煤矿综采支运装备浮动连接机构虚拟教学模型设计与实验
2024-01-19 06:21王学文李素华谢嘉成
黑龙江教育·理论与实践 2024年2期
关键词:实践教学
王学文 李素华 谢嘉成


收稿日期:2023-04-27 修回日期:2023-06-14
作者简介:王学文,男,教授,博士生导师,博士,研究方向为煤机装备设计理论与信息化技术;李素华,女,博士研究生,研究方向为煤机装备设计理论与信息化技术;谢嘉成,男,副教授,博士,研究方向为煤机装备设计理论与信息化技术。
基金项目:教育部产学合作协同育人项目“矿用机器人及智能装备虚实融合创新实践平台建设”(221003940061013)、“基于数字孪生的煤矿井下多功能机器人系统研究”(221003940061228);中国高等教育学会高等教育科学研究规划重点课题“面向煤机特色机械专业虚实融合实践教学的数字模型资源库建设与应用”(22SZH0306);中国学位与研究生教育研究重点课题“利用虚拟现实系统提高机械工程专业学位研究生实践能力的模式与实践”(2020ZDA12);山西省高等学校教学改革创新项目“煤机装备数字孪生实践教学应用系统开发与教学实践”(J20230254)
摘 要:综采支运装备浮动连接机构是煤矿综采装备教学的难点和重点,虚拟教学模型是完成专业实验与实践教学的重要手段。文章基于机构运动分析,建立了综采支运装备浮动连接机构简化模型;通过建立虚拟装备模型和虚拟煤层底板模型,并基于虚拟接触关系与虚拟控制模型,实现了综采支运装备虚拟浮动连接和虚拟协同推进;以此为基础,设计了综采支运装备虚拟调直教学实验系统,描述了实验过程。虚拟教学模型可以有效支持教师对专业实验的设计,加强学生对专业实验的深度理解。
关键词:虚拟教学模型;实践教学;专业实验;综采装备
中图分类号:G644 文献标识码:A 文章编号:1002-4107(2024)02-0054-03
一、引言
