花生小区播种施肥机设计与试验研究
2024-01-09 10:08张春晓王东伟刘艳芬何晓宁李永超张远东李云康李冬杰左百强
农机化研究 2024年4期
张春晓,王东伟,刘艳芬,何晓宁,李永超,张远东,李云康,李冬杰,左百强
(青岛农业大学 机电工程学院,山东 青岛 266109)
0 引言
花生作为我国重要的经济农作物,在有效提高我国农业生产经济价值以及食品安全发展方面仍然具有极其重要的战略意义。因此,加大力度研发与现代花生种植有关的农业机械,提高现代花生农业种植管理收获的农业机械化管理程度,是不断提升当前我国现代花生农业耕种种植收获和综合利用机械化管理水平的一个重要战略举措[1-2]。
大力发展花生小区育种试验是我国开展良种安全、种子安全的重要举措。现阶段,我国花生小区育种技术已趋成熟,但小区机械化作业仍处于空白,而生产机械化显然已经成为小区育种试验现代化的重要组成部分,也是提高小区耕种效率、育种试验科学化的重要保证。因此,对小区花生播种收获机的需求也越来越多[3]。
花生小区育种试验农艺与大田农艺有所不同。小区育种试验采用一垄双行的栽培模式,且小区精密播种不同于大田播种要求,每个育种试验地由多个不同的小区构成,一般相邻小区之间间隔一定距离;每个试验小区应尽量保证育种精量播种的深度一致,无空穴与重播且粒距均匀,以保证试验的性准确性;每个试验小区都是独立试验,以30~50cm作为间隔道;每个小区为独立的试验单元,在规定的小区行长内恰好能播完试验单元所要求的定量的种子;每个小区间播种的花生品种不同,进行完上一小区时,应进行清种工作;育种小区试验对准确性要求高,应尽量避免外界因素导致的试验误差[4-5]。小区育种试验农艺如表1所示。
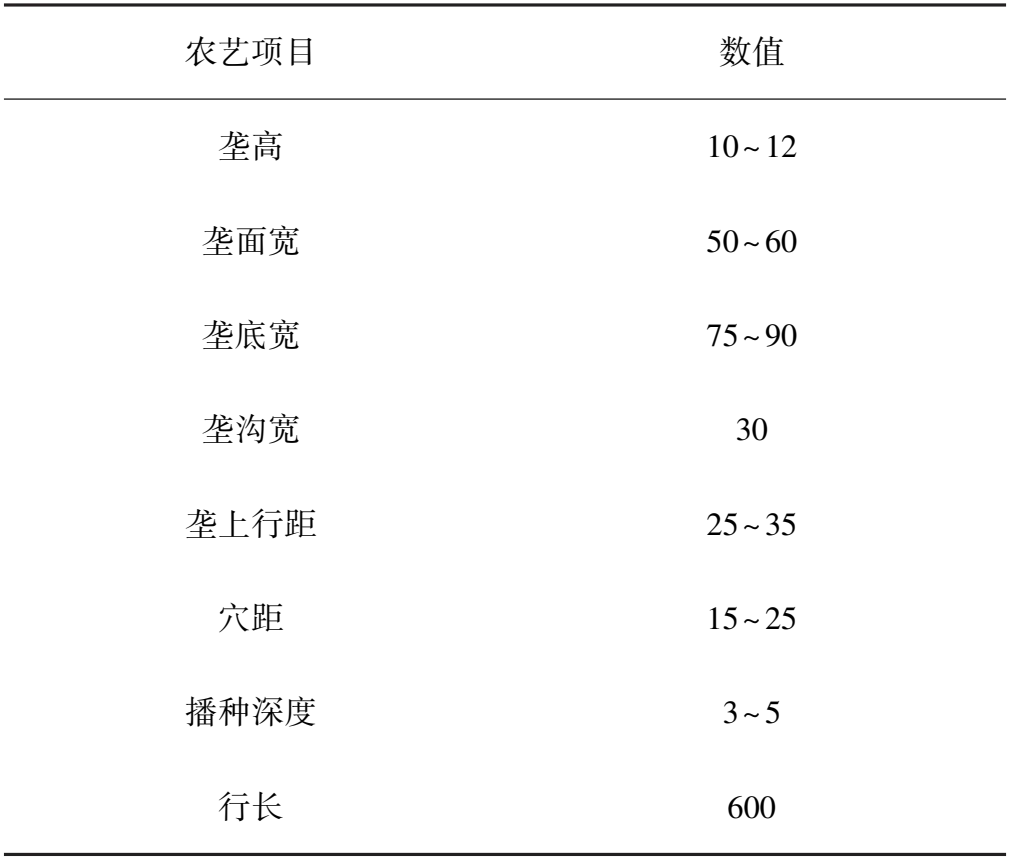
表1 小区育种试验农艺表
我国对花生小区育种播种机械的研究较少,小区播种机械发展缓慢,大豆、棉花等种子长宽比较大且整体尺寸也偏大,其对应育种机械的研制进度及推广情况较好,已有相对应的小区播种机械;而对于长宽比较大且对种子质量要求高的花生种子相应育种机械的研制进度以及推广远不能满足现代农业的发展和对我国良种安全的需要。因此,研制一种花生小区播种施肥机,对于实现花生小区育种机械化具有重要意义。
