
空域交通复杂度计算方法研究
2010-07-31 11:37戴福青洪兰收
中国民航大学学报 2010年3期
戴福青,洪兰收
(中国民航大学空中交通管理学院,天津 300300)
随着空域流量的增加,管制员工作负荷不断增大,管制员的工作负荷已经发展成为制约扇区容量的重要因素。国外的大量研究(Hurst&Rose[1],Mogford[2],Laudeman[3])认为,空域的复杂性产生并决定了管制员的工作负荷。
1998年,Laudeman[3]构建了动态密度模型来计算管制扇区的复杂度,但此方法只能对某一特定扇区进行分析,不具推广性;2000 年 Delahaye、Puechmorel[4]认识到动态密度模型的局限性,他们从飞机的位置和速度入手,研究扇区复杂性的内在因素,从几何学的角度分析空域的复杂性,取得一定的进展;Majumdar和Ochieng[5]统计分析了欧洲57个扇区,研究表明每个扇区都有其固有的影响扇区复杂度的因素。
对于空域的复杂度,Meckiff[6]等人将其定义为“管制员所面对管制状况的复杂程度”。Mogford[7]等人提出“复杂度是一个多维多层次的概念,其包括静态的扇区特点和动态的流量特征”。综合以上的观点,本文认为空域复杂度由空域结构复杂度和空域交通复杂度两部分组成[8]。空域结构复杂度由空域的几何特点决定,例如,地形高度、可用空域、交叉航路、导航设施、相邻扇区以及运行程序。空域交通复杂度由空域中的交通状况决定,测量中最常用的指标是空域内飞机的数量。飞机的数量是基本指标,因为诸如飞机移交、进程单填写等必要的动作和每架飞机都相关联。Parimal Kopardekar[9],何毅[10]在研究空域交通复杂度指标时还选取了爬升下降的飞机数量、飞机机型混合的程度、军机的数量、复杂飞机航线的数量;Anthony[11]在研究时选取了一定距离范围内的飞机的数量、平均扇区移交时间、飞机之间的最小间隔等因素作为研究指标。
本文将主要对空域的交通复杂度进行分析研究,寻找更合理的计算方法。
1 释义
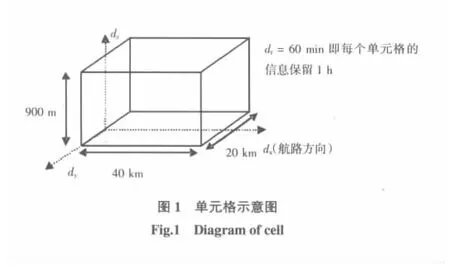
