基于改进ADC 模型的车载激光末制导系统效能评估
2024-01-18 10:23季文龙王兆祥
火力与指挥控制 2023年12期
季文龙,高 飞,王兆祥,高 星,高 原
(1.解放军32184 部队,北京 100072;2.北方自动控制技术研究所,太原 030006)
0 引言
激光技术与制导技术的结合产生了多种制导体制的激光制导武器,其中,激光末制导因具备制导精度高、抗干扰能力强、战场配置灵活、结构简单、成本较低、通用性强的优点而得到了广泛应用。激光末制导的基本原理是:弹药飞行至其弹道末端时,使用激光目标指示器向目标发射经编码的激光波束并保持跟踪照射目标,弹上导引头根据目标反射的激光回波信息控制弹药命中目标[1]。目前,激光末制导主要以机载和单兵携带激光目标指示器进行照射为主,并开展了大量的效能评估研究[2-4]。为了提升联合火力打击能力,某战车首次集成了模块化的激光目标指示器,对其开展效能评估具有重要的实际意义。
武器系统效能是在规定环境条件下和规定时间内完成规定任务的程度或满足作战要求的概率[5-6],反映了武器装备在一定阶段的总体特性和水平,以及对军事上的有用程度。武器效能评估有多种方法,根据评估数据来源有实装试验、实战试验、模拟仿真、综合试验等方法;根据评估模型有ADC、SEA 等方法;根据计算类型有线性加权、模糊综合评判、层次分析、灰色评估等方法[7-8]。实际应用中,需要根据评估的对象和目的,以及武器装备特点及其用户对象,在可行性、有效性和可操作性等方面权衡,选择合适的评估方法。本文以应用广泛的ADC 方法为基础,在其基本模型上进行适应性改进,对集成在某战车上的激光末制导武器系统开展效能评估。
1 效能评估指标体系
ADC 方法本质上是对武器装备主客观因素的综合,将系统效能与系统可用度、可信度和能力之间的关系用数学关系表示,反映了武器系统状态随时间变化及其在作战使用过程中不同阶段的有效性,基本模型为E=ADC,其中,E 表示系统效能;A表示系统可用度;D 表示系统可信度;C 表示系统能力[9]。
某战车的激光末制导系统由引导分系统和通信分系统组成。引导分系统用于向目标发射编码激光并保持跟踪照射,通信分系统用于接收引导指令和上传目标信息。对某战车激光末制导系统效能的影响因素进行分析,并考虑到将激光目标指示器集成在战车上能够提升激光末制导系统及操作人员的战场生存能力。因此,在ADC 基本模型中增加了生存能力S,如图1 所示,其中,可用度A 和可信度D 由系统的可靠性、维修性确定;系统能力C 由引导能力和通信能力确定;生存能力S 由防护能力、机动能力和反侦察能力确定。
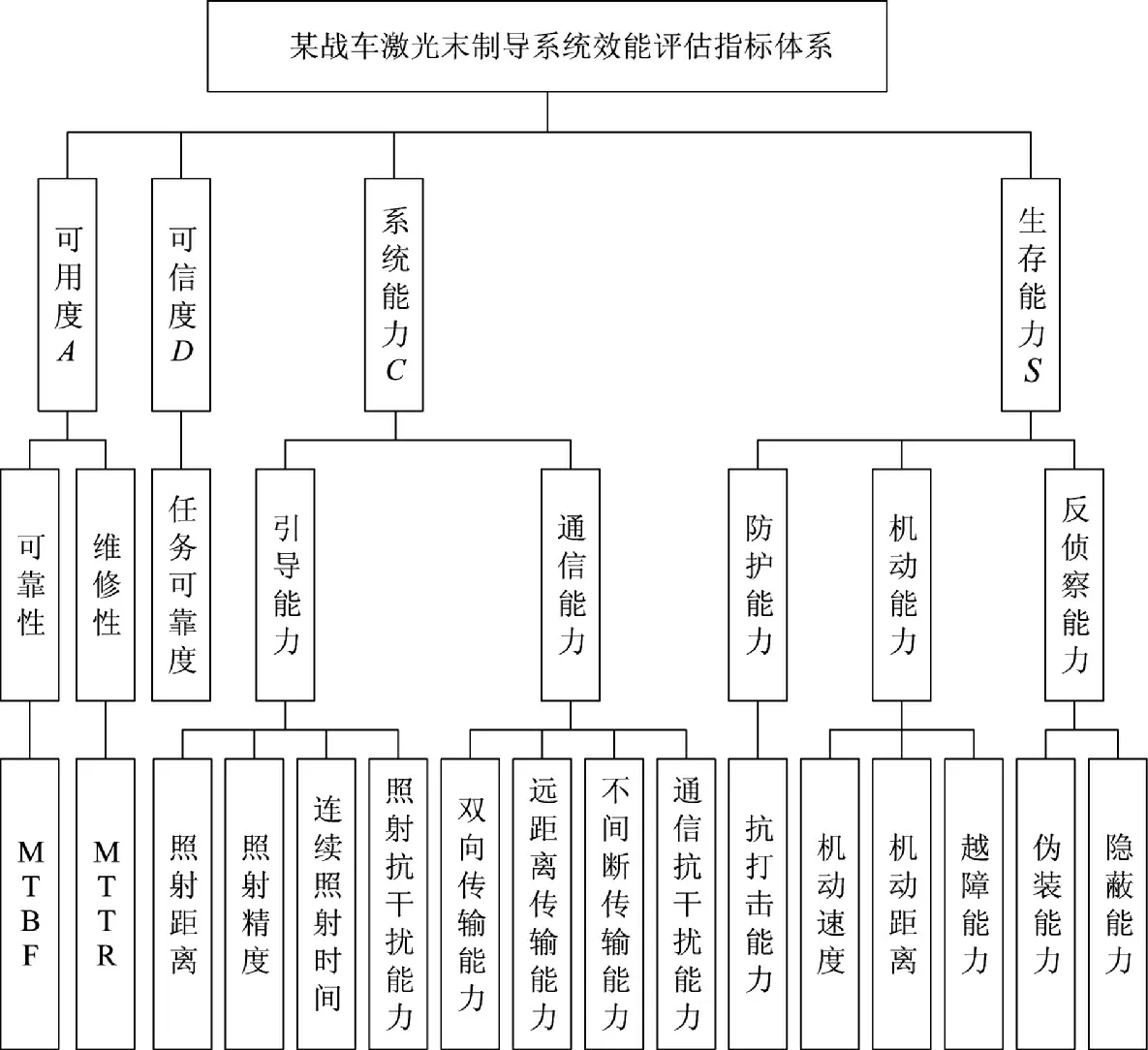
图1 某战车激光末制导系统效能评估指标体系Fig.1 Effectiveness evaluation index system of semi-active laser terminal guidance(SAL)weapon system mounted on a certain combat vehicle