目前,许多学者对花生小区播种机械进行了研究。河北农业大学马跃进教授[6]研究的花生小区育种精量播种机构,满足了在粒距合格率、空穴率、重播率以及伤种率等方面的要求,但并未对清空率进行研究。为此,本文结合小区种植对农机农艺的要求,设计了多功能花生播种施肥机,采用垄作覆膜的种植模式,利用窝眼轮式排种器、外槽轮式排肥器进行播种施肥。同时,在排种器上设计了净种装置,能够清除窝眼轮内剩余的种子,保证育种小区试验的科学性。同时,设计了起垄装置与覆膜装置,能够一次性完成开沟、施肥、起垄、播种及覆膜等多项工作。
1 结构组成及工作原理
结合花生小区育种的农艺要求和播种机构整机设计要求[7-9],设计了一种适用于花生小区育种的播种机构,主要由悬挂装置、肥箱、外槽轮排肥器、种箱、窝眼轮排种器、水箱、覆土器、地膜压轮、覆膜棍、地膜支架、覆膜开沟器、地轮、双圆盘开沟器、起垄装置及起垄铲组成,如图1所示。播种机采用后悬挂方式,根据设计及选用的零部件,对工作阻力进行初步的计算,选择30kW以上的拖拉机作为配套动力。
花生播种机的驱动地轮以链传动的方式带动花生排肥、排种器工作。花生播种机工作时,首先施肥部分的锄铲式开沟器开出一道施肥沟,肥料在外槽轮排肥器的带动作用下通过输肥管进入到肥沟内,完成施肥过程;起垄装置的起垄铲将土铲起,在肥沟覆土的同时起垄装置将铲起的土挤压成型,完成起垄工作;排种部分的锄铲式开沟器在垄上进行开沟,播种机的窝眼轮排种器在地轮的带动下将种子从型孔里面排出,经过排种口进入到导种管,靠自身重力落入到开沟器开好的种沟内,覆土板再将垄面刮平,完成排种工作;最后,地膜被装夹在地膜夹持架上,由覆膜辊将地膜展开,地膜压轮将地膜压在垄两侧的垄沟里,再由地膜覆土器对垄底的地膜进行覆土,全部工作完成。该花生小区播种施肥机可以一次完成开沟、起垄、施肥、播种、镇压以及覆膜等作业,三维图如图2所示。

1.悬挂装置 2.肥箱 3.外槽轮排肥器 4.种箱 5.窝眼轮排种器 6.水箱 7.覆土器 8.地膜压轮 9.覆膜棍 10.地膜支架 11.覆膜开沟器 12.地轮 13.双圆盘开沟器 14.起垄装置 15.起垄铲图1 小区花生播种施肥机的整体结构示意图Fig.1 Schematic diagram of the whole structure of the plot peanut seeder

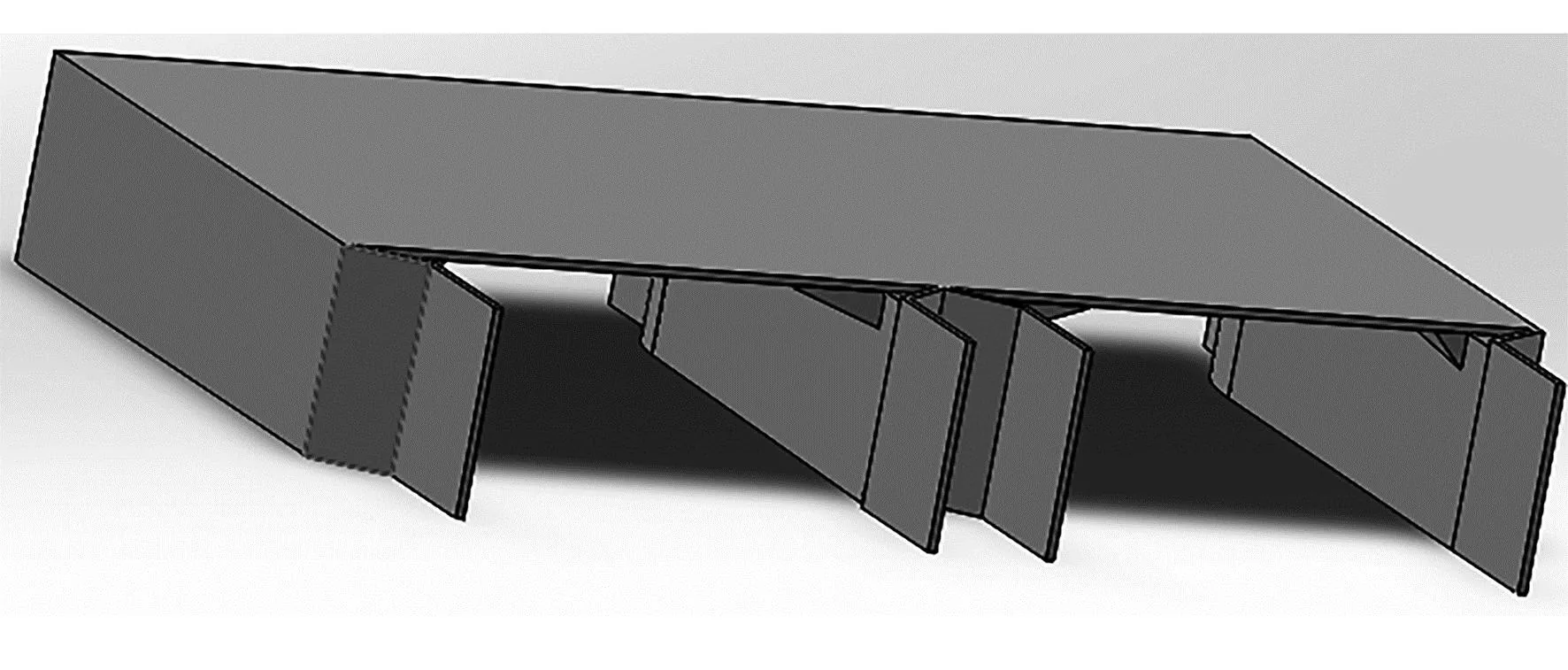
图2 花生小区播种施肥机三维图Fig.2 Three - dimensional diagram of seeding and fertilizing machine in flower - growing district