计算单元:为便于计算,用单元格将空域分开,通过计算每个单元格的各个指标值,最后容易得出整个空域的复杂度指标和空域复杂度的分布情况。单元格的空间参数(dx,dy,dz)和时间参数(dt)如图1所示。由于中国区域管制空域航路宽度为20 km[12],民航飞机需要沿航路飞行,因此为了方便计算,按照航路的走向划设单元格,航路两边各取10 km为dy方向的宽度(对于包含交叉航路的单元格,dy方向上取40 km),在dx方向上取40 km,dz方向上取900 m,即包含三个飞行高度层(处于相邻高度层上的飞机,管制员需时刻监视其状态,对于需要上升或下降的飞机,管制员先判定其需穿越的高度层和目的高度层是否有飞机占用;而对于平飞的飞机,管制员要监视其是否误操作或听错指令,导致上升/下降高度)。每个单元格的计算数据是采集连续1 h的雷达交通数据,计算采用雷达间隔标准。
飞行时间:飞机A在给定单元(一个或者多个连续单元格)飞行的时间,用Ta表示。
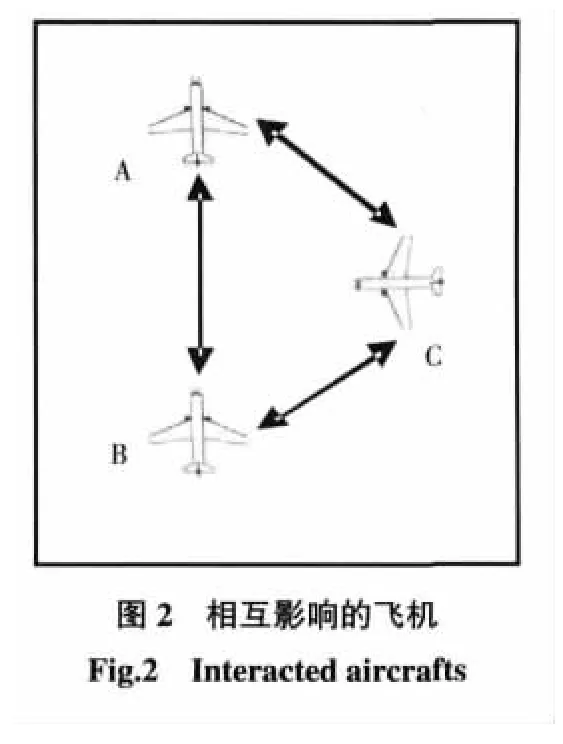
相互影响:在统计时间内的任意时刻,如果两架或几架飞机同时出现在单元格内,就认为每两架飞机之间有相互影响。
相互影响的时间:两架飞机同时在单元格内所持续的时间即为相互影响的时间,即两飞机在单元格内的飞行时间的交集,用Ta∩Tb表示。
如图2所示,在统计时间内一时刻A、B、C三架飞机同时出现在该单元格内,我们认为这三架飞机之间,两两相互影响。假设A与B、A与C之间飞行时间的交集为1 min,B与C之间飞行时间的交集为2 min,那么该单元格内,飞机的相互影响时间之和为

2 复杂度计算
在空中交通管制服务中,服务的对象是空域内每一架飞机。管制员要根据飞机预计到达时间、飞行高度层、目的机场、机型等做好管制预案;飞机进出扇区之前都需要管制移交;飞机进入扇区后需要雷达辨识;飞机飞行过程中需要管制员要时刻关注空域内飞机的飞行状态动向。因此,通过该空域的飞机数量直接决定着管制员的工作负荷。飞机的爬升下降、交叉或逆向飞行、不同机型的速度差别等因素增加了空域交通的复杂程度性。因此,空域的交通复杂度TC(Traffic Complexity)为

其中:N为扇区的飞机的数量;θ为复杂度因子。
对一个单元格来说,N值为1 h内通过的飞机数量,下面还将对N值进行密度修正。θ为与飞机飞行状态、交通流结构、飞机机型混合等因素有关的一个值。
2.1 交通密度
