基于DP浮吊船的滑移下水驳船摇臂复位技术研究与应用
2024-03-25 15:26陈凯超王燕杨杰徐善志任苒
科技创新与应用 2024年8期
关键词:摇臂
陈凯超 王燕 杨杰 徐善志 任苒
摘 要:该研究旨在对陆丰12-3项目中海洋石油229摇臂复位方法进行优化设计。在导管架下水过程中,摇臂作为主要的受力结构,随导管架水平角度的变化而翻转。导管架下水后摇臂需尽快复位,以确保驳船安全。复位过程需要考虑安全性、稳定性及工作效率等多个方面的因素,设计合适的复位方案可以提高复位过程的安全性和效率。该研究采用CAD软件对复位支架进行建模,确定复位方向和复位工具,组织复位操作,并对复位效果进行验证。通过对复位方法的优化设计,可以为陆丰12-3项目中的海洋石油229提供可靠的摇臂复位方案,为其下水过程提供有力的保障。
关键词:浮吊船;下水;摇臂;复位;回复力
中图分类号:TE95 文献标志码:A 文章编号:2095-2945(2024)08-0045-05
Abstract: The purpose of this study is to optimize the reset method of offshore oil 229 rocker arm in Lufeng 12-3 project. In the launching process of the pipe frame, as the main force structure, the rocker arm overturns with the change of the horizontal angle of the jacket. The rocker arm of the jacket should be reset as soon as possible after launching to ensure the safety of the barge. Many factors such as safety, stability and working efficiency need to be considered in the reset process. Designing an appropriate reset scheme can improve the safety and efficiency of