一种自适应变结构交互式多模型算法*
2024-01-18 10:23陈维义刘国强毛伟伟
火力与指挥控制 2023年12期
陈维义,何 凡,刘国强,毛伟伟
(1.海军工程大学兵器工程学院,武汉 430030;2.海军士官学校兵器系,安徽 蚌埠 230000)
0 引言
目前,卡尔曼滤波及其改进形式已经广泛应用在目标跟踪问题中。但是当目标机动十分复杂时,会出现滤波模型与目标机动模型不匹配的情况,影响目标跟踪精度[1-4]。针对这一问题,交互式多模型(interacting multiple model,IMM)展现出更加优越的性能[5-7]。正因为如此,IMM 算法受到了很多学者的关注,并在结构和参数等层面对IMM 算法进行了改进。文献[4]基于恒速和当前统计模型设计了IMM算法,该算法中,当前统计模型的平均速度通过最小二乘法估计得到,然后将当前统计模型应用于IMM 算法。该方法通过提高模型精度来提高滤波精度。文献[5]在多个层面对IMM 算法进行了改进,包括采用改进的卡尔曼滤波器作为子滤波器、不同模型之间的非对称状态估计和基于熵的模型概率更新公式。文献[3,6]提出了IMM 的一种替代方法,模型集中的模型都由匀加速模型构成,降低了模型集的复杂程度。在此基础上,文献[7]提出了一种自适应IMM 算法,首先利用滤波器对目标的加速度进估计,然后选取估计加速度附近的值构建模型,该方法可以减少模型集中模型的数量,在降低计算量的同时提高了模型精度。文献[8]基于二阶马尔科夫链提出了一种二阶IMM 算法,由于利用了更多的先验信息,进一步提高了滤波精度。由于上述IMM 的模型集中的模型种类和数量不变,所以又称为固定结构IMM(fixed structure IMM,FSIMM)。
为了避免因模型不匹配而造成的精度误差,在使用IMM 算法时,应使用尽可能多的模型覆盖目标机动模型。但值得注意的是,单个模型集中模型过多,同样会降低滤波精度[9]。在此背景下,变结构IMM(variable structure IMM,VSIMM)应运而生[14]。VSIMM 经过不断的发展和改进,大致可以分为4种:模型组切换(model group switching,MGS)、可能模型集(likely mode set,LMS)、期望模型增强(expected mode augmentation,EMA) 和自适应网格(adaptive grid,AG)[10-11]。其中,MGS 将模型集分成模型子集,一个时刻只会选中一个模型子集进行估计,模型子集之间根据模型子集转移概率进行切换[12]。LMS 在每个时刻模型都分为3 种类型:不可能的、重要的和主要的模型,每个时刻用于估计的模型子集由主要的模型和接近主要的模型构成[13]。与MGS 类似,EMA 将一个大的模型集分成小的模型子集,然后计算下一时刻所有模型子集的概率,选择概率最大的模型子集用于估计[9,14-15]。AG 算法结合图理论,将所有的模型构成一个网格,利用先验信息和当前数据得到一个局部细化网格,细化网格中的模型构成候选模型子集,然后根据规则选择模型构成下一时刻用于估计的模型子集。
值得注意的是,上述EMA 方法在计算似然函数和模型子集概率时,对公式进行了近似。针对这一问题,本文设计了一种新的VSIMM 滤波算法(novel VSIMM,NVSIMM),给出精确的数学模型。另外,EMA 将大的模型集分成小的模型子集时,为了降低计算成本,构建的模型子集并非所有模型的全排列组合。为了保证所有模型子集中存在与目标机动模式最匹配的模型子集,在已有模型子集的基础上,根据规则构建一个新的模型子集,从而得到了自适应VSIMM 算法(adaptive VSIMM,AVSIMM)。由于新的模型子集中的模型与目标机动模型最为匹配,可进一步提高目标跟踪精度。
1 交互式多模型算法
1.1 问题描述

