
一种控制输入约束下的不确定离散系统非脆弱保性能控制器设计
2024-04-24 07:46段虹州韩光信高兴泉
河南科技 2024年3期
段虹州 韩光信 高兴泉

摘 要:【目的】针对考虑扰动及摄动情况下的控制输入约束的不确定离散系统,提出了非脆弱保性能的控制方法。【方法】首先,以最小化目标函数为性能指标、控制输入饱和范围为约束条件,从而推导出约束状态下的非脆弱保性能控制律。其次,使用李雅普诺夫方程来构造非线性矩阵不等式。再次,结合Schur补定理和布谷鸟群智能优化算法对不等式进行求解,得到控制输入约束下的非脆弱保性能控制律的参数。最后,通过Quanser三自由度陀螺仪平台进行试验验证。【结果】试验结果表明,本研究所提出方法的稳态误差浮动不超过0.07、跟踪误差不超过0.15。【结论】该方法在面对扰动及摄动情况时具有更高的鲁棒性,对提升三自由度陀螺仪的稳定性及控制精度具有重要意义。
关键词:不确定性离散系统;控制输入约束;非脆弱性;保性能控制
中图分类号:TP273 文献标志码:A 文章编号:1003-5168(2024)03-0004-06
DOI:10.19968/j.cnki.hnkj.1003-5168.2024.03.001
Non-Fragile Guaranteed Cost Control for Uncertain Discrete
System with Control input Constraints
DUAN Hongzhou1 HAN Guangxin1 GAO Xingquan1,2
(1.Jilin Institute of Chemical Technology, Jilin 132022,China;
2.Jilin Industrial Vocational and Technical College, Jilin 132013,China)
Abstract: [Purposes] In this paper, a non-fragile guaranteed performance control method is proposed for uncertain discrete systems with input constraints under perturbation. [Methods] In this method, By taking the minimum objective function as the performance index and taking the saturation range of the control input as the constraint condition, the non-fragile guaranteed performance control law under the constraint state is derived. Secondly , the nonlinear matrix inequality is constructed by Lyapunov equation. Then, Schur's complement theorem and Cuckoo bird intelligent optimization algorithm are used to solve the inequality, and the non-fragile guaranteed performance control law parameters under the control input constraints are obtained. Finally, the experiment is verified by Quanser-3-DOF gyroscope platform. [Findings] The results show that the steady-state error of the proposed method is less than 0.07 and the tracking error is less than 0.15. [Conclusions] The method proposed in this paper has higher robustness in the face of disturbance and perturbation, and is of great significance for improving the stability and control accuracy of the 3-DOF gyroscope.