2 效能评估模型
根据某战车激光末制导系统的效能评估指标体系,改进后的ADC 效能评估模型可表示为:
其中,E 为系统效能;A 为系统可用度向量,是系统在准备执行任务时可用程度的度量,反映了系统的战备状态;D 为系统可信度矩阵,是系统的可依赖程度,表示系统在使用过程中完成规定功能的概率;C为系统能力矩阵,表示系统在可用和可信状态下能够达到任务目标的能力度量;kS为生存能力系数。
2.1 可用度模型
在任务准备阶段,激光末制导系统的两个分系统——引导分系统和通信分系统都有“正常”和“故障”两种状态(假设除激光末制导系统外,战车其他系统工作正常),因此,共有4 种初始状态ai,如表1 所示。

表1 某战车激光末制导系统状态Table 1 State of semi-active laser terminal guidance(SAL)weapon system mounted on a certain combat vehicle
设MTBFY和MTTRY分别表示引导分系统的平均故障间隔时间和平均维修时间,MTBFT和MTTRT分别表示通信分系统的平均故障间隔时间和平均维修时间,则激光末制导系统的初始状态可用度向量A 表示为:
2.2 可信度模型
假设战车在执行任务过程中无法进行故障维修,即无法使各分系统由故障状态转换为正常状态,因此,可信度矩阵D 表示为4×4 上三角矩阵:
其中,di→j表示在执行任务时由初始状态ai转换到状态aj的状态转移概率。假定任务可靠度服从指数分布,则引导分系统和通信分系统的任务可靠度RY和RT分别表示为:
其中,t 表示执行任务时间。因此,引导分系统和通信分系统在执行任务过程中“保持正常”“由正常转换到故障”“保持故障”的概率可以分别表示为:
其中,Y 表示引导分系统;T 表示通信分系统;下标1→1 表示保持正常;1→0 表示由正常转换到故障;0→0 表示保持故障。
根据表1 所示的状态,可信度矩阵D 可以表示为:
2.3 系统能力模型
系统能力在很大程度上取决于系统执行任务的最后可能状态,是效能评估的关键,本文采用层次分析法和专家评分法相结合的方法构建系统能力矩阵C[10]。
1)建立评估因素集U
根据效能评估指标体系,建立系统能力的评估因素集U={U1,U2},其中,U1表示引导能力因素集,U2表示通信能力因素集。引导能力因素集U1再往下分可得U1= {U11,U12,U13,U14},U11、U12、U13、U14分别表示照射距离、照射精度、连续照射时间、照射抗干扰能力等底层因素。同理,通信能力因素集U2={U21,U22,U23,U24},U21、U22、U23、U24分别表示双向传输能力、远距离传输能力、不间断传输能力、通信抗干扰能力。
2)建立评判向量V
采取优、良、中、差4 级评价,评判集V=(0.95 0.85 0.65 0.5)T,其中,0.95、0.85、0.65、0.5 分别代表优、良、中、差的能力值。
