,白色部分的数值为1 代表图像的最小分辨单元,由此可以得到图4(a)和图4(b)的数据矩阵A、B,两个矩阵运算得到(A+B)/2,其中,元素为1 的部分所形成的区域就是图4(c)所示的有效定位区,通过计算矩阵非零元素,再结合与实际尺寸的比例关系就可方便得到区域面积。
按照这种模型进行定位区域的确定和分析,不需要繁琐的几何分解和数值计算,并且可以模拟所有参数渐变遍历的过程,不仅方便分析,而且避免出现各种情况考虑不全的情况。
2.1 最佳站距
有效定位区域的大小,直接影响着电子对抗侦察的效能,在战斗部署中要求有尽可能大的有效定位区,通常情况下存在一个最佳站距U1U2=Bmax,此时,协同侦察的效率达到最大化。下面根据本文算法,利用图像处理技术确定出双层覆盖区域和可定位区域。
以上两个区域的轮廓可以通过一些典型的边界点来确定,假设两站的间距为B,U1站和U2站的探测半径分别为D1、D2,两站的侦察扫描角度均为ω。此时的可定位区如图2 所示阴影部分,其边界包括短弧线U1U2和长弧线U1U2。U1点的坐标为(-B/2,0),U2点的坐标为(B/2,0)。长弧线U1U2以O1(0,B/2)为圆心,以B 为半径,绘制角度范围(-π/3,4π/3)之间的弧线,即可得到可定位区的边界;侦察双层覆盖区域也是由一些典型的边界点确定,分别以U1和U2为圆心,扇扫角度ω,得到两个电子对抗侦察站的扫描区,其中,ab1b2是扫描重叠区域,即双层覆盖区域;有效定位区域是可定位区与双层覆盖区的交集,如图4(c)所示,白色区域为有效定位区域,灰色区域不满足交集条件,因此,黑色区域同样不能对辐射源实施有效定位。
为了检验方法的有效性,下面估算不同站距部署情况下的有效定位区域。
1)D1=D2=D
通常情况下,有效定位区域受站距B 的影响存在3 种情况,如图5 所示,在ω=90°和ω=180°时,显示B≤0.5D,0.5D≤B≤D 和D≤B 3 种情况下的有效定位区域,在这个过程中,有效定位区面积先增大后减小,因此,在B∈[0,D]存在一个最佳站距Bmax,此时的有效定位区面积最大。

图5 有效定位区变化灰度图Fig.5 Variable Grey-scale images of effective positioning areas
研究两站取不同间距部署时,有效定位区域的变化规律。将其面积按照本文提出的方法进行仿真计算,并绘制出有效定位区面积与站距B 的关系曲线。图6 给出了ω 取(60°,90°,180°)时的对比图,可以看出有效定位区的面积随站距B 的增大先增大后较小,面积最大时对应的最佳间距Bmax分别为(0.506D,0.508D,0.597D)。对比发现,最佳站距随ω减小而减小,这是由双层覆盖区域减小造成。

图6 有效定位区面积变化曲线Fig.6 Area variable curves of effective positioning areas
2)D1=kD2,k>1