煤机装备及其应用场所(煤矿)实验环境差、实验安全性难以保障,而煤机装备虚拟教学模型可以在远离危险生产环境下,顺利完成虚拟认知[1]、虚拟操作[2]、虚拟实验[3-4]等环节,为煤机特色机械工程专业学生完成实践与实验教学提供安全保障。文章针对煤矿综采装备教学中的难点和重点内容——综采支运装备浮动连接机构,进行虚拟教学模型设计,并通过具体实践教学,有效支持教师对专业实验的设计,提高实验效率,改善实验环境,提升实践教学效果。
二、综采支运装备浮动连接机构
在综采工作面中,液压支架主要负责对煤层顶板进行支护,将采空区与开采区进行隔离,确保开采环境安
全,同时负责采煤机与刮板输送机的推进。刮板输送机是综采工作面的运输设备,主要负责煤炭物料的运输,同时是采煤机的行走轨道与液压支架进行移架时的支点。文章将液压支架和刮板输送机简称为“综采支运装备”。
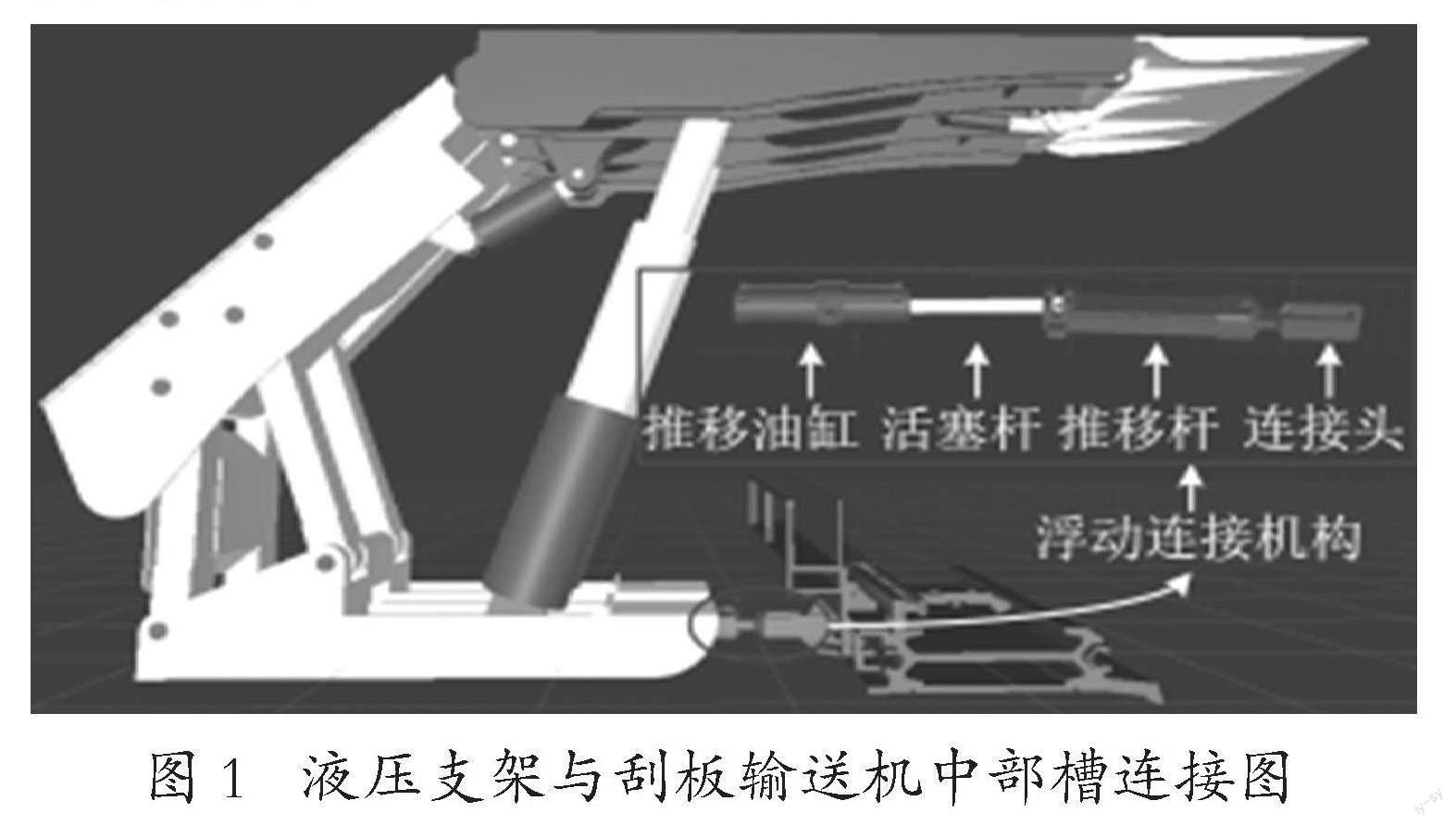
液压支架推移机构是将综采支运装备进行连接的浮动机构,简称为“浮动连接机构”,其主要组成部分包括推移油缸、活塞杆、推移杆、连接头。其运动包括活塞杆的伸长、推移杆的俯仰运动和偏航运动、连接头的偏航运动等,如图1所示。
三、机构运动分析
(一)機构简化模型
在机器人运动学中,用位移量、横滚角、俯仰角、偏转角,以及角度间的组合来描述机器人的运动姿态[5]。如图2所示,选取推移油缸为基座,将连接头的运动简化为末端执行器绕着手腕处的偏转运动,连接头与推移杆连接的销轴简化为具有偏航运动的旋转关节,活塞杆与推移杆之间的连接销轴简化为机器人具有偏航运动与俯仰运动的旋转关节,推移油缸与活塞杆简化为机器人的棱柱关节。
(二)机构运动解析
将获得的运动规律赋予虚拟液压支架,在刮板输送机推移耳座内标记关键点作为机械手模型末端执行器的最终位置;通过刮板输送机上标记的关键点位置确定推溜点与移架点;根据推移杆和连接头是否与液压支架底座、刮板输送机推移耳座相干涉确定最优解。确定推溜点和移架点的位置后,使浮动连接机构按一定行程推移,虚拟环境下浮动连接机构的姿态运动与实际环境下保持一致,即表明选择的运动规律合理。
