
基于超螺旋二阶滑膜的汽车主动悬架控制方法研究
2024-01-26 09:18文淑容
机械设计与制造 2024年1期
周 向,文淑容
(1.武汉交通职业学院,湖北 武汉 430070;2.湖北省产品质量监督检验研究院,湖北 武汉 430061)
1 引言
随着经济的发展和人们生活水平的不断提高,人们对汽车行驶的稳定性和舒适性提出了更高的要求[1]。主动悬架系统能够产生适合道路振动和车身姿态的实时控制力,为车辆提供最佳的减振和行驶条件而被广泛应用。主动悬架系统和被动悬架系统的主要区别在于加装了作动器,其控制性能直接影响汽车乘坐的稳定性和舒适性[2]。
目前,汽车主动悬架控制方法的研究受到国内外众多研究者的关注。出现了PID控制策略、滑膜控制策略、LQG控制策略等多种控制策略。在文献[3]中,提出了一种基于量子粒子群优化的主动悬架分数阶控制策略。结果表明,与整数阶主动悬架和被动悬架相比,采用分数阶控制器的主动悬架显著提高了车辆的稳定性和舒适性。在文献[4]中,基于双横臂悬架的四分之一车辆模型,提出了一种使用干扰观测器的滑模控制方法,以降低弹簧质量振动为目标。结果表明,带干扰观测器的滑模控制器能获得较好的控制效果。在文献[5]中,提出了一种基于粒子群优化的模糊PID控制器用于半主动悬架控制。结果表明,与传统控制方法相比,采用该方法控制的悬架系统的性能得到了显著改善。在文献[6]中,提出了一种LQG控制算法和遗传算法相结合的主动悬架控制方法。结果表明,与传统控制方法相比,该方法的主动悬架系统具有更好的平顺性和乘坐舒适性。然而,实际道路激励种类繁多,易受外界干扰,控制效果较差。因此,有必要进一步提高汽车悬架系统的抗干扰能力和自适应能力。
在此基础上,提出了一种基于超螺旋二次滑模控制的车辆主动悬架控制方法。控制器前端连接负加速度反馈回路以调节悬架性能,并使用扩展超螺旋观测器实时校正系统的未知内部动态。通过仿真进行了对比分析。
2 1/4主动悬架模型
汽车的整体机械结构非常复杂,如果建立车辆模型,其研究和分析将变得非常复杂,这对研究非常不利[7]。
考虑到车辆结构的对称性,对汽车二自由度1/4主动悬架模型进行建立,如图1所示。1/4主动悬架模型参数,如表1所示。

表1 参数说明Tab.1 Parameter Description

图1 1/4主动悬架模型Fig.1 1/4 Active Suspension Model
根据动力学理论,得到系统的动力学方程,如式(1)所示。
定义系统状态变量[8],如式(2)所示。
式中:x1—车身悬架行程,通过线性差动变压器测量。
在实际主动悬架系统中,存在参数扰动和建模未考虑动态,应进行补偿,悬架的质量参数ms、mu及内部动态Fs、Fd、Ft、Fv、Fb是未知的。将式(2)转换为式(3)。
式中:f—未知内部动态的总和;b—名义值(无负载)。
未知内部动态的总和f,如式(4)所示。
f包括轮胎力、电磁力、输出力、悬挂力等[9]。在设计中,应设计观测器进行补偿。文中设计了超螺旋观测器来补偿未知动态,并满足有限时间收敛特性。
3 主动悬架控制器设计
提出了一种基于超螺旋二次滑模控制的汽车主动悬架控制方法。控制器前端串联一个负加速度反馈回路来调节悬架性能,并利用扩展超螺旋观测器实时校正系统的未知内部动态。
3.1 控制律设计
根据式(3)定义一个新状态z1=x1-xr。xr为待设计的参考轨迹。可以得到式(5)的STS方程[10]。
式中:uh—待设计的控制律。
对式(6)进行求导可以得到式(7)。
显然,当s==0,式(5)可以变换为式(8)。
引入同质性理论确保上述积分链在有限时间内收敛到平衡点[11]。对于式(8),选择正参数c1,c2,d1,d2,使p2+c2p+c1和p2+d2p+d1为赫维茨多项式。如果控制律满足式(9),系统的状态在有限时间内收敛到平衡点。
3.2 观测器设计
由于存在扰动f,二阶滑模控制器不能直接使用[12]。为了解决这一问题,文中提出了一种扩展的超螺旋观测器进行补偿。
定义一个增广状态d=f,如式(10)所示观测器来估计系统的状态量[13]。
结合上述可得系统的误差动态[14],如式(11)所示。
显然,ρ2是全局有界的。即|ρ2|≤δ2+δ3|es|,其中δ3为任何正参量。αi(i=1,2,3,4)为设计的观测增益。
基于改进的超螺旋算法,得出以下结论[15]。
如果误差在有限时间内收敛到0,αi满足式(12)。
所设计的观测器可以确定ed为消失量,可通过补偿f。
3.3 滑膜控制器设计
根据式(7),滑模控制律如式(13)所示。
带入式(7)可得式(14)所示。
其中,ρ1=-ed。
因为ed为消失量,即|ρ1|≤δ1|s|。其中δ1为正参数。根据式(14)可以得出以下结论。
如果s==0在有限的时间内可达,βi满足式(15)[16]。
因为ρ1为消失量,所以=0最终可达。当s==0,主动悬架由同质控制率控制,车身可以按照参考轨迹进行运动,并且可以通过参考轨迹调整所需的性能[17]。
3.4 约束分析
以悬架行程作为控制量,提出了一种基于负加速度反馈的参考轨迹[18](调整悬架的动态行程和加速度),如式(16)所示。
式中:ωc—截止频率—非弹簧质量加速度,由加速计测量。
由于z1在有限时间可以收敛到0,基于有限时间收敛特性,x1频率响应曲线与xr频率响应曲线相等。
通过将滑模控制规则式(13)代入式(1),应用条件为-=,可以得到式(17)的零动态。
为了便于比较和分析,线性被动悬架系统的动态,可得:
显然,对于有界道路扰动和SRM 垂直力,||d||有界。根据STS式(17)和有限时间响应特性,可以得到不同截止频率下车身垂直加速度和悬架动态行程的频率响应曲线[19]。为了调整截止频率,选择平滑函数,如式(19)所示。
式中:γ—安全阈值,这里选择γ=0.6。
4 仿真结果与分析
4.1 参数设置
为了测试文中所提的主动悬架控制方法的性能,采用联想PC作为仿真设备,Windows 10 64位旗舰操作系统,Intel i52450m CPU,2.5GHz频率,8GB内存[20]。在Matlab/Simulink 中建立了系统的不确定性模型。悬架各元件的参数,如表2所示。控制器和观测器参数,如表3所示。