3)确定底层因素的评价矩阵Vuij
采用专家评分的方法确定各底层因素Uij的评价向量,表示为:
其中,Vuij1、Vuij2、Vuij3、Vuij4分别表示底层因素uij属于优、良、中、差的概率。
4)确定各层级指标权重W
采用层次分析法确定各层级指标权重。对指标体系中各因素集内的因素进行两两比较,构造判断矩阵J:
其中,矩阵元素Jij的数值根据Saaty 标度法进行确定。求取判断矩阵J 最大特征值所对应的特征向量,即因素集的权重向量W。
为了确保求取的权重合理,需进行一致性检验:
当满足一致性检验时,即认为权重分配合理,否则重新调整判断矩阵时,其满足一致性检验。
5)计算一级分解指标的能力向量Bi
按照下面的公式计算一级分解指标Ui的能力向量Bi:
其中,Wi为指标Ui的权重;Wij为指标Ui的分解指标Uij的权重。
6)计算各系统状态下的能力向量
激光末制导系统共有4 种状态,除状态a1外,其他状态均存在故障,则各状态下的系统能力向量计算如表2 所示。
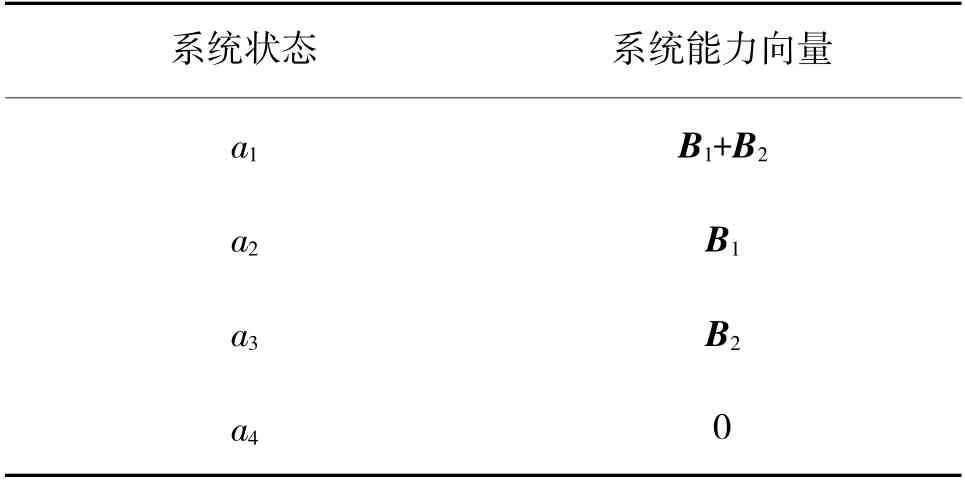
表2 某战车激光末制导系统能力向量Table 2 Capacity vector of semi-active laser guidance terminal(SAL)weapon system mounted on a certain combat vehicle
7)计算系统能力矩阵
设系统在状态ai时的能力向量表示为:
其中,B(ai)的各分量表示在ai状态下激光末制导系统能力分别属于优、良、中、差的概率。将B(ai)与评判向量V 相乘,即得到系统在ai状态下的能力均值Ci,并根据Ci构造系统能力矩阵C:
2.4 生存能力模型
生存能力模型的构建与系统能力模型类似,在计算得到生存能力的一级分解指标的各能力向量后,继续加权求和得到生存能力的能力向量BS,然后将生存能力向量BS与评价向量V 相乘,得到生存能力的综合评价分值,并将该分值作为生存能力系数kS。
3 模拟算例
3.1 模拟条件
在Mathematica 软件中编程,分别对集成在战车的激光末制导系统和单兵携带的激光末制导系统进行效能评估。
假设车载激光末制导系统与单兵激光末制导系统的系统组成相同,并且各分系统的可靠性和维修性指标相同,但是车载激光末制导系统的通信分系统性能指标要优于单兵激光末制导系统。设定引导分系统的平均故障间隔时间和平均维修时间为1 000 h 和0.5 h,通信分系统的平均故障间隔时间和平均维修时间为1 500 h 和0.5 h,执行任务时间为4 h。由专家根据系统性能指标参数对各指标进行评价打分(评价栏中“/”左侧为车载激光末制导系统的评分结果,右侧为单兵激光末制导系统的评分结果),并通过层次分析法得到各指标的权重,指标权重和打分结果如下页表3 所示。

表3 指标权重及评价向量Table 3 Index weights and evaluation vectors