2 排种器与净种装置的设计
2.1 排种器的确定
排种器选择窝眼轮排种器,结构相对简单,漏种率低,清种效果也好,能够有效保证播种的合格率。
窝眼轮排种器由窝眼轮、排种器壳、玻璃罩、齿轮、链轮、净种装置、清种轮、刮种器和隔种护板等组成[10],如图3所示。窝眼轮排种器的最主要工作部件一个水平方向旋转的窝眼轮,充种时种子依靠自身重力落入到窝眼轮排种器的型孔中(充种阶段);然后,随着窝眼轮的旋转转到刮种器的位置时,刮种板能够将多余的种子刮除(清种阶段),起到清种的作用;种子再随着窝眼轮的转动进入到护种区,该区域能挡住型孔内的种子,使其无法掉出型孔(护种阶段);最后种子跟随窝眼轮转动至最下方,种子依靠自身重力从型孔排出,经过排种口进入导种管,再进入到种沟(排种阶段),完成排种过程;窝眼轮继续转动,逐渐恢复到可充种状态,如此循环,实现连续排种工作。

1.齿轮 2.排种器壳 3.净种装置 4.窝眼轮 5.刮种器 6.清种轮 7.隔种护板图3 排种器结构图Fig.3 Structure diagram of seed metering device
窝眼轮式排种器[11]的穴播数设计为1~2粒,窝眼轮型孔的直径d需要根据花生种子的轴向和径向的最大尺寸来确定,即d>Xmax(种子的最大长度),且d>2Dmax(种子的最大直径)。花生种子的个体本身就存在很大的差异,长度在10~24mm之间,直径在5~12mm之间,故型孔设计为直径为24mm的半圆型孔,如图4所示。

图4 窝眼轮模型Fig.4 Socket eye wheel model
窝眼轮的直径不应该太小,容易导致漏播,应在60~280mm之间。在这里,取窝眼轮直径Dw=60mm进行设计。窝眼轮的型孔数z计算公式为
(1)
其中,z为窝眼轮型孔数;Dw为窝眼轮直径(m);vm为播种机作业速度(m/s);S为株距(m);vp为窝眼轮线速度(m/s)。
在此取地轮的直径D=400mm,按照最大株距S=250mm进行计算,地轮每转1周走过的距离为
X=πD=1256mm
(2)
因此,地轮转过1周所播下的穴数等于5.024(1256/250)。地轮与窝眼轮之间的传动采用链传动,取传动比为1,链轮齿数均为14,地轮转过1周则窝眼轮也转过1周,故窝眼轮型孔数为5。