根据D1,D2与B 的大小关系,如图7 所示有效定位区会出现6 种情况,从侦察距离大小的角度考虑,即D1>2B 时,随着D2由大到小的变化,有3 种情况;B<D1<2B 时,随着D2由大到小的变化,有两种情况;D1<B 时,只有1 种情况。

图7 有效定位区(ω=180°,D1=kD2,k>1)Fig.7 Effective positioning area(ω=180°,D1=kD2,k>1)
同样分析在扫描角度ω 取(60°,90°,180°)时,不同情况下的最佳站距Bmax,此时的最佳站距分别为(0.759,0.764D2,0.896D2)。对比图6 和图8,发现有效定位区的面积有所扩大,这是由于U1站的探测能力增强,使总的有效定位区面积有所增大。
图8 有效定位区面积变化曲线(k=1.5)Fig.8 Area variable curve of effective positioning area(k=1.5)
2.2 最大内接矩形
在侦察装备兵力部署时,通常将任务区划分为规则的形状,比如矩形。因此,为研究部署问题,需要计算出有效定位区域的最大内接矩形。最大内接矩形划分是一个图形分割问题,在优化生产用料、土地利用等领域被广泛应用。文献[4]采用代数方法求解最大内接矩形,将矩形顶点使用二维坐标表示,并给出矩形面积的表达式,通过求解函数得到最大内接矩形的顶点坐标。这个方法给出解析解,但是计算过程复杂,并且不能保证遍历所有情况。本文不从过程入手,而直接对结果进行研究,保证能够遍历所有情况。
本文利用灰度图像素点的二值特性,提出一种更加直观、计算量小的图形切割方法,具体步骤如下:
1)取Bmax时的有效定位区的灰度图,其对应矩阵为X,有效定位区内的元素为1,如图9 所示;
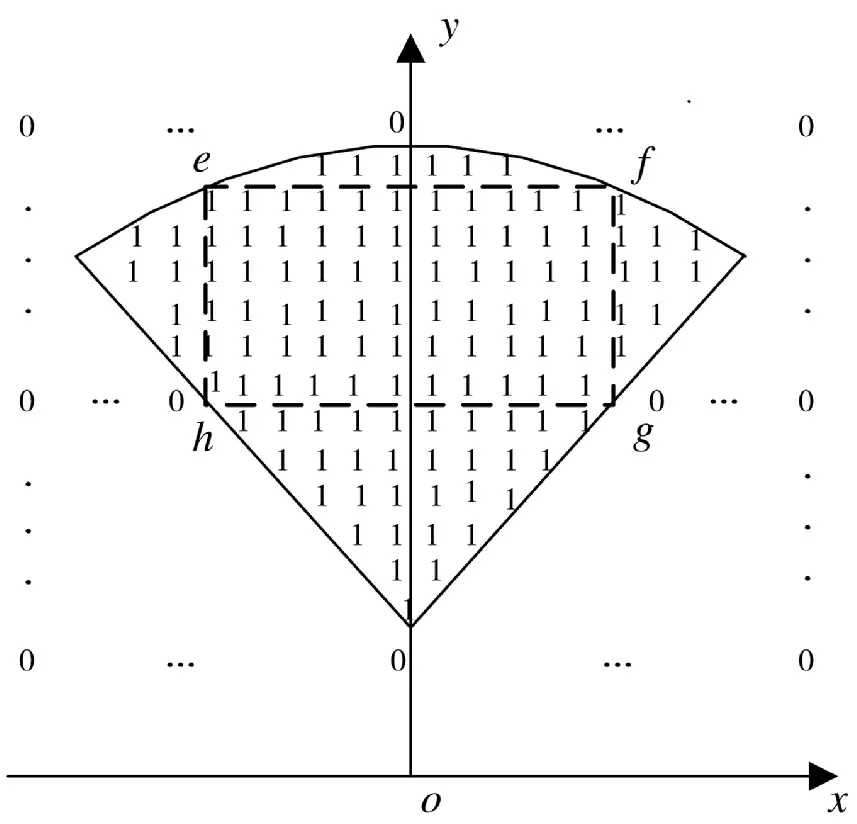
图9 有效定位区的矩阵表示Fig.9 Matrix representation of effective positioning area
2)提取有效定位区边界点坐标(xi,yi);
3)计算(xi,yi)所处行矢量、列矢量元素之和(Li,Wi),此二元数组分别对应矩形的长和宽,构成的矩形对应矩阵为Ai;
4)判断矩形是否内接于有效定位区:若Ai.*X=Ai,则矩形Ai内接于X,否则不是;
5)找到最大内接矩形。计算所有内接矩形Ai的面积,并进行排序,找到面积最大的一个矩形Amax,其对应的长宽为(Lmax,Wmax),即侦察部署的纵深和正面宽度。
当D1=D2=D=40 km,ω=90°时,按照以上算法计算有效定位区域内最大内接矩形的边长(Lmax,Wmax)分别为(18.08 km,16.16 km),4 个顶点e,f,g,h 的坐标分别为(-9.04,35.28)(9.04,35.28)(9.04,19.12)(-9.04,19.12)。表明此时双机定位的最大纵深为35.28 km,最小纵深为19.12 km,正面宽度为18.08 km。至此,根据需要侦察的任务区域和以上计算得到的参数,便可以对于电子战直升机进行兵力估算和部署。