the reset process. In this study, the CAD software is used to model the reduction bracket, determine the reset direction and the reduction tool, organize the reduction operation, and verify the reduction effect. Through the optimal design of the reset method, we can provide a reliable rocker arm reset scheme for offshore oil 229 in Lufeng 12-3 project and provide a strong guarantee for its launching process.
Keywords: floating crane; launching; rocker arm; reset; resilience
海洋石油勘探开发中,固定式导管架平台是目前最为经济且技术最为成熟的平台之一,导管架平台开发的难点在于大型导管架的安装,此类导管架下水的方式通常采用滑移下水。在这一过程中,摇臂作为重要的受力结构,承担着为导管架提供支撑力和保护导管架主体结构的重要作用,是保证下水成功的关键。摇臂在导管架下水过程中随水平角度的变化而发生翻转运动。然而,由于摇臂通常重量较大,导致摇臂复位成为一个挑战性任务,需要综合考虑安全、稳定和效率等因素。这种导管架滑移下水后摇臂的复位问题,不仅对驳船自身的强度提出了更高的要求,也对摇臂复位技术提出了更为精确和严格的要求。那么该类摇臂使用什么方法复位,如何更高效,更安全复位,就成为了工程实际中急需解决的问题。
1 背景介绍
导管架滑移下水是海洋石油勘探开发中常用的下水方式之一,它具有成本低、操作简单、适用范围广等优点。然而,滑移下水的过程中,导管架及其附属结构所承受的力学性能要求极高,其安全性和稳定性是下水成功的重要保障。摇臂作为导管架的一个重要受力结构,承担着支撑导管架和保证下水成功的关键作用。