表2 悬架相关参数Tab.2 Suspension Related Parameters

表3 控制器和观测器参数Tab.3 Controller and Observer Parameters
4.2 仿真分析
为了验证该方法的优越性,将该方法与被动悬架控制系统和传统的一阶滑膜控制器进行了比较。不同控制方法在路面和SRM垂直力共同干扰下悬架弹簧质量的垂直位移曲线,如图2所示。不同控制方法路面和SRM垂直力共同干扰下悬架弹簧质量的加速度曲线,如图3所示。

图2 不同控制方法下簧载质量的垂直位移Fig.2 Vertical Displacement of Sprung Mass Under Different Control Methods
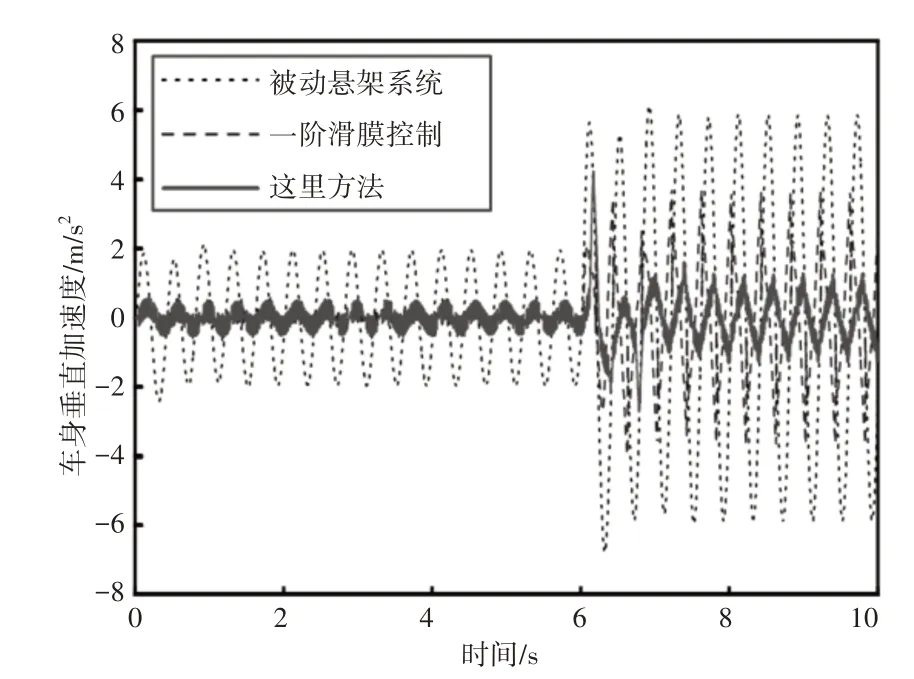
图3 不同控制方法下簧载质量的垂直加速度Fig.3 Vertical Acceleration of Sprung Mass Under Different Control Methods
从图2、图3可以看出,相比于一阶滑膜控制和被动悬架,文中方法具有很强的抗干扰性能,为具有未知内部动态的悬架提供了强大的自适应性能。
这是因为在传统的一阶滑模控制中,抖振直接作用在控制力和加速度上。而这里所提方法是采用参考轨迹控制,具有响应快速、加速度低等优势。
不同控制方式下截止频率的变化曲线,如图4所示。不同控制方式下悬架行程的变化曲线,如图5所示。