Keywords: uncertain discrete system; control input constraint; non-fragile; guaranteed performance control
0 引言
非脆弱保性能控制[1]是指在控制系統中考虑输入约束和性能指标的前提下来设计控制律,从而使系统具有优异的性能,在面对不确定性或扰动时能保持强鲁棒性。该方法被广泛应用于工业生产[2]、机器人控制[3]、航空航天[4]等领域。
保性能控制起源于20世纪末,在21世纪得到进一步发展,学者们经过研究相继取得了诸多成果。Yu等[5]提出关于不确定离散系统的保性能控制方法;Chen等[6]提出不确定离散时滞系统的保性能控制方法;Fan等[7]提出连续时间系统的保性能控制方法;He等[8]提出不确定T-S模糊系统的保性能控制方法;Yang等[9]对离散线性系统的保性能控制进行深入研究。
Makila等[10]研究发现,若某些控制器的参数发生极其微小的波动,闭环系统的性能有可能会大幅度下降,严重时甚至会直接导致系统不稳定。因此,对自身参数摄动具有较强抵制能力的控制器被称为非脆弱控制器[11]。Jiang等[12]提出将H∞控制和非脆弱控制融合的办法,并进行了实践验证;Gao等[13]对非脆弱、保性能和H∞控制的融合进行研究。
上述研究成果并未考虑控制输入约束,获得的控制器参数通常具有较高的增益,易导致系统不稳定或设备损坏。因此,本研究考虑最小化性能函数、系统不确定性、控制输入约束及控制器增益摄动,提出了一种控制输入约束下的非脆弱保性能控制器设计方法,在保证系统运行能满足控制输入约束的同时,还具有良好的性能,并在三自由度陀螺仪上验证了所提方法的有效性。
1 问题描述
考虑不确定的离散系统表示见式(1)。
[x(k+1)=A+ΔAx(k)+B+ΔBu(k)x(0)=x0] (1)
式中:[x(k)∈Rn]为系统状态向量;[u(k)∈Rm]为控制输入向量;[ΔA]、[ΔB]為反映系统模型中参数不确定性的未知实矩阵。
本研究考虑参数不确定性时假设为范数有界,见式(2)。
[ΔAΔB=HFE1E2] (2)
式中:[H]、[Ei]([i=1,2])为具有合适维数的确定矩阵;[F]可测,且满足[FTF≤I];[I]为具有适当维数的单位矩阵。上述参数反映出不确定参数的结构信息。
由于执行机构饱和因素,控制输入必须满足约束条件,见式(3)。
[uν(k)=eTvu(k)≤uν,max,ν=1,2,…,m,t>0] (3)
式中:uv为向量u的第[ν]个分量;[ev]为引入的空间[Rm]第[ν]个标准向量基。
考虑控制输入约束的非脆弱保代价控制问题描述如下。设计的状态反馈控制器见式(4)。
[u(k)=(K+ΔK)x(k)=Kx(k)] (4)
为使闭环系统内部稳定,最小化目标函数见式(5)。
[J=k=0∞xT(k)Qx(k)+uT(k)Ru(k)] (5)
同时,为满足控制输入约束,[Q]和[R]为给定的正定对称矩阵,[K]为设计的状态反馈控制器增益,[ΔK]为控制增益加性摄动,[M]和[N]为具有合适维数的确定矩阵,[Fk]可测且满足[FTkFk≤I],[I]为具有适当维数的单位矩阵。
引理1:取[M=MT],[H]和[E]为具有相应维数的实数矩阵,[F]满足[FTF≤I],则以下条件等价[14]。
[M+HF(t)E+ETFTHT<0] (6)
存在标量[ε>0],使得[M+εHHT+ε-1ETE<0]。
根据引理1,可推导出以下结论。
推论1:取[M=MT],[H]和[E]为具有相应维数的实数矩阵,[Fi(t)]满足[FT(t)F(t)≤I]引理以下条件等价。
[M+HFE+ETFTHT>0] (7)
存在标量[ε>0],使得[M-εHHT-ε-1ETE>0]。