在现有的摇臂复位方法中,常规的方法需要大量人力和物力,操作风险高;而自动化复位方法虽然可以提高效率,但需要高成本的设备支持,对于很多企业而言难以承担,而且自动复位方案还有摇臂与导管架主体结构碰撞的风险[1]。本研究以驳船海洋石油229为例,针对摇臂复位问题,通过复位方案和工具的优化设计,并通过实际操作验证复位效果,旨在提供一种可靠有效的解决方案,为滑移下水过程中摇臂复位带来创新思路和方法。
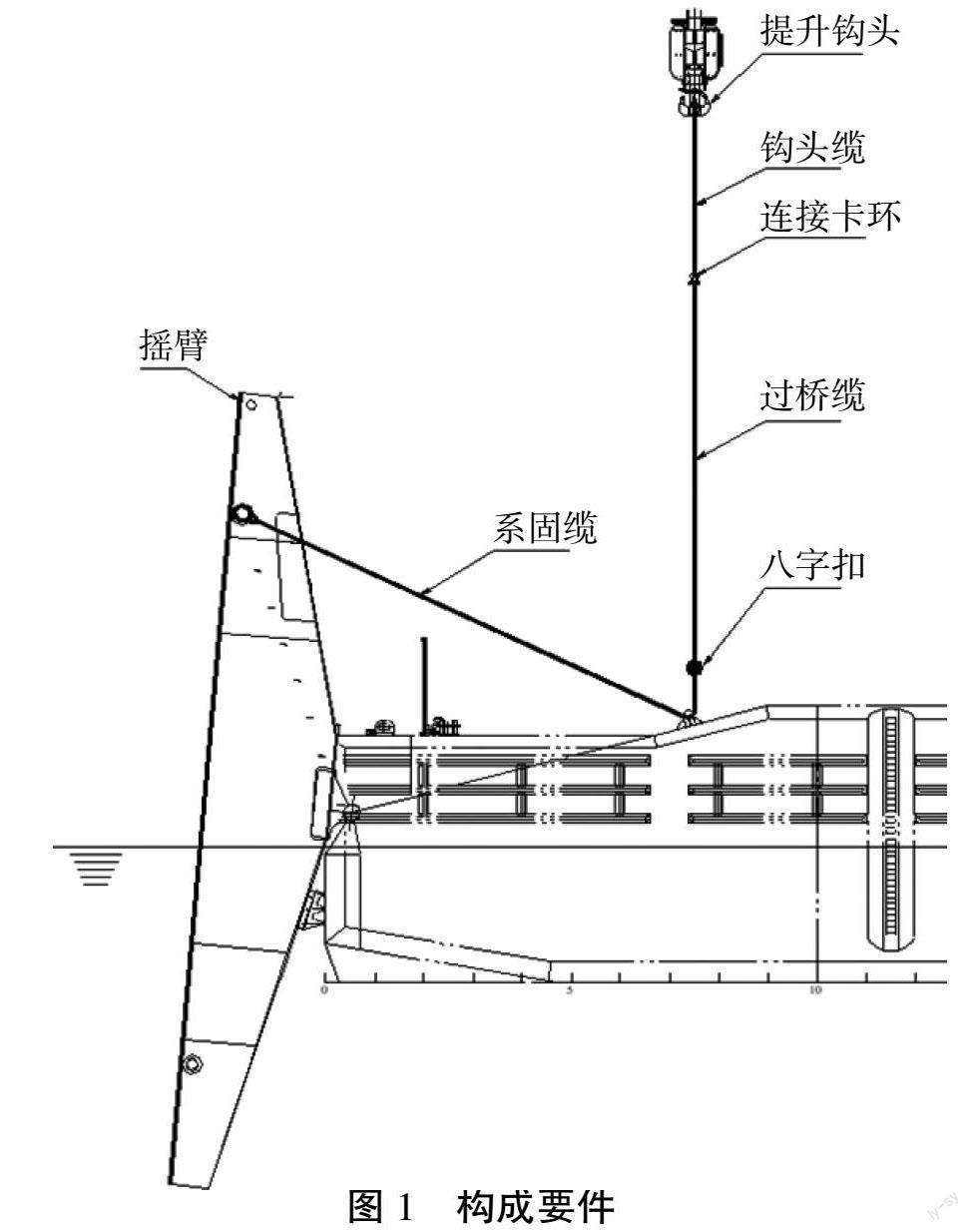
新设计摇臂复位专用门字框导向结构。系固缆系固于摇臂首部吊轴,由麻绳固定在摇臂上,待导管架下水后,系固缆另一端通过八字扣连接过桥缆,过桥缆上端通过钩头缆由浮吊船起吊,起吊力通过门字框发生变向,从而完成摇臂复位。
2 方案介绍
2.1 复位方案所需结构与物料
方案中主要構成要件如图1所示。
海洋石油229:运输驳船,负责导管架的运输,滑移下水等工作。其参数见表1。
海洋石油201:负责提供复位力。其参数见表2。
摇臂:在导管架滑移下水时能够随导管架水平角度的变化而翻转,从而分散导管架局部应力,减小压强,保护导管架主体结构[2]。
门字框:改变复位力方向,作用相当于定滑轮。
系固缆:?椎80×28 m高强缆,一端系固于摇臂首部吊柱,沿摇臂预布,用麻绳固定,另一端固定于甲板。待导管架滑移下水后,与过桥缆用“八字扣”连接。
过桥缆:?椎80×20 m高强缆,连接系固缆与钩头缆。
钩头缆:?椎80×10 m高强缆,上端直接连接钩头,下端通过150 t卡环连接过桥缆。
2.2 复位方案
在本方案中,系固缆从门字框中通过,门字框起到万向滑轮的作用。顶部滑动滚轴套在门字框上,以减小缆绳与门字框之间的摩擦。此外,为了避免卡环无法通过门字框的问题,系固缆和过桥缆采用了“八字扣”连接方式。综合HYSY229船艉处甲板面布置,基于DP动力定位浮吊船进行的摇臂复位作业的特点,考虑复位过程中摇臂受力分析,复位门字框设计结构形式如图2所示。门字框布置在驳船滑道的两端,整体布置如图3所示。
摇臂复位详细过程如下。
1)随着导管架完成滑移下水,摇臂倾斜到最大角度85°,此时系固缆经由八字扣形式连接到过桥缆,过桥缆上端用卡环连接钩头缆,钩头缆上部连接到提升钩头。如图4所示。
在工程实际中因为卡环体积过大难以通过门字框,因此,使用八字扣连接(图5)系固缆和过桥缆,简化施工过程,且有效地减少了摩擦力。
2)提升钩头力,扯断系固缆固定麻绳,使八字扣通过门字框。如图6所示。