3.2 可用度向量
根据式(2)~式(6),计算得到车载激光末制导系统和单兵激光末制导系统的可用度向量为:
计算结果表明,由于车载激光末制导系统和单兵激光末制导系统的可靠性指标较高,在开始执行任务时有99.9%的概率处于正常状态,可用程度高,战备状态十分良好。
3.3 可信度矩阵
根据式(8)~式(13),计算得到车载激光末制导系统和单兵激光末制导系统的可信度矩阵为:
计算结果表明,可信度矩阵的上三角元素数值很小,说明车载激光末制导系统和单兵激光末制导系统在执行任务过程中不易出现故障,可信程度高。
3.4 系统能力矩阵
根据式(17)和表3 中系统能力的指标权重和评价向量,计算得到车载激光末制导系统和单兵激光末制导系统的引导分系统、通信分系统能力向量为:
根据式(18)~式(19)及表2,计算得到车载激光末制导系统和单兵激光末制导系统的系统能力矩阵分别为:
3.5 生存能力系数
根据生存能力模型及表3 数据,计算得到车载激光末制导系统和单兵激光末制导系统的生存能力系数分别为:
3.6 系统效能
将式(20)~式(25)带入式(1),计算得到车载激光末制导系统和单兵激光末制导系统的系统效能分别为:
作为对比,在不考虑生存能力系数的情况下,车载激光末制导系统和单兵激光末制导系统的系统效能分别为ECZ=0.813 23 和EDB=0.794 82。
3.7 结果分析
在不考虑战场生存能力时,由于车载通信设备的性能一般优于单兵通信设备,因而车载激光末制导系统的效能一般略高于单兵激光末制导系统。计算结果表明,车载系统的效能比单兵系统的效能高出约2.32%。
当考虑战场生存能力时,由于战车能够为激光末制导武器和操作人员提供更多的防护,并且机动能力也有大幅提高,能够迅速从照射位置转移,因此,其战场生存能力明显高于单兵激光末制导系统,使其整体效能也明显高于单兵激光末制导系统。计算结果表明,车载系统的效能比单兵系统的效能高出约13.76%。
4 结论
针对首次集成在某战车上的激光末制导系统效能评估需求,本文构建了考虑战场生存能力因素的改进ADC 模型,该模型考虑了激光末制导的主要指标对其效能的影响,基于该模型进行效能评估具有较好的可操作性。此外,应用该模型并通过专家评分和层次分析法,对车载激光末制导系统和单兵激光末制导系统进行了效能评估对比,表明车载激光末制导系统的效能明显优于单兵激光末制导系统,评估结果具有一定的参考价值。
猜你喜欢
铁道通信信号(2020年8期)2020-02-06
科学与财富(2018年16期)2018-08-10
中国公共安全(2017年11期)2017-02-06
制导与引信(2016年3期)2016-03-20
电源技术(2016年2期)2016-02-27
中国卫生(2015年3期)2015-11-19
中国卫生(2015年8期)2015-11-12
电源技术(2015年2期)2015-08-22
导航定位学报(2015年2期)2015-06-05
中国卫生(2014年11期)2014-11-12