确定窝眼轮转速:当排种器工作时,种子靠自身重力进入到型孔内,故当窝眼轮转速过高时容易造成空穴,即所谓的漏播。因此,排种器的转速与窝眼轮转速不宜过高,窝眼轮转速[12]可根据以下公式进行计算,即
(3)
其中,np为窝眼轮转速(r/min);vm为播种机作业速度(m/s);S为株距(m);z为窝眼轮型孔数。
确定窝眼轮的线速度[13-15],可根据以下公式进行计算,即
(4)
其中,vp为窝眼轮线速度(m/s);Dw为窝眼轮直径(m);S为株距(m);z为窝眼轮型孔数。
窝眼轮的极限线速度为
(5)
其中,v为窝眼轮极限线速度(m/s);L为型孔长度(m);l为种子的平均长度(m);g为重力加速度(m/s2);Dmax为种子的最大直径(m)。
由此可见,窝眼轮的实际线速度vp<窝眼轮的极限线速度v,故窝眼轮的设计符合要求。
2.2 净种装置的设计
净种装置是通过旋转的凸轮控制净种板上下摆动来清空窝眼,达到清空上一轮剩下种子的目的。净种装置由齿轮1、凸轮、净种板、支点轴、齿轮2和净种管组成,如图5所示。链轮将驱动力传递给窝眼轮轴,并带动固定的齿轮2旋转,通过啮合的齿轮使齿轮1旋转,带动凸轮旋转;净种板在左侧重力作用下左低右高,绕支点轴可以旋转一定角度,此时凸轮处于最低位置;当凸轮旋转到最高位置时,凸轮顶起净种板,净种板右侧会降低,恰好进入花生窝眼孔内,将窝眼孔内的残留种子拨至净种管内排出排种器,并收集起来回到种箱。净种装置凸轮设计:凸轮升距根据净种板右端进入窝眼孔的深度计算,净种板右端进入窝眼孔的深度初步定为3mm,根据凸轮位置与支点轴的相对距离,升程为10mm。净种装置齿轮设计:按照窝眼轮型孔数量5个、凸轮有两个升降周期、比例为5/2=2.5,则齿轮的传动比为i=2.5。根据机械设计手册,计算得出两个齿轮的参数,将齿轮分别安装在窝眼轮轴和净种轴上,并通过键进行定位卡紧。

1.齿轮1 2.凸轮 3.净种板 4.支点轴 5.齿轮2 6.净种板图5 净种装置示意图Fig.5 Schematic diagram of net seeding device
凸轮的设计尺寸及示意图如图6所示,排种装置整体示意图如图7所示。
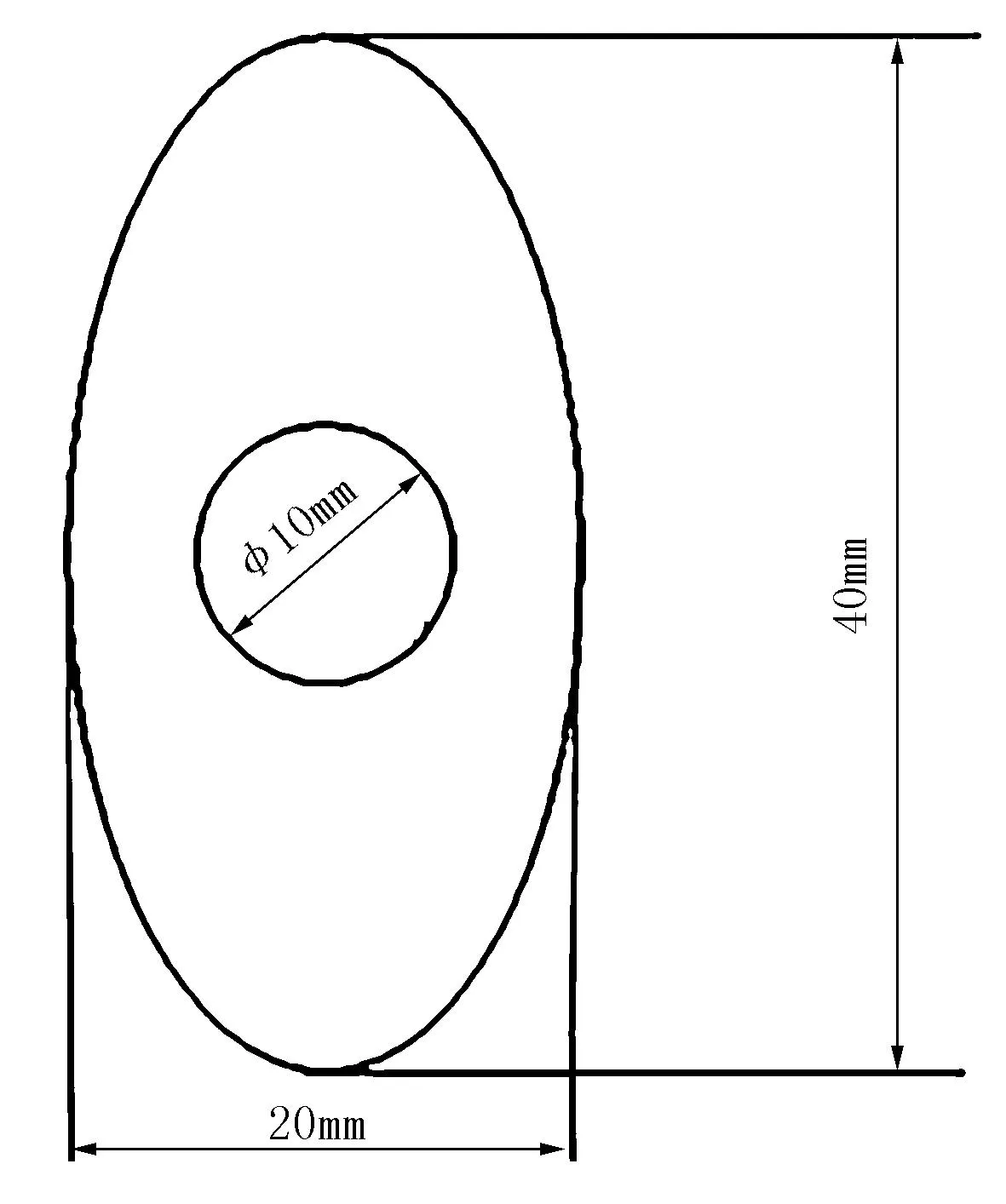
图6 凸轮示意图Fig.6 Schematic diagram of CAM
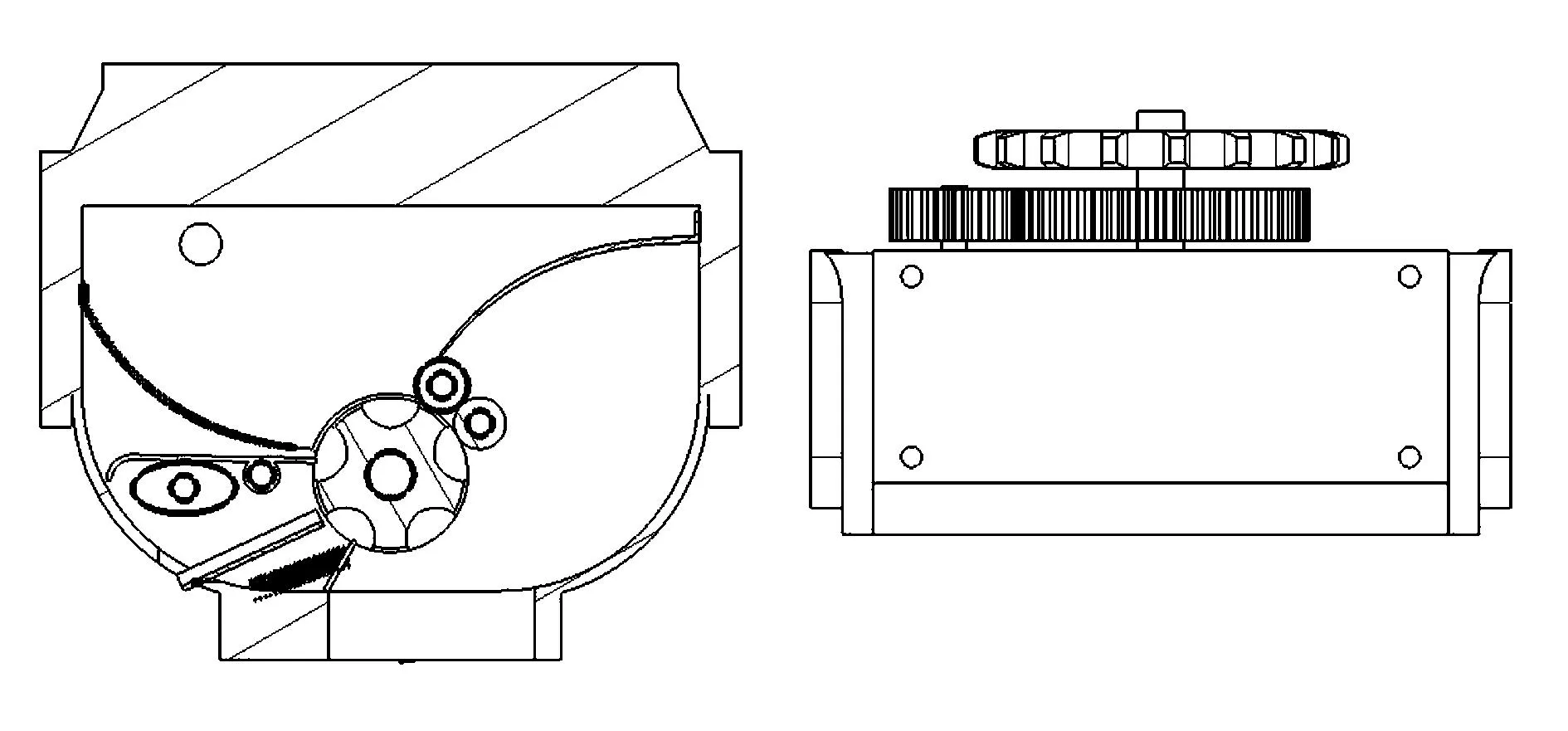