3)继续提升钩头力,浮吊提供的复位力逐渐将摇臂复位,在这个过程中回复力为摇臂浮力和缆绳拉力,倾斜力为摇臂结构重力和摇臂内水重力,图7所示时刻为摇臂与水线面夹角45°。
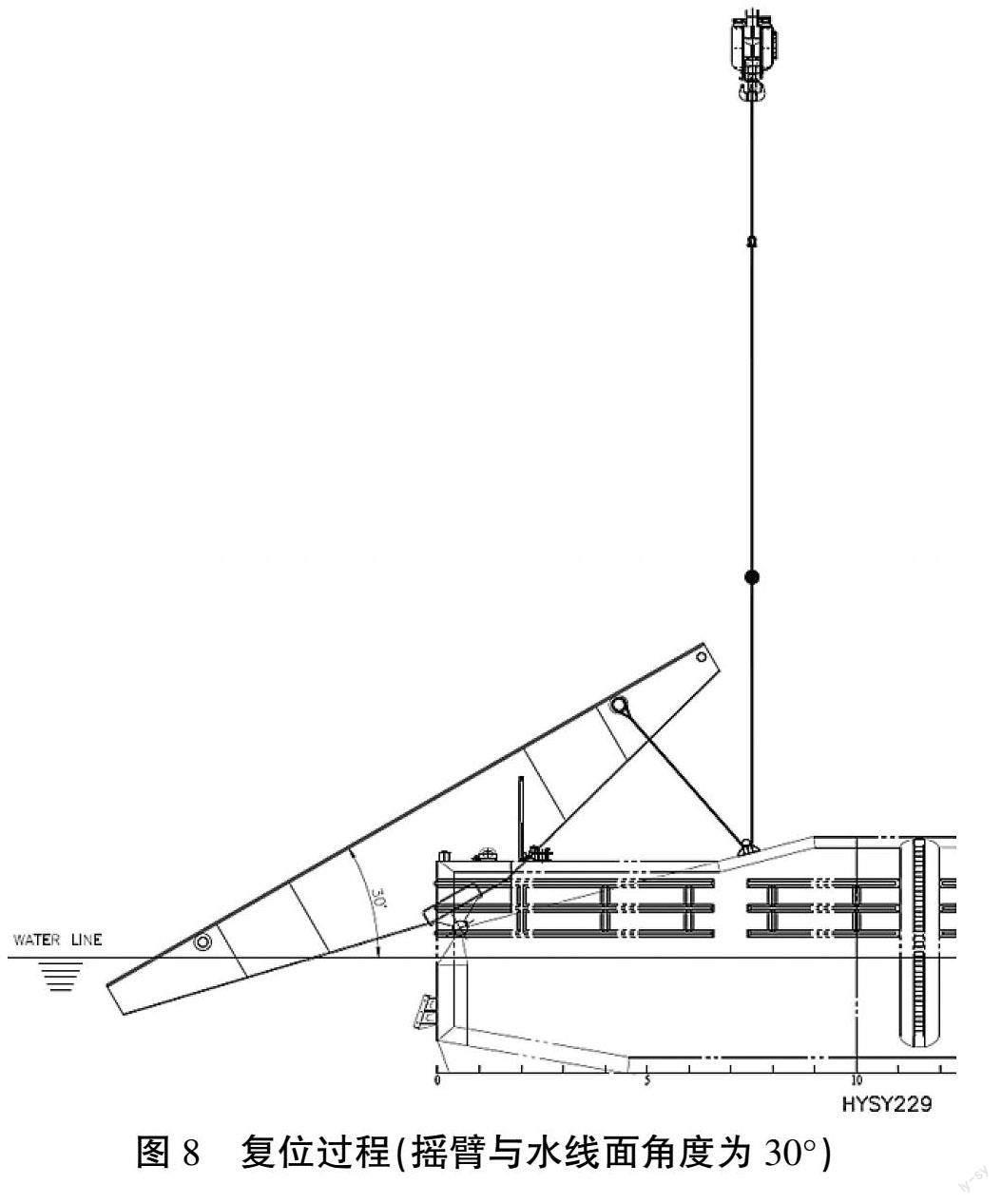
随着摇臂角度逐渐回复,钩头施加的回复力与摇臂接近垂直,拉力力矩达到最大值,浮力逐渐减小。摇臂的倾斜力包括摇臂重力和压载水重力力距也在逐渐减小。图8所示为摇臂与水平面角度为30°。
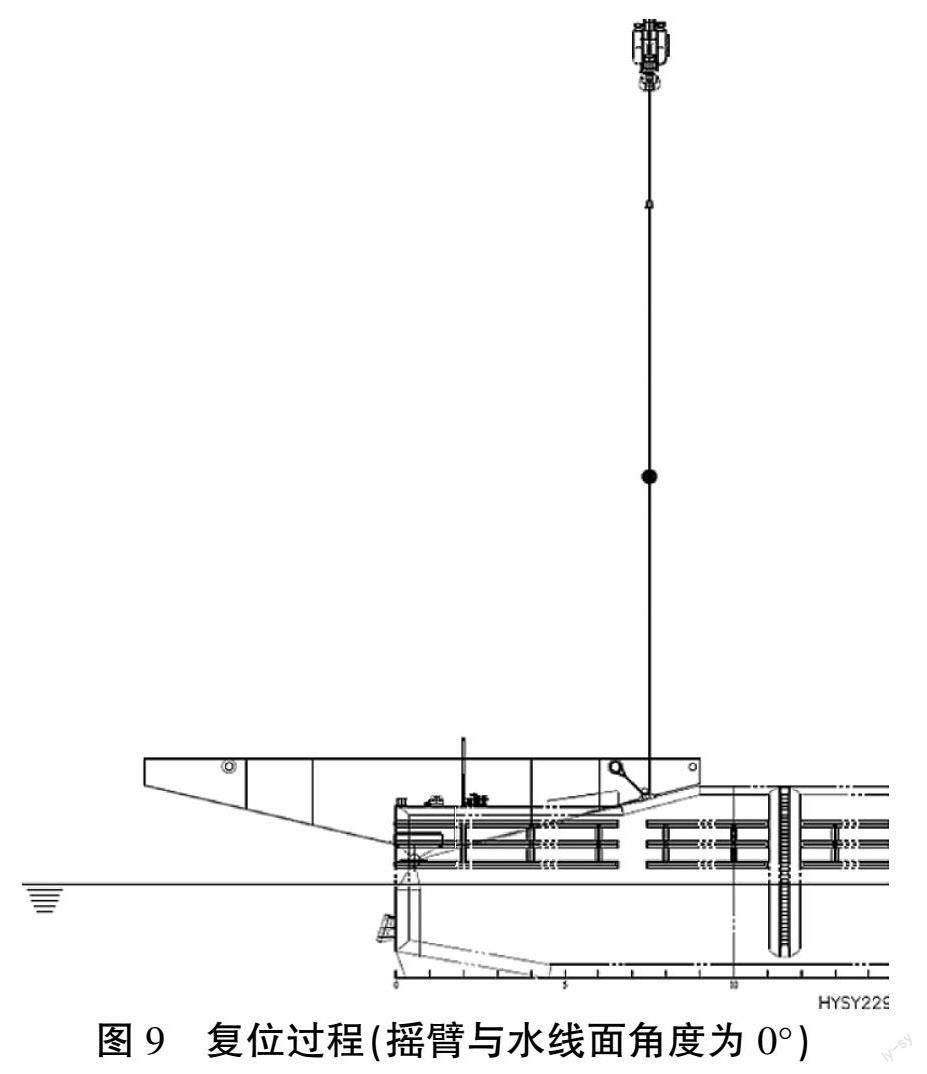
角度减小到30°以下,重心位置回落到驳船一侧,重力变为回复力,浮力完全消失,倾斜力为摇臂水重力。继续提升钩头高度,载荷逐渐减小,直至摇臂水平,此时摇臂复位完成。如图9所示。
2.3 关键节点计算
为了分析摇臂的受力状态,本研究选取85°、45°、30°和0° 4个关键节点作为样本,计算摇臂上的各个作用力,包括摇臂自身重力、进水舱内水的重力、摇臂浸水部分的浮力、浮吊提供的复位力,以及转轴处驳船提供的支持力。其中摇臂的重心X=FR0+1 967 mm;Y=0;Z=13 434 mm,其总重量为716 724 kg。摇臂重心位置如图10所示。
摇臂各部分构件的重量重心见表3。
以摇臂处于45°时的状态为例,摇臂受力分析如图11所示。
根据力矩平衡原理,浮吊的提升力P=(G1×L1+G2×L2-G3×L3)/L,具体受力计算见表4。
浮吊所能提供的最大拉力为800 t,远高于所需的浮吊提升力,符合工程要求。
为了确保门字框足够强度以承受负荷,本文使用ANSYS进行有限元分析,进行强度校核[3]。将250 t的负荷施加到框架平面偏转18°的方向上,结果显示极限强度因子UC为0.90,强度满足工程要求[4]。
2.4 优势分析
相比于原方案[5],采用绞车+滑轮组拉动摇臂进行复位的方法,通过液压绞车拖动滑轮组,带动缆绳,作用力于系固缆柱。本研究提出的新方案采用了更加简洁有效的复位方案和更少量的作业工具,剔除绞车滑轮组进行的拖拉作业,避免因复位缆剐蹭摇臂而使复位方案失效,避免了因两侧绞车操作误差而受力不均,从而大大缩短了作业时长,降低了作业耗费的资源和成本,用时消除原方案存在的隐患。同时,新方案的工具设计更加合理,避免了复位缆绳与摇臂固定筋板干涉的问题,提高了复位效果和安全性。综合来看,新方案具有操作简便、耗费资源少、成本低廉等优点,为摇臂复位问题的解决提供了更加可靠和有效的方案和工具。