交通密度是用来测量单位时间内单位空域的交通数量。在一些文献中,采用的是单位飞行时间内飞机数量与空域体积的比值[9,13],这样的算法没有考虑飞机是均匀分布在整个空域还是集中在局部区域(最繁忙的扇区)或是集中在某一个时段(高负荷工作时段)。飞机在时间、空间上的分布密度以及飞机的相对位置决定了冲突发生的多少,影响着管制员辨识冲突的难度和解决冲突的策略,从而影响管制员的的工作负荷。因此这种计算方法存在着不足[14]。本文对单元格的原始飞机数量进行如下了修正。
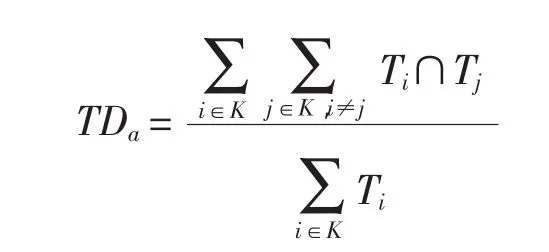
交通密度的修正系数等于相互影响的时间和飞行时间的比值
修正的交通密度系数=相互影响的时间/飞行时间
设K为空域中一单元格,在1 h内,飞机在单元格飞越的时间为Ti,那么该单元格交通密度修正值(adjusted traffic density)
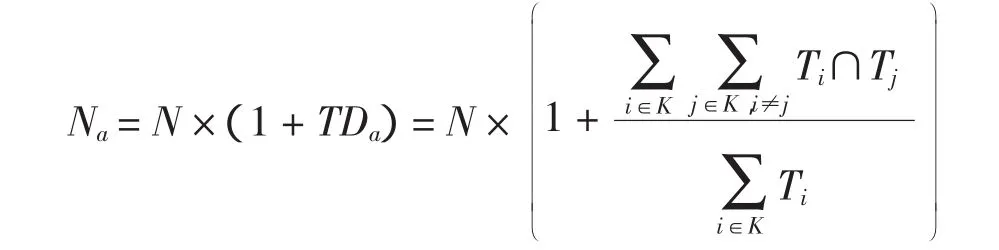
修正后的单元格飞机数量Na为
2.2 飞机飞行状态
飞机需要管制员的许可,才可以爬升或下降至所需高度。在管制员给飞机发改变高度出许可时的时候,管制员需要确保飞机所穿越飞行高度层具备足够的间隔。因此,飞机在爬升/下降期间占据更多的空域,增加了空域的复杂性。
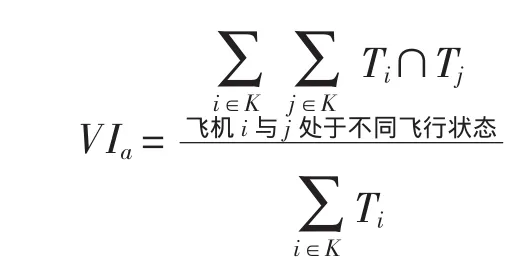
为了说明单元格内飞机处于不同的飞行状态(爬升、平飞、下降)产生的复杂度,引进垂直方向上的相互影响这个概念。当两架飞机同时在一个单元格中出现,并处在不同的飞行状态(爬升、平飞、下降),它们在垂直方向上就有相互影响。
每架飞机的飞行状态以飞机进入单元格时的飞行状态来界定。
类似于交通密度,飞机的飞行状态的影响系数定义为垂直方向上相互影响的时间与飞行时间的比值。
飞机飞行状态影响系数=垂直方向上相互影响的时间/飞行时间
设K为空域中一单元格,在1 h内,飞机i在单元格飞越的时间为Ti,那么该单元格飞机飞行状态影响值(adjusted vertical interaction)
2.3 飞机交通流的结构
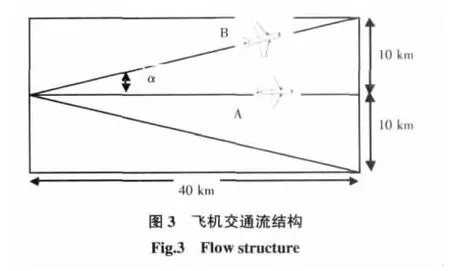
如果空域中所有的飞机以同样的速度同样的方向飞越管制扇区,飞机交通流的结构就相对简单。相反,如果飞机交通流有交叉或者航路是双向飞行航路,就认为飞机交通流的结构相对复杂。复杂的交通流结构增加了交通的复杂性,使得飞行冲突增多,管制员工作负荷增加。
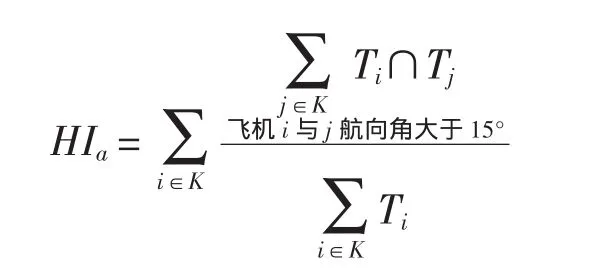