系统离散化的状态方程如下:
其中,zk为量测向量,Hj为模型j 的测量矩阵,是均值为0 的高斯白噪声,其协方差矩阵为Rj。
基于上述状态方程、量测方程和贝叶斯理论,IMM 滤波算法根据量测集合和模型集Ω 估计系统k 时刻的状态xk。
1.2 IMM 算法
IMM 算法框图如下页图1 所示,一般可以分为以下4 个步骤[2-3]:

图1 IMM 算法框图Fig.1 Block diagram of IMM algorithm
Step 1 输入交互

Step 2 滤波
分别基于每一个模型进行卡尔曼滤波:
1)预测状态
2)预测协方差矩阵
3)卡尔曼增益
4)滤波
5)滤波值的协方差
Step 3 模型概率更新
模型概率更新公式为:


Step 4 输出交互
最终的状态估计和协方差估计:
2 自适应变结构交互式多模型算法
2.1 NVSIMM 算法
为了避免模型集中模型数量过多,提高模型精度,本节设计了NVSIMM 算法。NVSIMM 滤波算法包括多个模型子集,每个模型子集独立运行IMM,通过选取概率最高的模型子集的估计结果作为最终的估计状态输出[16-18]。NVSIMM 算法框图如图2所示,包括以下几个步骤:

图2 NVSIMM 算法框图Fig.2 Block diagram of NVSIMM algorithm
Step 1 并行独立IMM 状态估计
Step 2 计算每个模型子集的似然函数
模型子集的似然函数为:

Step 3 计算模型子集概率
Step 4 NVSIMM 滤波状态估计
选择概率最大的模型子集的IMM 估计结果作为最终的状态估计输出,首先求出概率最高的模型子集编号:
从而可以得到最终的状态估计和对应的协方差为:
2.2 AVSIMM 算法
假设NVSIMM 算法中模型子集中模型数量为L,若全排列组合可以得到CrL个模型子集,但为了降低计算成本,往往只需构造r-1 个模型子集即可覆盖所有的模型(记为原始模型子集)。但是这r-1个模型子集可能并非是与目标机动方式最为匹配的模型子集,为了在不过度增大计算量的情况下,提高模型子集的匹配性,下文在NVSIMM 的基础上,基于所有原始模型子集构建一个新的模型子集。基于新的模型子集和原始模型子集对状态进行估计,为AVSIMM 算法的主要思想[19-20]。AVSIMM算法包括以下几个步骤:
Step 1 并行独立IMM 状态估计
对所有的原始模型子集进行操作,具体内容与2.1 节Step 1 相同。
Step 2 计算每个模型子集的似然函数
对所有的原始模型子集进行操作,具体内容与2.1 节Step 2 相同。
Step 3 计算模型子集概率
对所有的原始模型子集进行操作,具体内容与2.1 节Step 3 相同。
Step 4 构建新的模型子集
根据下式寻找概率前L 大的模型子集:

Step5 并行独立IMM 状态估计
对所有的原始模型子集和新模型子集进行操作,具体内容与2.1 节Step 1 相同。
Step 6 计算每个模型子集的似然函数
对所有的原始模型子集和新模型子集进行操作,具体内容与2.1 节Step 2 相同。
Step 7 计算模型子集概率
对所有的原始模型子集和新模型子集进行操作,具体内容与2.1 节Step 3 相同。
Step 8:AVSIMM 状态估计
具体内容与2.1 节Step 4 相同。
3 仿真与讨论
为了验证AVSIMM 的有效性,针对两种目标机动情况展开分析讨论,这两种情况下,均假设目标在二维平面内运动(比如地面目标、海面目标或机动过程中高度变化较小的空中目标)。在第1 种情况下,目标为某空中飞行器,飞行高度变化较小,近似为平面运动。目标的初始位置、速度和加速度分别为(10 km,40 km)、(300 m/s,0)和(0,0)。该空中目标航迹规划后设置的机动参数如下:
1)30 s 的匀速直线运动;
2)30 s 的匀加速运动,加速度大小为(-10 m/s2,10 m/s2);
3)30 s 的匀速直线运动;
4)30 s 的匀速转弯运动,转弯角速率为0.2 rad/s;
5)30 s 的匀速直线运动。
第2 种情况下,目标为某地面车辆,目标的初始位置、速度和加速度分别为(300 m,100 m)、(5 m/s,0)和(0,0),该目标的机动参数如下:
1)20 s 的匀速直线运动;
2)20 s 的匀速转弯运动,转弯角速率为0.157 rad/s;
3)10 s 的匀加速运动,加速度大小为(-2 m/s2,0 m/s2);
4)10 s 的匀速转弯运动,转弯角速率为0.157 rad/s;
目标运动轨迹如图3 所示。利用蒙特卡洛法分析对比IMM、NVSIMM 和AVSIMM 的性能。其中,IMM 算法包括3 个模型:匀速直线运动模型(constant velocity,CV)、匀加速运动模型(constant acceleration,CA)和匀速转弯模型(constant turn,CT)[21-23]。AVSIMM 算法包括两个模型子集,第1 个模型子集包括CV、CA,第2 个模型子集包括CV、CT;NVSIMM滤波算法包括的模型子集和AVSIMM 相同。可以注意到,AVSIMM 和NVSIMM 仅需两个原始模型子集即可包括所有的模型,但这两种算法的原始模型子集并不包括模型子集CA、CT。设模型转移概率矩阵为:

图3 目标运动轨迹Fig.3 Target trajectory
假设过程噪声的标准差为1 m/s2,测量值通过雷达或GPS 等传感器得到,第1 种情况下转换成横纵坐标后的噪声的标准差为50 m,第2 种情况下的标准差为5 m,仿真结果如图4 ~图10 所示。
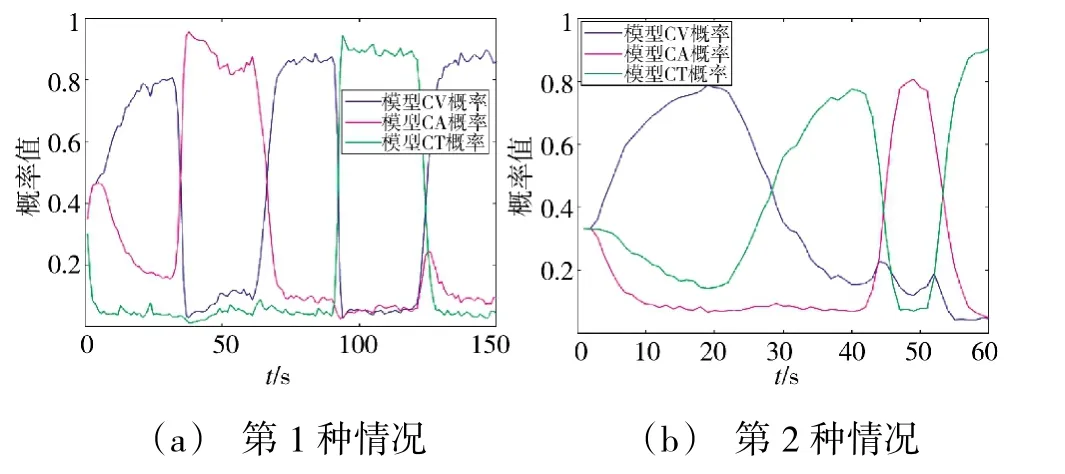
图4 IMM 中模型概率Fig.4 Model probability in IMM
图4 给出了IMM 中模型概率变化曲线,可以观察到最大概率所对应的模型与目标实际机动模型相同。图5 给出了NVSIMM 中模型子集概率的变化曲线,其中,概率最大的模型子集总是包括与目标实际机动模式相符的模型。从图6 中可以看出,AVSIMM 模型子集概率曲线与图5 大致相同。但是,对于第1 种情况而言,在区间(90 s,120 s),模型子集CACT 的概率最大,说明新的模型子集与目标实际机动方式最为匹配;对于第2 种情况而言,大约在区间(50 s,60 s),模型子集CACT 的概率最大,说明在此时间段新的模型子集与目标实际机动方式最为匹配。图7 描述了构建新模型子集的时刻,分析该图可以得到与图6 相同的结论。