图7 排种装置整体示意图Fig.7 Overall schematic diagram of seed metering device
3 传动系统、起垄装置与覆膜装置设计
3.1 传动系统的设计
传动系统[16]主要是指地轮与排种器之间的传动结构,内容包括链条型号、链节数、链轮齿数、链轮材料、链传动中心距的确定,然后计算压轴力并确定其润滑方式。主要设计过程如下:
1)选择链轮的齿数以及确定传动比。链轮的齿数不能低于17(一般是17~114),传动比在设计窝眼轮型孔数时已经确定为i=1。在此,选择两个链轮齿数均为17,即z1=z2=17。
2)当量的单排链计算功率Pca计算公式为
(6)
其中,KA为工况系数;Kz为主动链轮齿数系数;Kp为多排链系数,双排链为1.7,三排链为2.5。
经查阅《机械设计》可知KA=1.0,通过计算可得Kz=1.27,传递功率P=1kW,所以根据式(6)得到Pca=1.13kW。
3)确定链条的型号以及节距p。链条的型号可通过查阅《机械设计》得到,查表时应保证的条件为
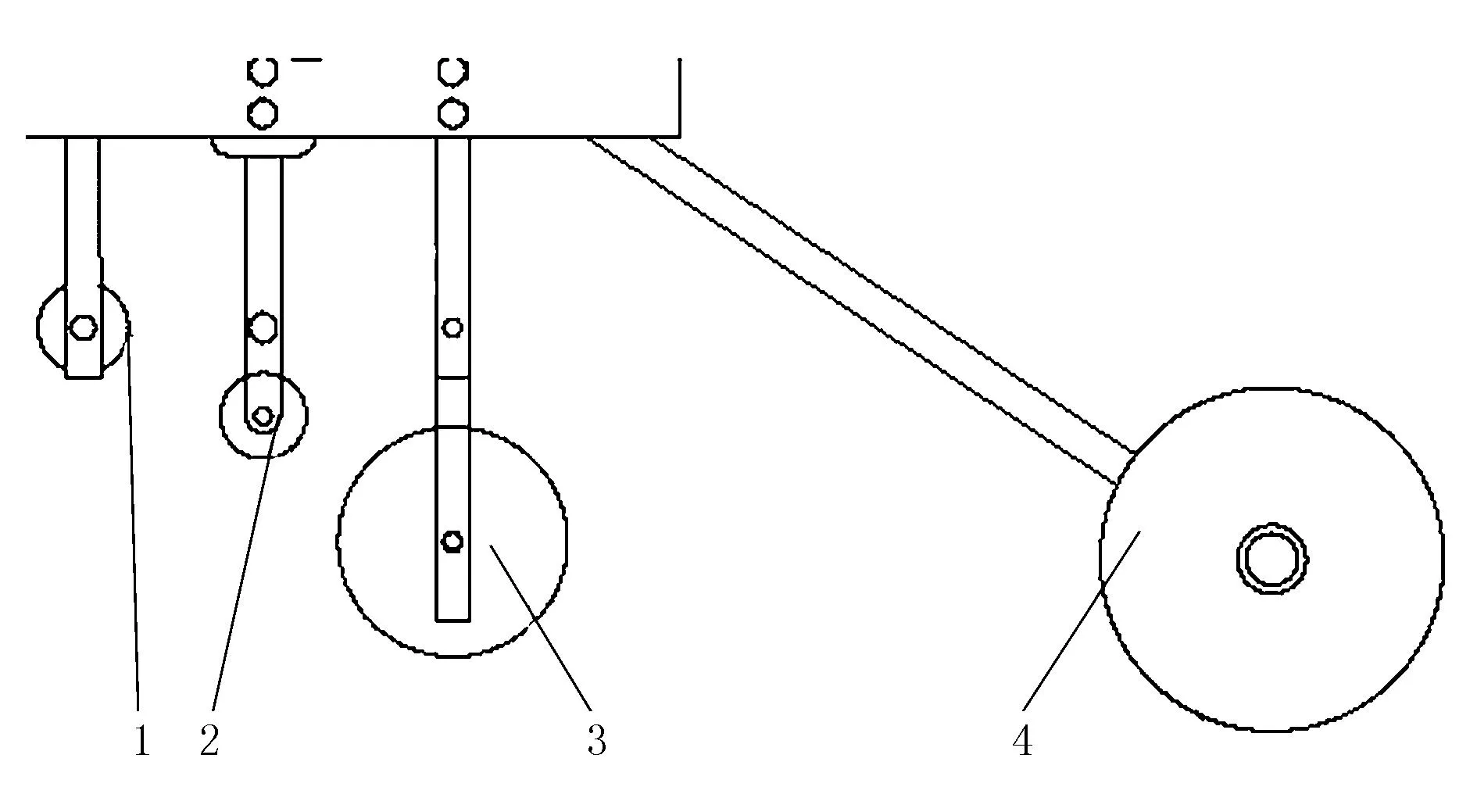
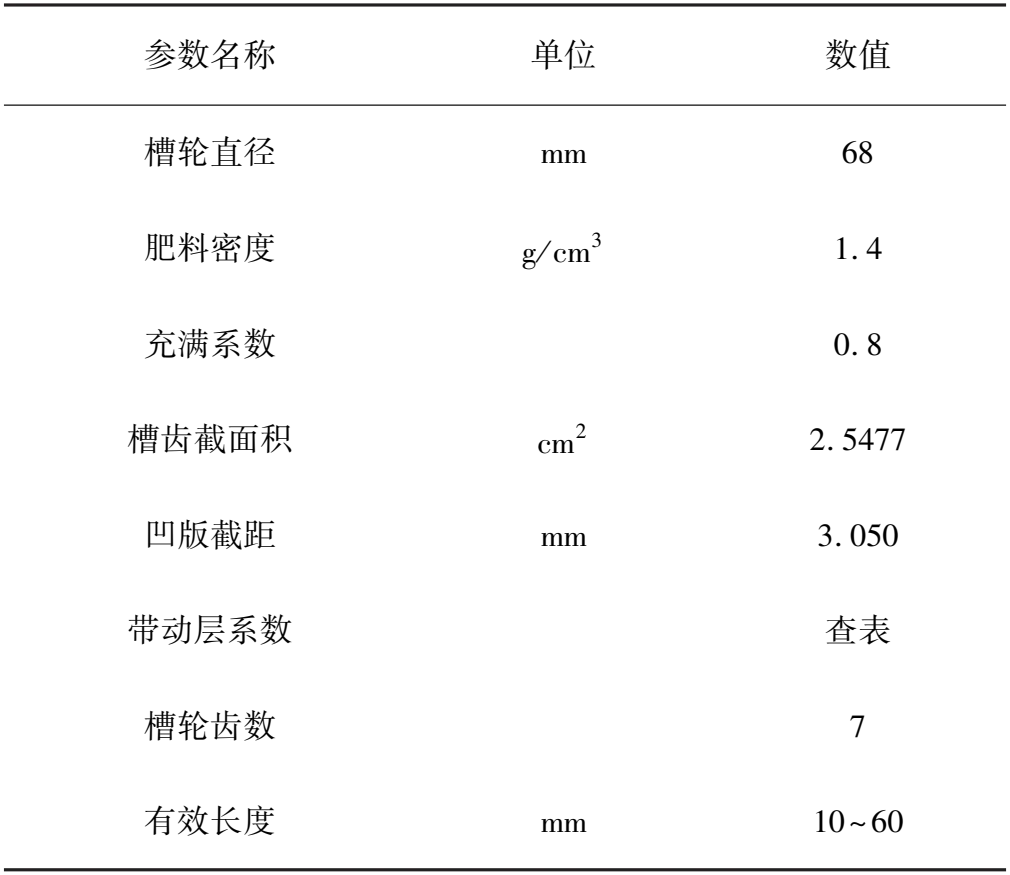
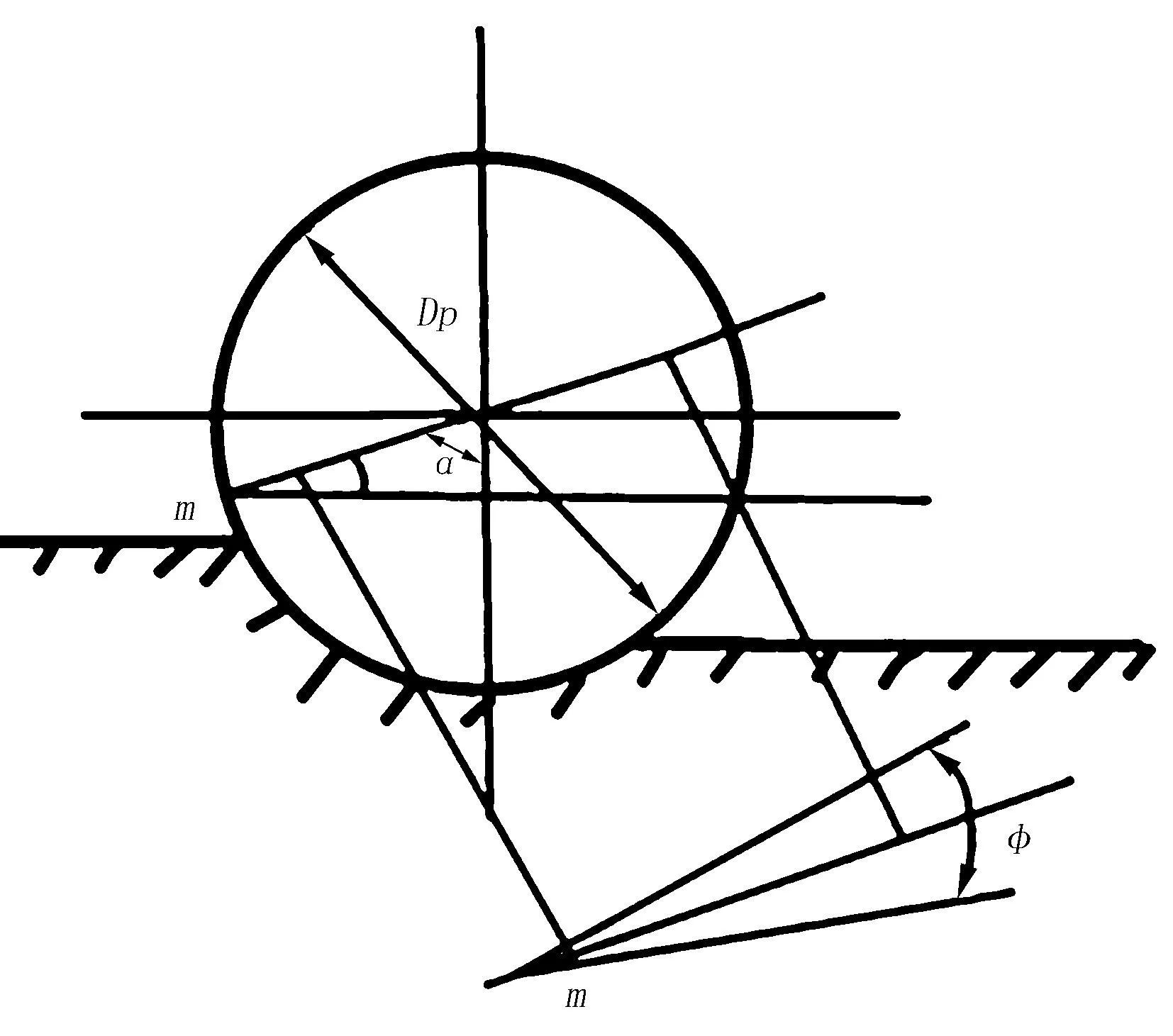
Pca (7) 其中,Pc为单排链额定功率。确定截距后,最终得到选用链条的型号为16A,节距为25.4mm。 4)计算链节数以及中心距a0。初次选用中心距a0=(30~50)p,并按照以下公式计算链节数Lp0,即 (8) 此次选用a0=30p(即a0=762);当a0=50p时,a0=1270。所以,取a0=1000。 将a0=1000带入式(8),可得Lp0=78.64。链节数在一般情况下都是偶数,为了不使用过渡链接,在这里用Lp作为Lp0圆整后的链节数,故Lp=80时将不会使用到过渡链节。 链传动的最大中心距amax的计算公式为 amax=fp[2Lp-(z1+z2)] (9) 其中,f1为中心距计算系数。当两外链轮齿数相时同(即z=z1=z2)时,链传动的最大中心距为 (10) 将p、Lp、z带入式(10),可得amax=800.1mm。 5)链传动链速的计算以及润滑方式的确定。平均链速按照下式计算,即 (11) 其中,v为链平均速度(m/s);z1、z2为主从动链轮的齿数;n1、n2为主从动链轮的转速(r/min);p为链条的节距(mm)。 