基于神经网络的滑模控制在水下机器人中的应用
2010-04-05 13:32刘和平陈永刚
河南科技大学学报(自然科学版) 2010年3期
李 敏 ,刘和平 ,陈永刚 ,刘 寻
(1.河南科技大学电子信息工程学院,河南洛阳 471003;2.洛阳理工学院机电工程系,河南洛阳 471023)
0 前言
人类与水下有关的活动绝大部分发生在浅水水域,用于浅水水域的无人遥控水下机器人的使用越来越广泛,由于水下机器人运动的强耦合、非线性及时变性,其控制问题一直受到研究人员的关注。而滑模变结构控制以及神经网络控制不需要得到目标的精确模型,对不确定干扰具有鲁棒性。施生达[1]和李殿璞[2]对潜艇的水动力特性进行了论述。Huang S J等[3]将切换函数作为RBF神经网络的输入进行学习并输出到滑模控制器中,实现了单输入单输出的神经网络滑模控制。Serdar Soylu[4]提出了一个无抖振滑模控制器用于水下机器人的推力定位。Man ZH等[5]用 RBF神经网络对非确定项进行自适应学习,为机器人机械手设计了一个稳定的自适应滑模控制器。刘金琨[6]对神经网络滑模控制器的仿真进行了研究。文献[7-8]采用模糊滑模控制方法和干扰模糊化滑模控制器研究了水下机器人的姿态控制。本文从水下机器人水平面内的运动着手,采用基于径向基(RBF)神经网络的上界自适应学习滑模控制方法对偏航角的控制进行了分析研究,并进行了仿真和实验。相对于传统的 PID控制方法,本方法具有调节时间短,超调量小的特点。
1 水下机器人动力学方程
本文仅对水下机器人水平面内的转动运动进行研究,水下机器人没有舵,仅靠推进器产生的力矩转动。对水下机器人运动建立固定坐标系eξηζ和原点位于艇体重心G的运动坐标系oxyz,如图1所示。

图1 固定和运动坐标系
水下机器人的空间六自由度运动在xoy平面内简化为:

其中:m为水下机器人质量;Jz为水下机器人绕z轴的转动惯量;u、v、r和u、v、r分别为纵向速度、横向速度、偏航角速度以及纵向加速度、横向加速度、偏航角加速度;X、Y分别为水下机器人在 x、y方向受到的水动力;N为绕z轴偏转时受到的水动力;XT、YT、NT分别为水下机器人螺旋桨在x、y方向和z方向产生的推力和力矩。
根据文献[2],假设流体为理想流体,水动力函数X、Y、N的状态量只考虑u、v、r、u、v、r,按照势流理论,水下机器人惯性水动力与其加速度和角加速度之间为线性关系,不含任何 u、v、r的高次项和 u、v、r与u、v、r的耦合项,将N进行泰勒展开并保留一阶项和零阶项。假设水下机器人处于静止状态,仅有后侧的 2个螺旋桨推进器产生纯转矩来改变航向。由于水下机器人 V速度低,水平转动运动中产生的耦合升沉、纵倾和横倾比较小,忽略不计,这样u、v、u、v均为0,控制量仅有NT。
式中:N0为水下机器人以工作点参数运动时受到的绕z轴的水作用力矩r为水下机器人在工作点状态下作绕z轴的角加速运动r时受到的绕z轴的水作用力矩;Nr为相应的水动力系数;Nrr为水下机器人在工作点状态下作绕z轴的匀角速运动 r时受到的绕z轴的水作用力矩;Nr为相应的水动力系数。
2 滑模变结构控制
在一般的滑模控制中,为了保证系统达到切换面,在设计控制律时,要求系统非确定部分的范围是已知的,但是对于水下机器人这样的强耦合非线性系统,这个要求难以达到。对于未知参数和干扰变化的非确定性,可以通过神经网络的方法进行学习,从而估计出未知参数和干扰变化的最大值。
设航向角控制方程为:

令M=b-1,h(φ,φ)=-b-1f(φ,φ),d(t)=b-1fd,则式(2)可以改写为:


设控制u由名义模型控制器u1和补偿控制器u0组成,可以得到:

如此,整个系统就分成了名义模型和非确定部分,采用神经网络作为滑模控制中动态可调的补偿控制器对非确定部分进行控制,对于确定部分则采用状态反馈增益方法对名义模型进行控制,就不需要水下机器人的精确动力学控制模型来对水下机器人航向角进行控制。
设 φd为 期望的航向角,φd为 期望的航向角速度,则有:

状态反馈增益为K=[-k1-k2],e=[e1e2]T。

定义滑模切换面为S=ce1+e2,则有:

取补偿控制器为:

3 RBF神经网络自适应学习
径向基函数即 RBF神经网络结构是由输入层、一个隐含层和一个线性输出层构成的前向网络,隐含层采用径向基函数作为网络的激活函数,可以避免像 BP学习算法那样冗长的迭代计算过程和陷入局部极值的可能,而且学习速度快,逼近精度高。这里采用高斯型函数,