图4 不同控制方法下截至频率变化Fig.4 Cut-off Frequency Change Under Different Control Methods

图5 不同控制方法下悬架行程变化Fig.5 Suspension Stroke Changes Under Different Control Methods
从图4、图5可以看出,与一阶滑膜控制相比,该方法能在短时间内更好地调整截止频率和悬架行程,避免机械部件的碰撞和损坏。这是因为轮胎刚度大,可以近似为刚体。
所以当车身位移为0 时,悬架的动态行程约等于道路的垂直位移,一阶滑膜控制不能保证实际约束。而这里所提方法是通过调节截止频率,软调节悬架的动态行程和加速度,实现多目标控制。
不同控制方法下总干扰估计对比,如图6所示。不同方法下主动控制力的响应情况,如图7所示。
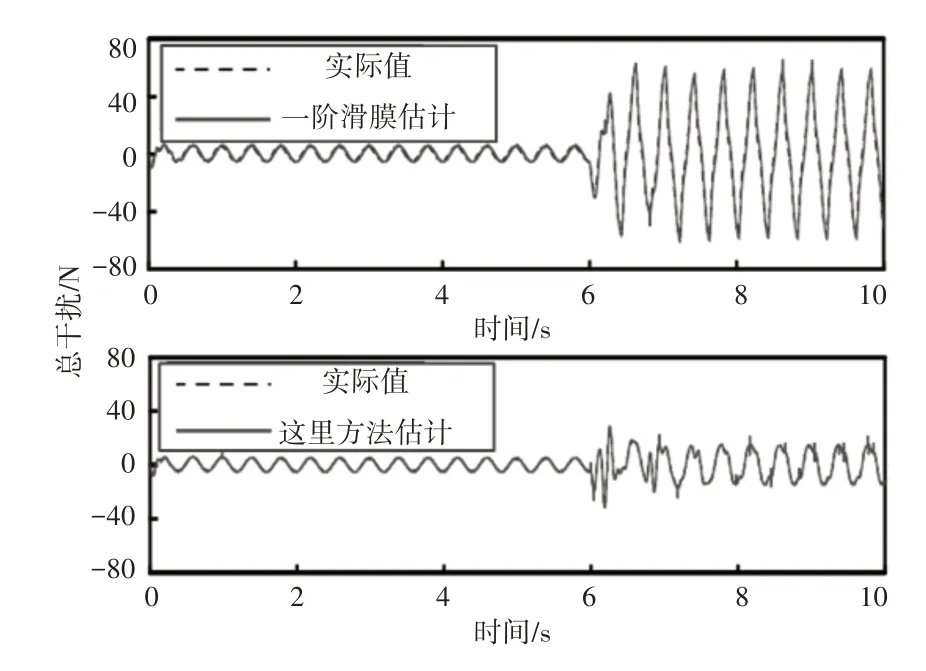
图6 不同控制方法下总干扰估计对比Fig.6 Comparison of Total Interference Estimation Under Different Control Methods

图7 不同控制方法下输出力对比Fig.7 Comparison of Output Force Under Different Control Methods
从图6、图7可以看出,这里所提方法的观测器能够准确估计系统的未知内部动态,鲁棒性较强,主动控制力也在规定的范围内。结果表明,一阶滑模控制抖振大,收敛精度低。而文中所提的控制方法抖振小,收敛精度高。验证了这里所提方法的可行性,具有一定的实用价值。
5 结论
这里提出了一种基于超螺旋二阶滑模控制的汽车主动悬架控制方法。控制器前端串联一个负加速度反馈回路来调节悬架性能,并利用扩展超螺旋观测器实时校正系统的未知内部动态。仿真结果表明,相比于一阶滑膜控制,该方法抖振少,收敛精度高,能够准确估计系统的未知内部动态,能更有效地改善汽车稳定性和舒适性。从目前的研究来看,这里仅对提出的方法进行了仿真分析,并未进行试验测试和应用测试。下一步是不断完善所提出的方法,争取尽快实际应用。
猜你喜欢
科学技术与工程(2023年28期)2023-10-14
激光与红外(2023年8期)2023-09-22
中国生物制品学杂志(2022年10期)2022-10-25
无损检测(2022年6期)2022-07-05
四川轻化工大学学报(自然科学版)(2021年3期)2021-08-30
重庆理工大学学报(自然科学)(2019年6期)2019-07-16
浙江大学学报(工学版)(2016年4期)2016-12-22
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
中山大学学报(自然科学版)(中英文)(2015年6期)2015-06-06