当链平均速度为0.14m/s时,型号为16A的链条的润滑方式为定期人工润滑。 6)压轴力的计算。有效压轴力为 Fe=1000P/v=7142.9N (12) 其中,P为传动功率 (kW);v为链条平均转速(m/s)。 当链轮垂直传动时,压轴力系数KFP=1.05,压轴力为 Fp≈KFPFe=7500N (13) 7)主要参数确定。链条型号为16A,链轮齿数z1=z2=17,链节数LP=80,中心距a=800mm,润滑方式为定期人工润滑。 因垄作能够提高土壤温度、有利于调节土壤水分,增加土壤透气性,促进植物根系的伸张,便于田间管理,得到了广大种植户的认可和采纳,故设计一款起垄装置进行花生播种过程中的起垄作业。该装置由起垄犁、侧犁板及上成型板构成[17-18],如图8所示。 图8 起垄装置示意图Fig.8 Schematic diagram of ridging device 装置工作时,起垄犁将土铲起,翻起来后的土壤经过侧犁板及上成型板对垄侧面的土壤进行挤压,使垄得以成型。起垄装置的主要技术参数如表2所示。 表2 起垄装置的主要技术参数表 覆膜种植措施在环境温度较低、热量不足的北方地区起到增温、增产、增收的作用[19]。 覆膜机构[20-21]由主要由地膜夹持架、覆膜辊、地膜压轮以及地膜覆土器等部分组成,如图9所示。 覆膜作业是花生播种工作中的最后一道工序。作业时,把地膜安装到地膜夹持架上,人为地将地膜拉长一段距离,然后地膜随着整个播种机前进,在覆膜辊的作用下展开;地膜压轮将地膜压在垄沟里,最后由地膜覆土器在地膜两侧对地膜进行覆土。 1.地膜夹持架 2.覆膜辊 3.地膜压轮 4.地膜覆土器图9 覆膜机构简图Fig.9 Diagram of laminating mechanism 化肥排肥器应该满足以下要求: 1)排肥量稳定均匀,不会受肥箱内存放肥料数量、地势颠簸程度以及机具前进速度等因素的影响。 2)通用性好,能播种不同种型号的肥料。 3)排肥器的调节装置灵敏、准确,调节的范围广,并能充分适应不同品种化肥的田间施肥要求。 4)工作阻力尽可能小,使用方便,便于作业结束后清理肥箱内残余的肥料。 5)排肥器中与肥料接触的零部件都要做好防腐蚀措施,同时还要考虑其耐磨性,以延长其使用寿命。 排肥器种类有很多,在此设计一款外槽轮式排肥器,其排肥稳定性与均匀性都较好,如图10所示。 1.肥箱 2.刮肥板 3.肥料颗粒 4.