式中:Pj为第j个节点的高斯激活函数;gj是第j个节点高斯函数的中心;σj为第j个节点的基宽参数;wj为第j个节点的权重系数;X=(x1x2…xf)T为输入向量;P=(p1p2…pj)T为径向基向量;gj= (gj1gj2…gjr)T为节点j的中心向量;σ=(σ1σ2…σj)T为基宽向量;W=(w1w2…Wm)T为权向量。
网络输出的数学表达式为:ya=WTP=w1p1+w2p2+…+wmpm。

此为一组以 wj为变量的线性方程组,设定学习速率和动量因子,通过迭代将其得到。

其中WT为网络RBF的权值。设W为最优权值,并且WP(x)-ρ(t)=ε(x)<ε1。
学习速率:

4 仿真
根据以上分析,对基于径向基神经网络的水下机器人航向角上界自适应学习滑模控制方法进行跟踪仿真[9]。

图2 角度跟踪
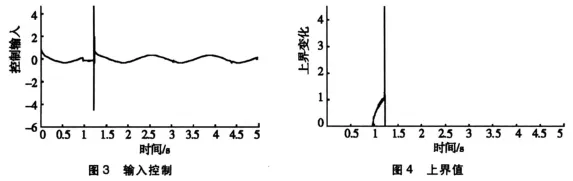
高斯函数隐含层单元数取 3,输入状态初值为[1,0],学习速率取 0.4,动量因子取0.05,非确定部分取 0.2+0.5cos(0.5πt),输入指令为sin(1.5πt)。取状态反馈增益k1=150,k2=300,滑模控制系数 c=25,由式(8)、式(11)的控制方程及式(19)的自适应学习方程,取 ε1= 0.001,ε2=0.002,仿真结果见图2图4。曲线 2为输入信号,曲线 1为跟踪信号。
可以看出,经过 1.25 s后,系统的跟踪可以满足要求。但是这个性能和初始状态有关。
5 实验

图5 水下机器人方向控制实验
将此控制模型用于水下机器人试验平台,该水下机器人全配质量m=172 kg,转动惯量Jz=17.72 kgm2,附加了3DM-GX1三维姿态传感器,这种产品可以综合3个角速率陀螺仪,3个正交的加速度计和 3个正交的磁力计的测量数据,从而在静止或动态的条件下提供稳定的方向信息。在静态水池中对航向角进行控制,水池水深2.5m,水下机器人经过配重保持在深度0.5 m的水中,保持全浸状态,航向角设定值为 80°、110°、150°、90°,共计 4次试验,令水下机器人进行自动航向保持控制,航向角度保持控制基本满足要求,调节时间约为 10 s,具有一定的重复性,但是调整时间比较久,见图5。转向实验中,同时产生了纵倾与横倾耦合运动,幅值不大于 3°。
6 结束语
以上提出将 RBF神经网络自适应学习方法与滑模变结构方法结合对水下机器人航向角进行控制,通过分析、仿真和试验,说明该方法的可行性。由于是在静态浅水池中进行试验,水流的干扰比较小,进一步的工作是在动态的较深河流中,加入流速再进行进一步的试验,以完善这种控制模型。由于模型的推导过程中忽略了横倾角和纵倾角的影响,对于有一定波浪的水体,还需要作进一步的分析和试验。
[1] 施生达.潜艇操纵性[M].北京:国防工业出版社,2005.
[2] 李殿璞.船舶运动与建模[M].哈尔滨:哈尔滨工程大学出版社,2008.
[3] Huang S J,Huang K S,Chiou K C.Development and App lication of a Novel Radial Basis Function Sliding Mode Controller [J].Mechatronics,2003,13(4):313-329.
[4] Soylu S,Buckham B J,Podhorodeski R P.A Chattering-free Sliding-mode Controller for Underwater Vehicles with Faulttolerant Infinity-norm Thrust Allocation[J].Ocean Engineering,2008,35(16):1647-1659.
[5] Man Z H,Yu X H,Eshraghian K,et al.A Robust Adaptive Sliding Mode Tracking Control Using an RBF Neural Network for Robotic Manipulators[C]//IEEE International Conference on Neural Networks.1995:2403-2408.
[6] 刘金琨.滑模变结构控制与仿真[M].北京:清华大学出版社,2005.
[7] Liu H P,Gong Z B,Li M.The Anti-wave Control of Small Open-frame Underwater Robot[C]//Proceedings of the 3th International Conference on Intelligent System&Knowledge Engineering(ISKE2008).Xiamen,1718,November,2008: 739-744.
[8] Liu H P,Gong Z B.Disturbance Fuzzy Approach-based Sliding Mode Control on the Working Attitude Ad justing Device of ROV[C]//Proceedings of the 2009 International Asia Conference on Informatics in Control,Automation and Robotics, (CAR 2009).Bankok,Thailand.12,February,2009:235-239.
[9] 刘和平,龚振邦,李 敏,等.水下机器人浪涌中横摇角的模糊滑模控制[J].武汉理工大学学报,2009,31(14):122-125.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
新世纪智能(高一语文)(2021年3期)2021-07-16
电子制作(2019年19期)2019-11-23
民用飞机设计与研究(2019年4期)2019-05-21
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
电子制作(2017年24期)2017-02-02
重型机械(2016年1期)2016-03-01
大连工业大学学报(2015年4期)2015-12-11