图5 NVSIMM 中模型子集概率Fig.5 Model subset probability in NVSIMM

图6 AVSIMM 中模型子集概率Fig.6 Model subset probability in AVSIMM

图7 AVSIMM 中是否构建了新的模型子集CAVTFig.7 Whether a new model subset CAVT is constructed in AVSIMM
图8 给出了IMM、NVSIMM 和AVSIMM 对目标运动轨迹的跟踪效果,这3 种方法都能够对目标轨迹进行较好的估计,三者之间的差异具体体现在图9 中。图9 描述了IMM、NVSIMM 和AVSIMM 对目标位置估计的均方根误差曲线,从图中可以看出,在绝大多数时间里,NVSIMM 和AVSIMM 的均方根误差小于IMM,只有在目标机动模型改变的短暂时间里,NVSIMM 和AVSIMM 性能会降低,但是会立刻恢复。值得注意的是,NVSIMM 和AVSIMM 的性能非常接近,二者主要的区别体现在构建新的模型子集的时间段,第1 种情况下体现在区间段(90 s,120 s),第2 种情况下体现在区间段(50 s,60 s)。图10 单独对比了这两种情况下相应区间段AVSIMM和NVSIMM 的性能,从图中可以看出,AVSIMM 的性能优于NVSIMM,原因在于新构建的模型子集与目标实际机动模型更加匹配。

图8 目标轨迹跟踪效果Fig.8 Tracking effects of target trajectory

图9 位置跟踪的均方根误差Fig.9 Root mean square errors of position tracking
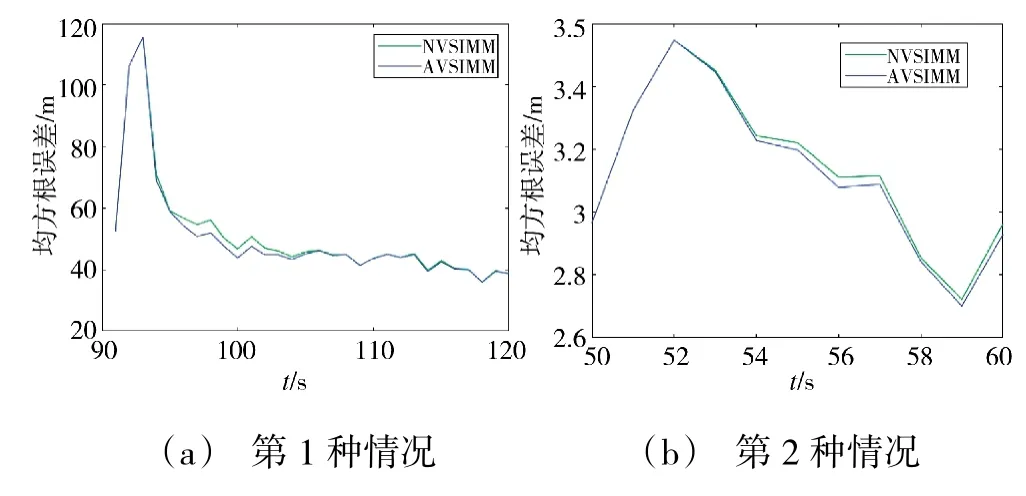
图10 位置跟踪的均方根误差Fig.10 Root mean square errors of position tracking
4 结论
为了进一步提高对机动目标的跟踪精度,本文设计了一种自适应变结构交互式多模型算法。建立了NVSIMM 的精确模型,在NVSIMM 基础上进一步改进,得到了AVSIMM 算法,该方法在原始模型子集的基础上,构建新的模型子集,可以在不过度增加计算成本的情况下,提高模型子集与目标实际机动模型的匹配程度,从而提高对目标的跟踪精度。通过与IMM 和NVSIMM 比较,AVSIMM 具有最好的跟踪效果。
猜你喜欢
语数外学习·高中版下旬(2023年7期)2023-09-25
安庆师范大学学报(自然科学版)(2021年1期)2021-11-28
装备制造技术(2020年3期)2020-12-25
南京大学学报(数学半年刊)(2020年1期)2020-03-19
当代陕西(2019年12期)2019-07-12
汉语世界(The World of Chinese)(2019年1期)2019-03-18
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
都市丽人(2015年4期)2015-03-20
电子设计工程(2014年20期)2014-02-27