决口险情监测系统在防汛抢险中的应用
2024-02-26 08:00金志伟冯登夷王智敏
中国防汛抗旱 2024年2期
金志伟 冯登夷 张 旸 王智敏
(江苏省防汛防旱抢险中心,南京 211500)
0 引 言
在防汛抢险任务中,决口封堵仍是亟待解决的难题。受持续强降雨和水库泄洪影响,当河湖出现漫堤决口险情时,堤防决口处的水流能量面积平均值(NA)对决口封堵时机的选择尤为重要。当NA<10 t/(s·m)时开始封堵,防汛抢险成功概率更大;若在人力、物力和装备尚未做好充分准备或者时机选择不恰当的情况下强行封堵,容易导致决口封堵失败[1-2]。
鉴于决口险情的全方位立体监测就显得尤为重要,只有掌握决口险情的实时动态,前线指挥部才能准确做出决策,更高效地完成决口封堵任务[3]。目前,技术人员利用无人侦测船对决口处流速、流量等水情信息进行实时监测;空中采用侦测无人机实时传输画面;地面采用全站仪实时测量距离;水上采用多波束无人侦测船不间断对溃口水下地形进行探测[3-6]。科技化监测装备先进、监测技术成熟并引入科技手段封堵溃口,大大提高了救援效率[7]。
1 决口险情监测系统
1.1 监测系统概述
决口险情监测系统具有机动性强、反应速度快、侦查范围全面、反应险情更直观的特点,主要包括以下组成部分(图1):①RTK300无人机:对决口上下游、左右岸进行三维建模;②C120 无人船:对决口水下地形扫描,对水面高程、决口左右岸声呐侧扫;③电子浮标测流仪:测量决口水流流速;④手持电波流速仪:对决口同一位置水流流速进行测量;⑤水位尺:测量上下游水位差;⑥望远镜测距仪:测量决口宽度;⑦RTK测量仪:测量决口堤顶高程。
1.2 监测系统分述
1.2.1 RTK300无人机
RTK300 无人机将飞行参数、导航、障碍物地图等多维度的关键信息整合至同一界面(图2),在水利、测绘、救灾等行业领域广泛应用,赋予作业人员强大的态势感知能力,是高效的空中生产力工具。RTK300无人机建图航拍步骤:①在遥控器界面选择航线飞行、选择创建航线;②框选出需要建模的范围;③设定飞行相关参数;④上传航线,执行命令。建模流程:①二维建模。将照片数据导入大疆智图软件,在选择任务类型中的重建类型栏中选取二维模型,新建二维重建任务;②三维建模。将照片数据导入大疆智图软件,在选择任务类型中的重建类型栏中选取三维模型,新建三维重建任务;③建模完成后,可测量模型的位置、长度、面积、体积等数据[8]。

图2 RTK300无人机操作界面
1.2.2 C120无人船
C120 型无人船搭载了单波束测深仪、侧扫声呐、船控系统。测深作业流程如下:①运用船控软件对航线进行规划;②无人船到达设置航点后,启动测深仪,开始记录测点水深;③无人船完成规划航线后,停止测深作业,进行水深取样,取样时利用自动采样装置定量采样;④数据改正,吃水改正设为0.12 m;⑤成果导出,根据所需数据进行导出处理[9]。
1.2.3 电子浮标测流仪
电子浮标测流仪是一种能够在短时间内测量水流流速的电子仪器。浮标主体为不锈钢材质,表层喷涂高耐磨防锈防污保护层,外侧搭载维护平台,便于用户维护的同时,降低了浮标的重心,增强了抗恶劣环境的能力,在较平静的水面和极端恶劣条件下均可使用。
1.2.4 手持电波流速仪
手持式雷达流速仪主要包括1 个平面雷达探头,内部自带倾角测量。该仪器利用多普勒原理制成,工作时向水面发出电磁波,电磁波遇到运动的水面会发生散射,并构成回波,由于接收到的回波频率相对于发射频率发生一定偏移,由多普勒频率方程可求得水面流速。手持式雷达流速仪被广泛应用于野外巡测、防洪防涝、污水监测等领域,其体积小、自动化程度高,尤其适用于汛期和突发状况监测。此外,由于手持电波流速仪测速时候不受水面漂浮物、水质、水流状态的影响,而且流速愈大,漂浮物愈多,其反射波愈强,将更有利于电波流速仪工作[10]。
1.2.5 水位尺
水位尺用于测量水位差,若两水位尺距离比较近则不需要移动全站仪,全站仪架设完毕调平后,将全站仪目镜中间的十字对准水尺D 与水面交汇处,按测量键测得全站仪与水尺D的高差E,再将全站仪目镜中间的十字对准另一个水尺F与水面交汇处,测得高差G,则水位差H=E-G;若需要移动全站仪则需要使用RTK测量仪测量一个基准点的高程I,测量全站仪到水尺D顶端高差J,再测量全站仪到基准点高差K算得水尺D的高程L,同理在另一端设立基准点M然后算得水尺F的高程N,即可算得水尺F的高程O,由两水尺的读数差减去水尺的高差即可测得水位差。
1.2.6 望远镜测距仪
望远镜测距仪一般采用脉冲法来测量距离。脉冲法测距的过程如下:测距仪发射出的激光经被测量物体的反射后又被测距仪接收,测距仪同时记录激光往返的时间;光速和往返时间的乘积的一半即为测距仪和被测量物体之间的距离。脉冲法测量距离的精度一般在±1 m左右。
1.2.7 RTK测量仪
RTK 测量仪可接收卫星信号实现高精度定位,定位精度可达厘米级。在GPS 测量中,静态、快速静态、动态测量都需要在测量后进行解算才能获得厘米级的精度,而采用RTK 测量仪进行测量,不仅能减少人力工作强度并节省费用,而且能够大幅提高工作效率。
2 实例应用分析
2.1 实例概况
研究实例位于江苏省防汛抢险训练中心演练区二次溃坝处。将训练水池注满水后,利用倒坝对二次溃坝处形成水流冲击的方式模拟决口险情现场并用决口险情监测系统对其进行监测。
2.2 决口险情监测系统应用
(1)决口险情监测小组接到抢险指令后,立即携带设备赶赴决口险情现场。到达现场后,现场负责人向指挥部汇报险情并按照指令展开作业。使用无人机对决口上下游50 m,左右岸100 m 的范围进行三维建图航拍。使用无人船对决口范围进行水下地形扫描,并完成数据处理,为水上挖机作业提供数据支撑,决口上游水下地形如图3所示。水上挖机在不增加附加浮筒时,水深不能超过1.50 m,增加附加浮筒时,作业水深不能超过4.00 m。水上挖机操作人员可根据无人船提供的位置信息和深度信息判断能否作业或作业方式。