若不等式[M+HF(t)E+ETFTHT>0]成立,则有[-M-HF(t)E-ETFTHT<0],即[-M+(-H)F(t)E+ETFT(-H)T<0],也即[M-εHHT-ε-1ETE>0]。
2 非脆弱保性能控制器设计
将控制器(4)代入到系统(1)中,并考虑系统模型的不确定性(2),得到的闭环系统见式(8)。
[x(k+1)=Aclx(k)x(0)=x0] (8)
式中:[Acl=A+HFE1+(B+HFE2)K]。
对于系统(8),若存在对称正定矩阵[P]使得[K]满足式(9)。
[ATclPAcl-P+Q+KTRK<0] (9)
则状态反馈控制律[u(k)=Kx(k)]是系统的一个具有性能矩阵[P]的保性能控制律。其中,[K=K+ΔK],控制性能目标函数(5)的一个上界为[J*=xT0Px0],即对所有的[k>0],都有[xT(k)Px(k)≤xT0Px0]。
为消除不等式条件(7)中含有的模型不确定性,获得易检验条件,根据推导,得到保证式(4)成立且保证目标函数[J≤α]的充分条件,即存在标量[ε1>0],对称正定矩阵[X=P-1],使得以下矩阵不等式成立,见式(10)、式(11)。
该不等式虽消除了模型的不确定性,但还包含控制器的增益摄动,下面寻找一个满足式(10)的充分条件。
定义[Y=KX],根据Schur补定理有式(12)。
考虑控制输入约束(3),闭环系统满足控制约束意味着应有式(13)。
[uTv(k)uv(k)≤u2v,max, t≥0, v=1,2,…,m] (13)
根据[uv(k)=eTv(Kx(k))],可得式(14)。
[xT(k)KTeveTvKx(k)≤u2v,max] (14)
式中:[ev]为引入的空间Rm第[ν]个标准向量基。
根据前面的讨论,若式(8)、式(9)成立,则对任意的[k>0],均有[xT(k)Px(k)≤xT0Px0=α],即式(8)成立的一个充分条件是对所有的[x(k)]均满足式(15)。
[xT(k)KTeveTvKu2v,maxx(k)≤xT(k)Px(k)α] (15)
将[K=K+ΔK=K+MFkN]代入,则有式(16)。
[u2v,maxeTvKKTevPα+eTvM0Fk(t)0N+0NTFTk(t)MTev0≥0] (16)
根据推论1,上式成立的一个充要条件是存在标量[ε3>0]使得式(17)成立。
[u2v,maxeTvKKTevPα-ε3eTvM0eTvM0T-ε-130NT0NTT≥0] (17)
左右两边同时乘以[diagIαP-1I],定义[Y=KX],见式(18)。
[u2v,max-ε3eTvMMTeναeTvY0αYTevXαXNT0αNXε3I≥0] (18)
假设初始状态范数[x0]有界,即[x0≤ψ],则式(11)成立的一个充分条件见式(19)。
[1ΨIIαX≥0] (19)
3 基于布谷鸟算法的控制器参数整定
最小化矩阵不等式(19)求出性能指标的一个上界[?min=α]、满足控制输入约束(18)、存在一个P使(12)成立,并求出尽可能大的控制器参数[K1K2K3K4]。适应度函数的选择应以快速、准确为目标,使用ITAE误差为性能评价指标,见式(20)。
[?=0tτ·|e(τ)|dτ] (20)
式中:积分区间为系统仿真时间;[e]为实际输出和期望输出的差值。
布谷鸟算法流程为初始化、循环、最优解输出。
①初始化。设巢穴个数[N=4]、种群规模[D=25],初始化巢穴的位置见式(21)。
[P0=x1(0)x2(0)x3(0)x4(0)T] (21)
②循环。在初始化及每次循环体结束后进行位置更新,保留上一次最优巢穴的位置[Pb(t-1)]对巢穴位置的更新见式(22)。
[xm(t+1)=xm(t)+σ?Levy,m=1,2,3,4] (22)
式中:[Levy?u=t-1-β(0<β≤2)]。
选取[0.25]作为巢穴主人发现寄生鸟蛋的可能性,并与[Pa]进行比较,并随机更新被发现概率较高的巢穴位置,得到一组新的巢穴位置,用新的、较好的巢穴代替原来较差的,得到一组新的巢穴位置,见式(23)。
[Pt=x1tx2tx3tx4tT] (23)
③最优解输出。找到前面环节得到的最优巢穴位置和最优解,若达到循环条件则停止迭代,此时输出最优解,见式(24)。
[K1K2K3K4=Pb=x1tx2tx3tx4tT] (24)
反之,程序跳转循环体继续进行迭代。