3 结论
本研究以海洋石油229为例,以陆丰12-3项目为依托,对摇臂复位方法进行了优化设计,并通过实际操作验证了此方案的可行性。结果表明,本文提出的优化复位方案和工具可以有效地解决摇臂复位过程中的问题,与原方案对比具有高效率、低成本、低风险的特点,并且具有较高的安全性和可操作性[6]。此外,本研究对海洋石油勘探开发领域中的摇臂复位现存问题进行了深入探讨和分析,并提出了可靠的解决方案和创新思路。这些成果不仅为摇臂复位问题的解决提供了一种新的思路和方法,同时也为滑移下水过程中的安全稳定运行提供了一定的参考和借鉴价值。
综上所述,本研究对于海洋石油勘探开发领域中的摇臂复位问题的解决具有一定的实际应用和推广价值,为日后同类的摇臂复位作业提供了宝贵的经验和思路。
参考文献:
[1] 刘玲.导管架下水后驳船摇臂运动与自动复位研究[D].天津:天津大学,2009.
[2] 樊之夏.深水导管架安装研究[J].中国海洋平台,2003(2):29-31.
[3] 梁学先,张永国,何敏,等.MOSES软件在大型导管架海上安装分析中的应用[J].中国造船,2012,53(S2):362-371.
[4] 环境条件和环境荷载规范:SY/T 10050—2004[S].
[5] 邵亮亮,魏佳廣,刘涛,等.牵引系统辅助工程驳船摇臂复位研究[J].石油工程建设,2018,44(1):27-29,35.
[6] 侯金林,于春洁,沈晓鹏.深水导管架结构设计与安装技术研究——以荔湾3-1气田中心平台导管架为例[J].中国海上油气,2013,25(6):93-97,127.
猜你喜欢
金属加工(冷加工)(2023年1期)2023-02-04
机械工程与自动化(2021年6期)2022-01-18
新疆钢铁(2021年1期)2021-10-14
再生资源与循环经济(2021年7期)2021-04-09
工程设计学报(2020年6期)2021-01-22
水泥工程(2020年4期)2020-12-18
机械工程与自动化(2020年4期)2020-08-25
河南工学院学报(2017年1期)2017-06-07
汽车实用技术(2016年1期)2016-12-24
科学中国人(2015年26期)2015-12-28