为了说明单元格内飞机航向不同产生的复杂度,引入水平方向上的相互影响这个概念。当两架飞机同时在一个单元格中出现,并且航向不同时,其在水平方向上有相互影响。每架飞机的航向以飞机进入单元格时的航向来界定。如图3所示,当飞机A与飞机B分别沿所示方向飞行,角度差为,飞出单元格时的侧向间隔为10 km(雷达间隔标准),两飞机航向之间的角度夹角小于α时,两机为同向飞行。此时α=arctan(10/40)=14.04°。因此两架飞机的航向夹角相差小于15°时,两飞机是同向飞行,大于15°时,两飞机有水平方向的相互影响。
飞机的交通流结构影响系数定义为水平方向上相互影响的时间与飞行时间的比值。
飞机的交通流的结构影响系数=水平方向上相互影响的时间/飞行时间
设K为空域中一单元格,在1 h内,飞机i在单元格飞越的时间为Ti,则飞机交通流结构影响值(adjusted horizontal interaction)
2.4 飞机机型混合
在一个空域出现具有不同性能的飞机,使得管制员辨识和解决飞机冲突的难度增加,从而增加了交通的复杂程度,影响了管制员的工作负荷。如同一高度层,前后两机相距50 km,后机的速度快于前机,两机之间就会有潜在的追赶冲突。
为了说明单元格内飞机的速度不同所引发的复杂度,引进速度的相互影响这个指标。
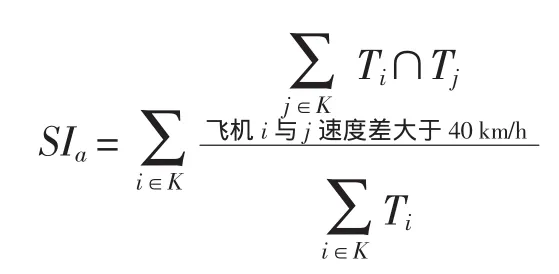
当两架飞机同时在一个单元格中出现,并且两架飞机的航速相差大于40 km/h,其在速度上有相互影响。
飞机机型混合的影响系数定义为速度上有相互影响的时间与飞行时间的比值。
飞机机型混合影响系数=速度上相互影响的时间/飞行时间
设K为空域中一单元格,在1 h内,飞机i在单元格飞越的时间为Ti,则飞机机型混合影响值(adjusted speed interaction)
2.5 空域交通复杂度
单元格K的交通复杂度(traffic complexity)的结果等于

其中:Na为单元格内飞机数量的修正值;θ为复杂度因子;TDa为交通密度修正系数;VIa、HIa、SIa分别为飞机飞行状态、交通流结构、机型混合影响系数;(Ti∩Tj)VI为在垂直方向上两机有相互影响的时间;(Ti∩Tj)HI为在水平方向上两机有相互影响的时间;(Ti∩Tj)SI为在速度上两机有相互影响的时间。
3 计算结果
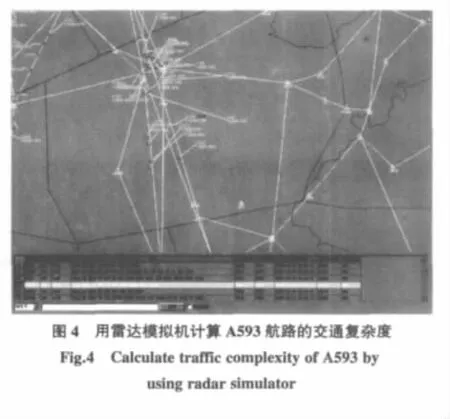