4 仿真分析与试验验证
本研究使用三自由度陀螺仪平台来验证文中所提方法的有效性。其动力学模型[15]见式(25)。
[J3q2 + P1cosq2q3 -Jαsinq2cosq2q23 = τ2]
[J2+Jasin2q2q3-P1cosq2q2+2Jasinq2cosq2q2q3][=0] (25)
利用前向差分定理将其离散化,得到不确定性离散系统,见式(26)。
[x(k+1)=AC+ΔAx(k)+BC+ΔBu(k)x(0)=x0]
(26)
式中:[AC=10-0.004hJy001000.004hJz0100001 ];[BC=0.004Jy000];[ΔA=r1A1];[ΔB=r2B2]。
取[|r1|≤1]、[|r2|≤1],取值通过放大转子质量至原来的1.1倍得到。控制输入约束为[|u(t)|≤5]。系统描述见式(27)。
[x(k+1)=AC+HFE1x(k)+BC+HFE2u(k)] (27)
对性能指标式(5),取[Q=200001600000.0100000.000 1]、[R=5],经布谷鸟算法迭代200次,得到相对最小化。
性能指标[α=3.107 5],此时对应的控制参数为K1=0.505 183 3,K2=1.172 301 764,K3=0.046 237 9,K4=0.000 084。
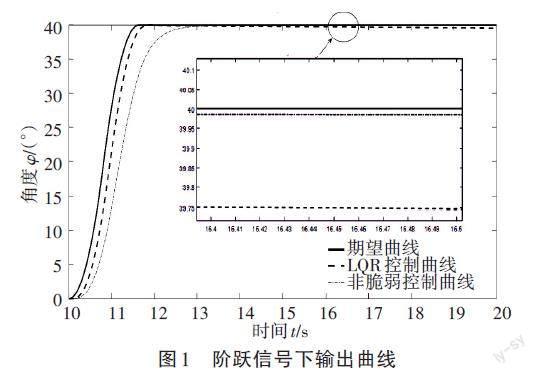
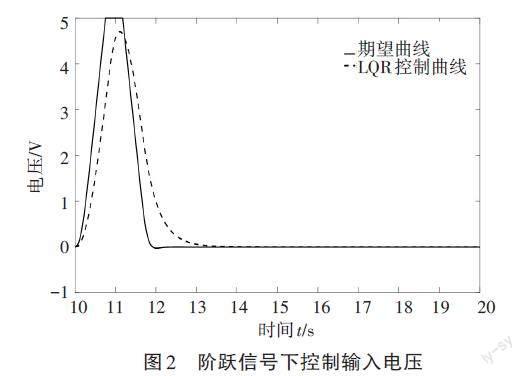
通过仿真试验来验证控制参数的准确性及控制效果。阶跃信号下输出曲线、输入电压如图1、图2所示,阶跃输入仿真控制精度见表1。
由表1可知,LQR控制方法的跟踪误差为0.392 2,优于非脆弱控制下的跟踪误差。LQR控制方法的稳态误差为0.32,远大于非脆弱控制下的跟踪误差。达到稳态后,非脆弱控制器可稳定控制系统运行,效果远强于LQR控制器。符合控制器设计思路,可进行实物验证。
考虑到模型内部干扰,将电机效率调至95%作为内部扰动,模拟电路老化导致的性能下降。考虑内部扰动的阶跃信号情况下输出电压、控制输入电压如图3、图4所示。
非脆弱保性能控制下的输出曲线响应速度较慢,稳态后,精度比LQR控制下要高。在设备运行时,非脆弱保性能控制始终未达到设定的电压上界,但LQR控制在每一次设备进行姿态变换时都超过临界值(5 V),有可能对设备造成损害。
将陀螺仪外部银色框架拧至轻微松动作为震动干扰,阶跃信号下输出电压如图5所示。
在同样的外部扰动情况下,非脆弱保性能控制的鲁棒性能相对突出,稳态误差为0.087 1。在外部扰动情况下,非脆弱保性能控制器的鲁棒性能要优于LQR控制器的鲁棒性能。
考虑控制器增益摄动,设非脆弱控制器为[K],但实际上执行的控制见式(28)。
[K=s1ΔK1+s2ΔK2] (28)
式中:[ΔK1=10];[ΔK2=01];[-1≤s1(t)≤1];[-1≤s2(t)≤1]。
定义矩阵[Fk=diags1(t)s2(t)],则控制器增益的描述见式(29)。
[ΔK=MF(t)N] (29)
式中:[M=11];[N=1001],取[Ψ=π24]代入式(23)。
考虑控制器摄动的阶跃信号情况下输入电压、控制输出电压如图6、图7所示。
5 结语
本研究基于最小化性能函數、控制输入约束、保性能控制等需求来设计控制器,通过李雅普诺夫方程推导将其转化为成立的充分条件,进而推导出非线性矩阵不等式,再使用布谷鸟群智能优化算法对其进行求解优化。通过仿真试验来验证其可行性,再将求得的控制器带入三自由度陀螺仪平台中。试验结果表明,约束状态下存在允许范围内的扰动或摄动,本研究所提出的非脆弱保性能控制器具有更好的鲁棒性及控制精度。
参考文献:
[1]WU M,LAN Y H,SHE J H,et al. Design of non-fragile guaranteed-cost repetitive-control system based on two-dimensional model[J].Asian Journal of Control: Affiliated with ACPA,the Asian Control Professors' Association,2012(1):109-124.