四、建立虚拟模型
(一)支运装备模型
在UG软件中进行等比例建模、运动关系装配及相关的参数配置后,将其以STL格式导出后导入3DMax,再次进行格式转换及模型比例的设置,得到可导入Unity3D虚拟仿真引擎的FBX格式的三维模型[6]。
(二)煤层底板模型
如图3所示,利用UG软件中逆向工程模块,对煤层底板进行建模[7]。将若干数据点导入UG软件,此时数据点在UG坐标系下按照既定顺序形成煤层底板,通过UG软件中的逆向工程模块,将煤层底板数据点云通过参数化对数据进行拟合;基于章节(一)模型转换思路,完成虚拟煤层底板模型构建。
五、虚拟浮动连接
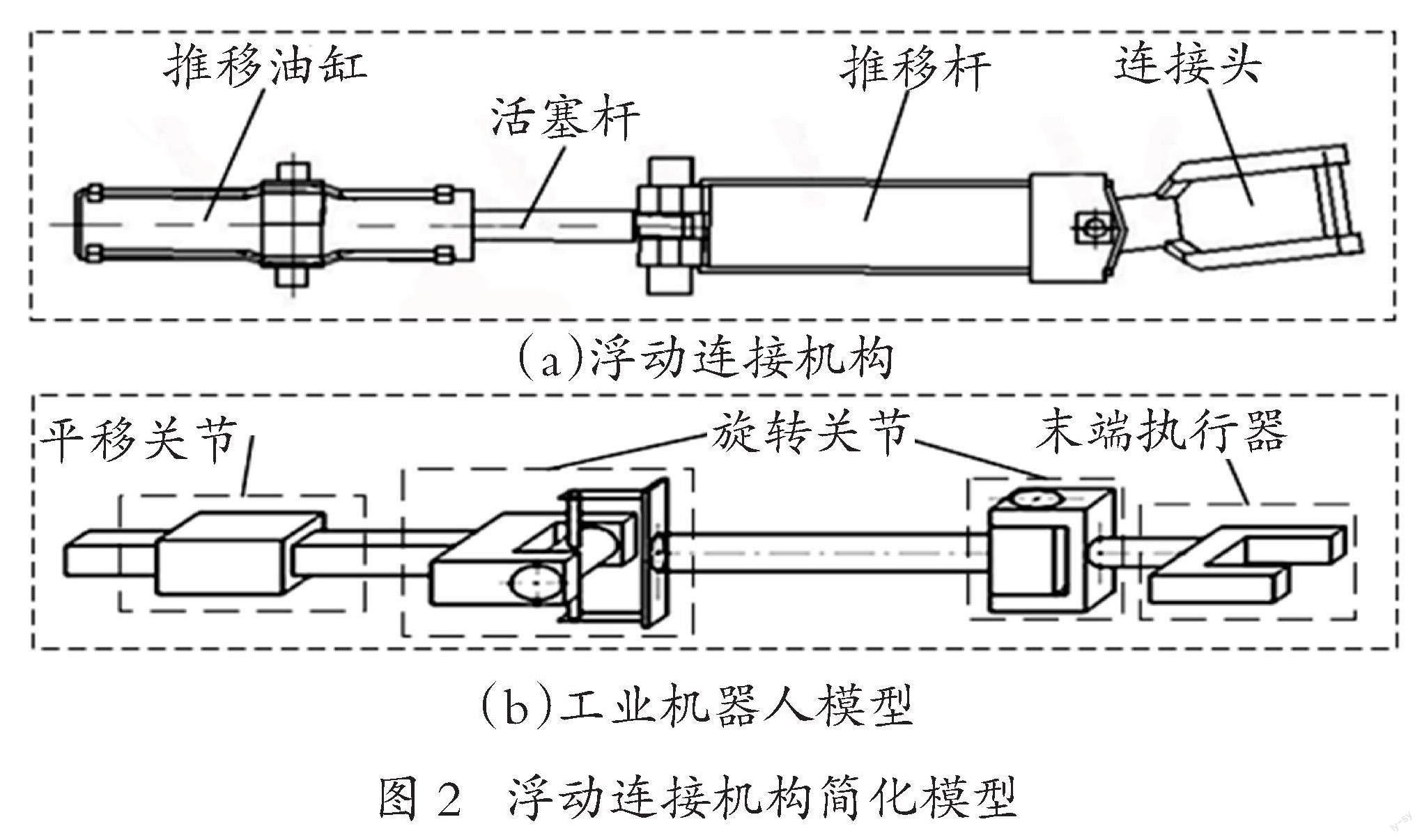
(一)建立虚拟物理关系
Unity3D中的物理引擎组件可实现虚拟模型的物理关系约束建立[8]。如图4所示,在虚拟煤层底板上安装
Mesh Collider 组件,依次在刮板输送机中部槽、液压支架群上安装Rigidbody组件及若干Box Collider组件,在刮板输送机铲煤板边缘安装Capsule Collider组件,由此建立了支运装备与煤层底板间的虚拟接触模型。
(二)实现虚拟连接
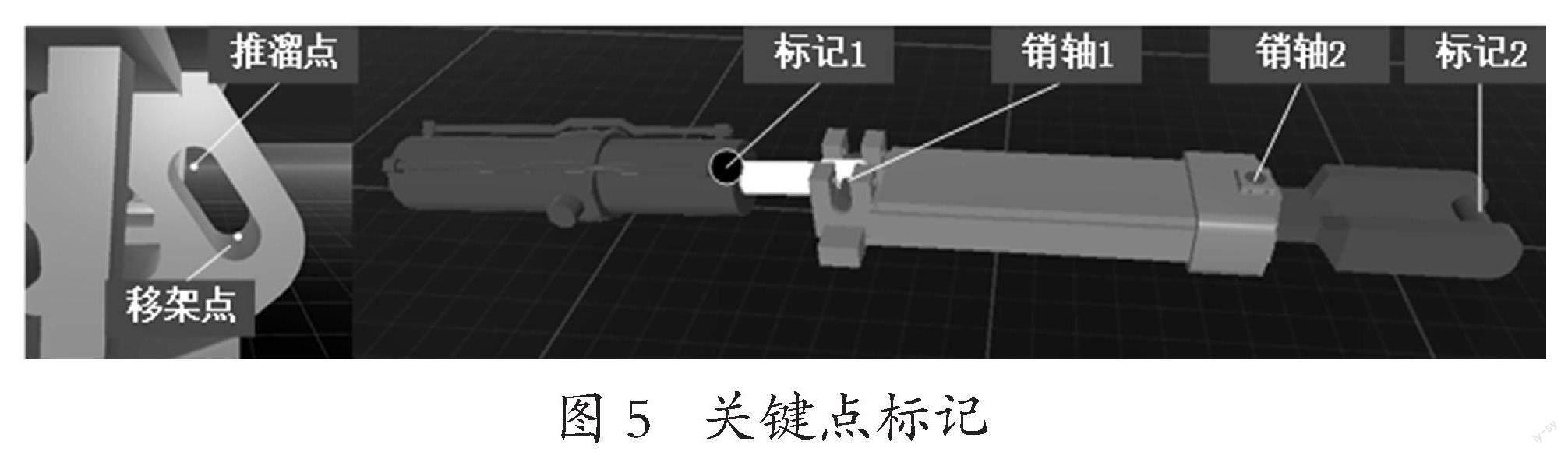
1.设置浮动连接机构等价机械手模型关键点
如图5所示,在推移机构推移油缸与活塞杆交接处以“标记1”作为机械手模型基座的虚拟映射,将其余旋转关节用系列销轴进行标记,末端执行器捕捉位置通过在连接头连接处中心位置的“标记2”进行虚拟映射;液压支架移架时,末端执行器捕捉 “移架点”处的关键点;液压支架推移刮板输送机时,末端执行器捕捉“推溜点”处的关键点。
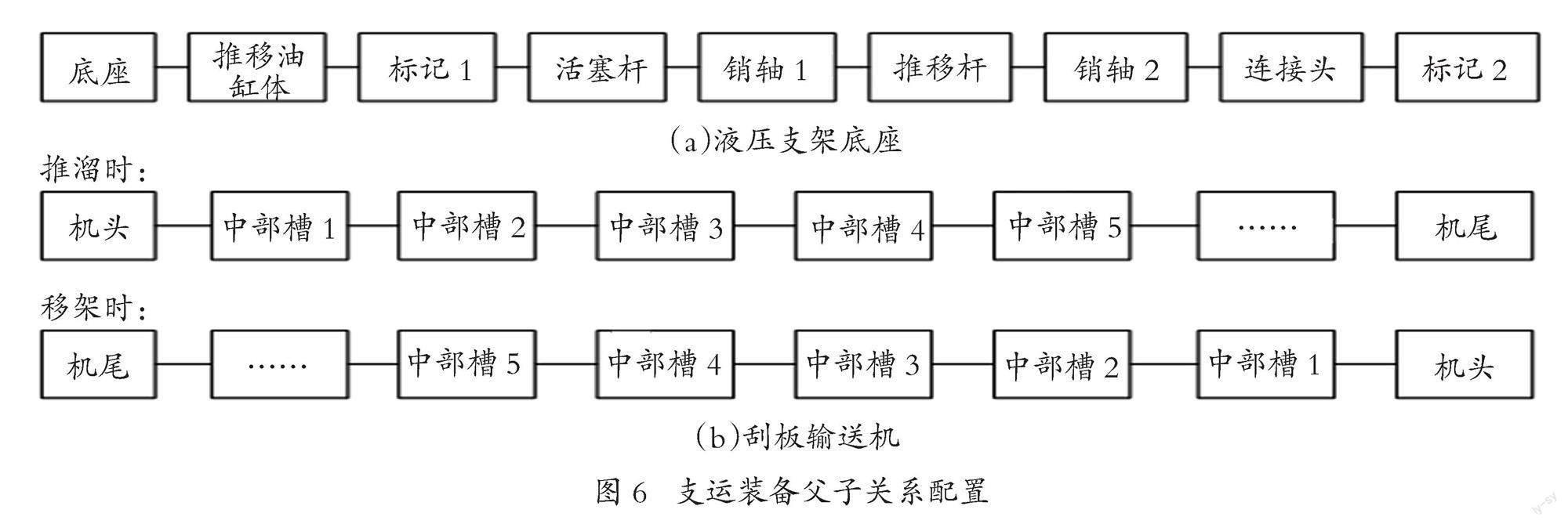
2.建立支运装备父子关系