2.3 编队协同
在执行协同侦察任务时,有时直升机的航向与连线重合形成线形编队,但是有时或主动调整队形或出现航向偏差[11],使得两直升机的航向与两机连线形成一个角度θ,如图10 所示,此时的定位区域也会发生变化。同样使用前文所提供的方法,分别构建双层覆盖区和可定位区模型,只不过在确定区域边界时,要考虑波束逆时针旋转了θ。

图10 梯形编队的有效定位区Fig.10 Effective positioning area of echelon
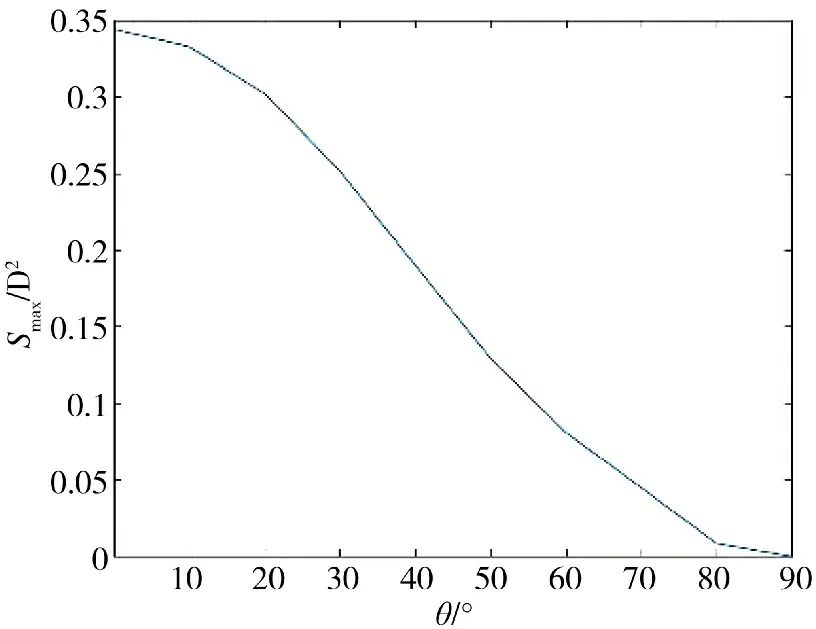
图11 最大有效定位区面积变化曲线Fig.11 Area variable curve of the largest effective positioning area
假设D1=D2=D,ω=90°,θ=0°~90°,绘制出最大有效定位区面积Smax与θ 的关系曲线。通过仿真结果可以看出,随着θ 增大,Smax逐渐减小,表明侦察效率在降低,这是由于随着θ 增大双层覆盖区在不断地减小。图中可以看到当θ=30°时,有效定位区面积已经减小约27%,并且随着角度的增加,定位效率急剧下降,在θ=90°时,已经无法进行协同定位。因此,编队飞行时,要综合可虑各种因素,合理控制θ 的大小。
3 结论
双机协同无源定位是执行空对地侦察的重要手段,也是新型电子对抗直升机的重要工作模式。本文借助图像处理技术设计算法,通过确定区域的边界点来明确有效定位区域,避免了繁琐的数值计算,并且可以保证各种情况的遍历。通过仿真分析得到以下结论:
1)相同性能的侦察装备执行协同定位时的最佳站距与扫描夹角正相关;
2)不同性能侦察装备协同侦察时,最佳间距和最大有效定位区面积都有所变化;
3)任务区域较大时,可以将其划分为规则矩形,以双机协同侦察为基础合理部署兵力;
4)编队形式影响侦察效率,要综合考虑战斗需求,合理选择队形,建议队形偏航角不大于30°。
本文提出的算法旨在更方便地进行模拟仿真,为后续的任务规划系统提供相应功能模块。虽然方法便于编程实现,但是在运算效率等方面仍需要进一步优化,以便在系统后续构建中得到更好的运用。
猜你喜欢
航天电子对抗(2023年1期)2023-10-05
现代装饰(2019年11期)2019-12-20
船舶标准化工程师(2019年4期)2019-07-24
航天电子对抗(2019年4期)2019-06-02
航天电子对抗(2019年4期)2019-06-02
铁道通信信号(2018年7期)2018-08-29
制造技术与机床(2017年4期)2017-06-22
电子制作(2017年23期)2017-02-02
舰船科学技术(2016年1期)2016-02-27
上海电机学院学报(2015年3期)2015-02-28