[2]KONG Y S,ZHAO D X,YANG B,et al.Robust non-fragile H-infinity/L-2-L-infinity control of uncertain linear system with time-delay and application to vehicle active suspension[J].International Journal of Robust and Nonlinear Control,2015(13):2122-2141.
[3]SUN P,WANG S Y.Guaranteed cost non-fragile tracking control for omnidirectional rehabilitative training walker with velocity constraints[J].International Journal of Control,Automation and Systems,2016(5):1340-1351.
[4]WANG Y F,JIANG C S,WU Q X.Multi-model soft-switching cost-guaranteed non-fragile control for near-space vehicle[J].Control Theory & Applications,2012(4):440-446.
[5]YU L ,GAO F R.Optimal guaranteed cost control of discrete-time uncertain systems with both state and input delays[J].Journal of the Franklin Institute,2001(1):101-110.
[6]CHEN W H,GUAN Z H,LU X .Delay-dependent guaranteed cost control for uncertain discrete-time systems with delay[J].IEE Proceedings - Control Theory and Applications,2003(4):412-416.
[7]FAN Q Y,YANG G H.Adaptive nearly optimal control for a class of continuous-time nonaffine nonlinear systems with inequality constraints[J].Isa Trans,2017,66:122-133.
[8]HE M,LI J M .Robust nonfragile guaranteed cost control for uncertain T-S fuzzy Markov jump systems with mode-dependent average dwell time and input constraint[J].International Journal Of Systems Science,2018(13-16):3146-3168.
[9]YANG X,LIU S J.Optimal control of unknown discrete-time linear systems with additive noise[J].Journal of Systems Science and Complexity,2023(2):591-612.
[10]MAKILA P M,KEEL L H,BHATTACHARYYA S P.Comments on Robust,fragile,or optimal? [with reply][J].IEEE Transactions on Automatic Control,1998(9):1265-1268.
[11]FATEME B,VALIOLLAH G,MANUEL S.Non-fragile robust model predictive controller design for uncertain time-delay systems with input constraints[J].2023(6):1259-1274.
[12]JIANG X L,XIA G H,FENG Z G,et al.Non-fragile guaranteed-performance H ∞ leader-following consensus of Lipschitz nonlinear multi-agent systems with switching topologies[J].Nonlinear Analysis Hybrid Systems,2020(3):100913.
[13]GAO X Y,TEO K L,DUAN G R.Non-fragile robust H∞ control for uncertain spacecraft rendezvous system with pole and input constraints[J].International Journal of Control,2012(7):933-941.
[14]XIE L H.Output feedback H∞ control of systems with parameter uncertainty[J].International Journal of Control,1996(4):741-750.
[15]劉志成.基于三步法的三自由度陀螺仪轨迹跟踪控制[D].吉林:吉林化工学院,2022.