液压支架移架时会带动整个支架的运动,液压支架推移时会使刮板输送机的位姿发生变化。为了实现以上过程,按照图6所示,在虚拟环境下对液压支架底座和刮板输送机的父子关系进行配置。
六、虚拟协同推进
(一)刮板输送机弯曲
采煤机在初始阶段时处于机头或者机尾位置,在该位置一定距离内的刮板输送机处于弯曲状态。根据采煤机运行轨迹,将其轨迹反演至刮板输送机上,根据轨迹的弯曲情况确定各节中部槽的弯曲角度,通过预定义的脚本形式表示,通过函数命令控制各节中部槽的转动,实现刮板输送机虚拟环境下“S”形弯曲姿态。
(二)液压支架推移
在每台液压支架上安装相应控制脚本作为虚拟模型的驱动部分,通过函数命令分别控制液压支架的推溜与移架过程。在Rigidbody、Collider物理引擎与脚本的控制下,基于浮动连接机构的运动规律,实现液压支架推移过程。移架后状态如图7所示。
(三)虚实结合协同推进
选取液压支架底座和刮板输送机为对象,在物理引擎的作用下,支运装备自适应铺设在虚拟煤层底板上;基于浮动连接机构的运动规律,液压支架推移机构在脚本控制下自动捕捉相应中部槽上的关键点,将刮板输送机推移成既定姿态,液压支架随后移架,实现虚拟支运装备协同推进。
图8为支运装备浮动连接实体教学模型,该教学模型在保留液压支架推移框架结构的前提下进行实际装备结构的简化,保留实际支运装备推溜、移架功能,面向学生对比介绍实体教学模型与实际装备间的关系及使用原理,有利于培养学生对专业装备的认知能力。
同时,在虚拟环境下建立实际支运装备的虚拟模型,通过虚实结合方式协同推进,可针对活塞杆伸长量、推移杆偏航角、推移杆俯仰角、连接头偏航角4个参数进行对比分析。
七、虚拟调直教学实验
(一)虚拟调直实验总体方案
如图9所示,初始状态时,液压支架与刮板输送机均进行对中处理,液压支架推移机构在静止状态下与刮板输送机推移耳座在一条直线上,液压支架推移刮板输送机,此时刮板输送机弯曲成既定姿态;实时获得浮动连接机构目标位置与推移油缸体的相对位置差后,液压支架群移架;液压支架以前一刀刮板输送机预测的轨迹为依据,推移刮板输送机;推移完毕后,液压支架移架,此时液压支架群直线度不满足要求;调整液压支架的位置,使综采支运装备具有较好的直线度。