图3 决口上游水下地形图
(2)一组人工测量队用手持电波流速仪测量决口处水流流速,用望远镜式激光测距仪测量决口宽度,并将数据汇报给现场负责人,现场负责人将数据汇报给前线指挥部;另一组人工测量队架设上下游水位尺、RTK 测量仪,完成水位差和堤顶高程等参数的测量,测量结果见表1。
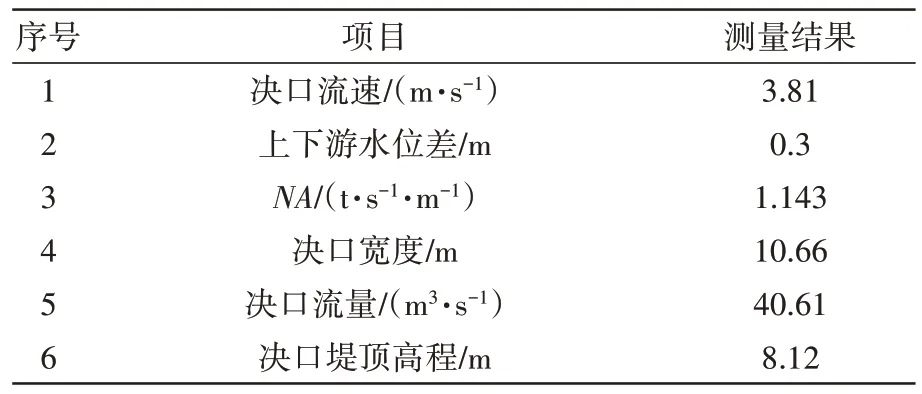
表1 决口险情监测数据测报表
(3)人工测绘组运用无人机建模,对现场测量数据进行标记,使前线指挥部更加直观地了解决口险情现场情况,决口现场实景如图4所示。

图4 决口现场实景图
(4)决口处流速、水位差、NA值随时间变化情况如图5 所示。工作组对决口宽度、流速、水位差、NA值每10 min进行1次测报,使指挥部24 h实时掌握决口险情动态。

图5 决口险情监测过程线
(5)无人机小组运用大疆M600pro 无人机抛投电子浮标,对决口上下游水流流速进行测量。电子浮标记录了测量时间、经纬度和水流速度,如表2 所示。RTK300 无人机通过4G 单兵图传终端将决口险情实时画面传送给前线指挥部。通过无人船对决口左右岸进行声呐侧扫作业,巡查其他管涌、漏洞、裂缝等隐患。
3 结 语
决口险情监测系统对灾情研判、封堵决策、人员转移等具有重要意义。决口险情监测系统实现了对汛情信息的实时采集、传输和管理,给防汛指挥决策提供了科学可靠的险情分析支持,保证了城市防汛指挥调度工作的及时性和有效性。但该系统对工作环境有一定要求,当遇到下雨或风力大于7级的天气情况时,无人机将无法工作;当水体有渔网或杂物较多时会影响无人船的探测,导致获取的决口断面水下信息缺乏准确性,此时流量只能通过估算得出。如遇上述问题,无人机需重新选择适宜环境开展工作,无人船则需选取无杂物水域区开展工作。系统其余设备基本无使用限制条件,后续系统应用有待进一步深入探索,并不断解决突破应用过程中存在的难点。
猜你喜欢
东北水利水电(2022年3期)2022-11-26
珠江水运(2021年24期)2022-01-23
散文诗世界(2021年11期)2021-11-30
加油站服务指南(2021年8期)2021-11-04
特种油气藏(2020年5期)2020-12-03
科技与创新(2019年22期)2019-12-07
广船科技(2019年2期)2019-10-16
东坡赤壁诗词(2018年2期)2018-05-10
水利规划与设计(2016年7期)2016-02-28
造船技术(2015年3期)2015-05-08