槽轮图10 外槽轮排肥器Fig.10 Outer groove wheel fertilizer extractor 外槽轮排肥器有效长度的确定:该排肥器与肥箱相连,肥料通过槽轮的转动。肥料一部分被强制排出,称为强制层;另一部分是在强制层的带动下排出,称为带动层。外槽轮排肥器的理论排量可以根据《农业机械设计手册》中的公式计算出来,即 (14) (15) 其中,D为外槽轮直径;L为外槽轮有效长度;ρ为有机肥密度;η为槽齿颗粒充满系数;s为单个槽齿横截面积;l为凹板截距;λ为带动层系数;z为外槽轮齿数。 通过查阅资料以及查询《农业机械设计手册》得到的参数如表3所示。 表3 参数表 外槽轮排肥器排量与有效长度L是线性关系,与带动层系数为函数关系,故不能得出一个量,所以根据有效长度来计算。本次设计将有效长度L分为3个数据,即L1=15mm、L2=30mm、L3=55mm。查阅资料得到与之对应的带动层系数λ分别为λ1=0.17、λ2=0.19、λ3=0.2,计算得到理论排肥量分别为Q1=0.038kg、Q2=0.078kg、Q3=0.143kg。 经查询,花生小区的施肥量约为450~600kg/hm2。根据拖拉机在小区内的最大行进速度1.6m/s进行计算,将行距进行大致估算,对最终的估算结果与3个理论排量进行比较,确定有效长度L=55mm较为合理。外槽轮的主要技术参数如表4所示。 表4 槽轮的最终参数表 1)开沟器在选用的过程中应该考虑以下多种因素:①开沟深度要保持一致,沟型整齐;②不乱土层;③入土能力强,不缠草,不堵塞;④有一定的覆土能力;⑤结构简单,工作阻力小。 2)开沟器的选择。开沟器有滑动式和移动式两大类。滑动式开沟器包括双圆盘式开沟器和单圆盘式开沟器;移动式开沟器有锄铲式开沟器、箭铲式开沟器、芯铧式开沟器、靴式开沟器、滑刀式开沟器和船式开沟器。 本次设计需要用到的开沟器包括排肥机构与排种机构。排种机构上选择双圆盘开沟器,该开沟器对土壤的适应性好,工作性能非常可靠,如图11所示。 图11 排种机构开沟器示意图Fig.11 Schematic diagram of row mechanism ditch opener 选取的双圆盘开沟器的主要工作参数如下:圆盘直径Dp为350mm;圆盘夹角φ为15°;m点的位置即角为α=15°;开沟宽度b=Dp(1-sinα)sin(φ/2)。 锄铲式开沟器具有制造简单、价格低廉、质量轻等多种优势,而且易入土。