(二)虚拟调直教学系统及功能
设计“煤层+支运装备”的联合虚拟调直教学系统的操作界面如图10所示。点击“开始”按钮,液压支架推移刮板输送机;点击“移架”按钮,液压支架群移架;点击“调直”按钮,液压支架以前一刀刮板输送机预测的轨迹为依据进行推溜;再次点击“移架”按钮,液压支架移架,此时液压支架群不满足直线度要求;点击“调整支架”按钮,通过对液压支架的位置进行调整实现对液压支架群的直线度调整;点击“刮板输送机数据”按钮,可以将刮板输送机各中部槽的位置以XML文件格式实时输出;点击“底板起伏+”按钮,触发一次可实现底板凸起20 mm;点击“底板起伏-”按钮,触发一次可实现底板下陷20 mm。
八、结束语
文章先分析了综采支运装备浮动连接机构空间运动模型,对其运动规律进行了解析,为虚拟教学模型设计提供了依据;其次,建立了虚拟支运装备模型和虚拟煤层底板模型,通过建立虚拟物理关系,构建了虚拟接触模型;再其次,通过设置浮动连接机构等价机械手模型关键点、建立液压支架与刮板输送机父子关系,以及构建浮动连接机构的虚拟控制模型,完成了综采支运装备虚拟浮动连接,并实现了综采支运装备虚拟教学模型协同推进;最后,设计了综采支运装备虚拟调直教学实验系统,完成了“综采支运装备+煤层底板”联合虚拟调直教学实验过程设计。总之,虚拟教学模型可以展示连续性动作,可以重复观看和操作。通过虚拟教学模型,学生可以直观地观察装备结构、工作状态及成套装备的相互配合,加深对专业实验的深度理解。
参考文献:
[1] 张远翼,张鹰,刘淑虎,等.虚拟环境下的中国古建筑
大木构件认知实验研究[J].实验技术与管理,2022,
39(3):80-84.
[2] 姚红伟,张建琪,温镇,等.基于模拟状态信息的虚拟
操作场景重构及微电网自适应控制设计[J].电机与
控制应用,2022,49(10):77-85.
[3] 茹婷婷,金石.“虚拟实验微课程”在“物理化学实验”
教学中的应用研究:以“蔗糖水解反应动力学”实验
为例[J].黑龙江教育(理论与实践),2022,76(2):
76-77.
[4] 卓莉,万里.基于Unity3D的液塑限含水率虚拟实验
设计与实现[J].实验科学与技术,2022,20(5):29-34.
[5] JAZRA R N. Theory of applied robotics: kinematics,
dynamics, and control[M]. Berlin: Springer Publishing
Company,2010:124-155.
[6] LI J L, LIU Y, XIE J C, et al. Cutting path planning
technology of shearer based on virtual reality[J]. App-
lied sciences,2020(10):771.
[7] 谢嘉成,王学文,杨兆建,等.综采工作面煤层装备联
合虚拟仿真技术构想与实践[J].煤炭科学技术,
2019,47(5):162-168.
[8] INDRAPRASTHA A, SHINOZAKI M. The investi-
gation on using Unity3D game engine in urban design
study[J]. ITB journal of information and communica-
tion,2009,3(1):1-18.
■ 編辑∕丁俊玲
猜你喜欢
考试周刊(2016年79期)2016-10-13
考试周刊(2016年79期)2016-10-13
大学教育(2016年9期)2016-10-09
大学教育(2016年9期)2016-10-09
大学教育(2016年9期)2016-10-09
大学教育(2016年9期)2016-10-09
大学教育(2016年9期)2016-10-09