又考虑到开沟器是在土地耕整以后使用,一般都整地良好,杂草较少,所以在排肥机构上选择锄铲式开沟器,如图12所示。最后,确定其主要工作参数为b=40mm。 图12 排肥机构开沟器示意图Fig.12 Schematic diagram of furrow opener for fertilizer discharging mechanism 样机田间性能试验于2021年4月30日在山东省青岛市胶州试验基地进行,试验地块与当地田地情况相同;试验品种为花生研究所试验花生种宇花系列等多种花生品种,肥料为花生专用复合肥。田间调查及测定项目包括穴距偏差率、双粒率、重播率、漏播率、出苗率及清种率等。 田间实际作业是发现设计样机时未考虑到的实际问题的重要手段,也是测量各项指标能否符合育种小区农艺的主要方式。样机在田间播种0.45hm2花生,共30个小区,一个小区15m2,各项指标测试结果如表5所示。 表5 各项指标测试结果 由表5可以看出:各项指标测试结果符合国家标准。其中,出苗率不高是受当地气候环境的影响。对于小区种植农艺要求必须满足清种率达到100%的标准,故可以定义为播种质量满足花生小区种植的各项农艺标准要求。 根据山东地区育种小区种植农艺要求,设计了一台花生小区播种施肥机,能够实现开沟、施肥、起垄、播种、清种、覆土和覆膜多项工作一次作业,提高了在育种小区花生种植作业时的工作效率,缩短了种植时间。3.2 起垄装置的设计

3.3 覆膜装置的设计
4 排肥器和开沟器的设计
4.1 排肥器的设计


4.2 开沟器的设计

5 田间试验
5.1 田间试验设计
5.2 试验数据与结果
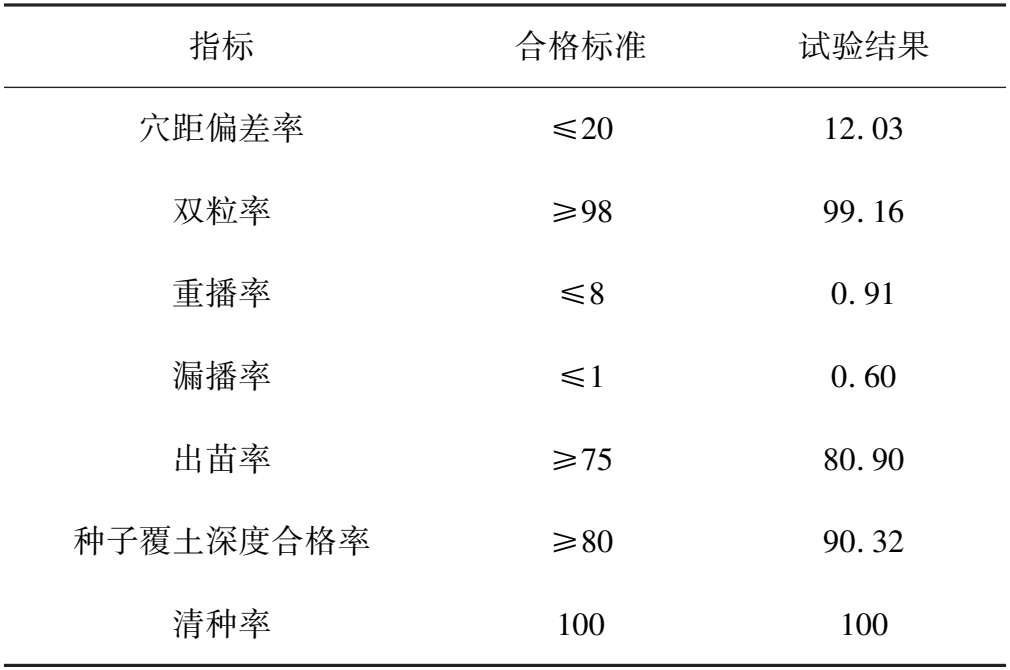
5.3 试验结果
6 结论
猜你喜欢
新疆农机化(2022年1期)2022-03-02
中医眼耳鼻喉杂志(2021年2期)2021-07-21
中阿科技论坛(中英文)(2021年2期)2021-03-17
时代农机(2019年5期)2019-02-11
农业工程学报(2018年24期)2019-01-14
农机化研究(2018年8期)2018-07-10
中国农业文摘-农业工程(2016年5期)2016-04-12
中国美容整形外科杂志(2015年11期)2015-08-09
中国医疗美容(2015年5期)2015-02-03
中国实用医药(2014年11期)2014-06-20