本文采用雷达模拟机中的飞行数据,对一空域的交通复杂度进行测算。
单元格选取是3 800 m到12 000 m包含了从3 900 m到11 900 m共27个飞行高度层。其中,由于实行RVSM,8 400 m飞行高度层与8 900 m飞行高度层相差500 m,因此,8 300~9 300 m的单元格高度选取了1 000 m。以保证每个单元格内有三个高度层。
对该空域的主干航路A593航路进行分析,统计的1 h内,通过此航路的飞机共30架次,该航路的交通复杂度分布结果如表1、图4所示。
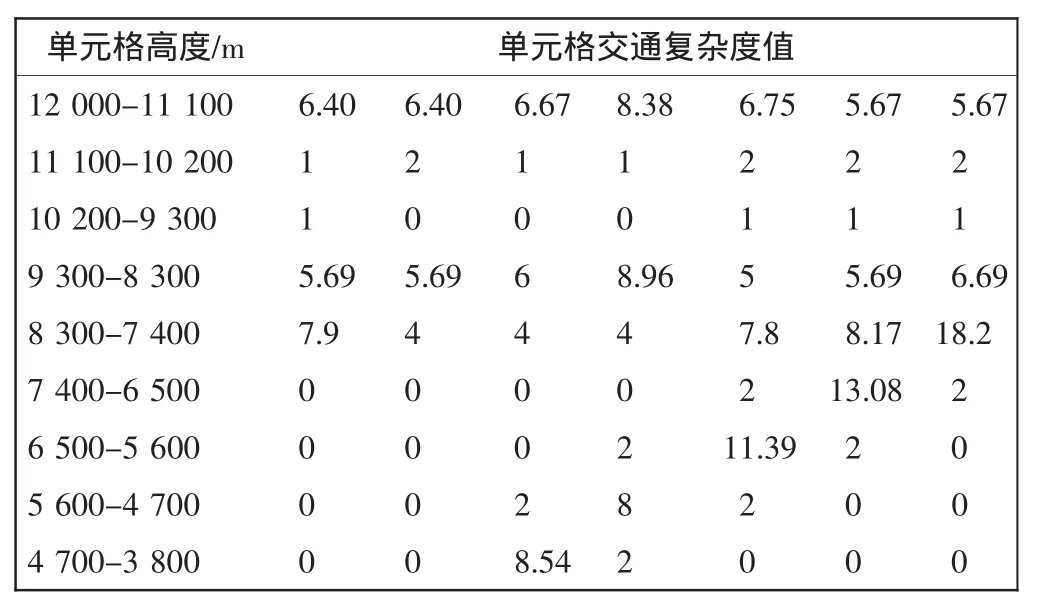
表1 航路A593交通复杂度分布Tab.1 Traffic complexity distribution of A593
其中,每1行表示沿航路划设的7个单元格,每1列表示垂直方向上划设的单元格。中间的数值表示每个单元格的交通复杂度值。
从表1可看出,该空域的飞机主要集中在11 300 m~11 900 m的飞行高度层和7 500 m~9 200 m的飞行高度层。这些高度层的飞性冲突较大。在中低空的几个斜向连续单元格中,复杂度也远远高于其他单元格,这是由于该航段是飞机爬升下降的主要航段。
4 结语
本文分析了交通复杂度相关的因素,空域内飞机的数量通过空域交通密度进行了修正,使得复杂度计算更具合理性;通过对飞机飞行状态、交通流结构、机型混合等因素的分析,确定了复杂度因子,得出了交通复杂度的计算方法并具有可行性。
通过雷达模拟机分析的算例可以看出,复杂度的计算可以对管制工作有很好的指导作用。对于管制员,有助于更好的认知空域,更合理的利用空域;对于空域管理者,有助于合理规划空域,提高空域利用率。
对空域本文的研究还有很多不足之处,一方面空域交通复杂度的复杂程度衡量标准没有确定,有待于通过多个空域的复杂度计算得出;另一方面本文的计算没有涉及到空域交通复杂度的预测,还有待于进一步的研究。
[1]HURST M W,ROSE R M.Objective job difficulty,behavioral response,and sector characteristics in air route traffic control center[J].Ergonomics,1978,21:697-708.
[2]MOGFORD R H,GUTTMAN J A.Morrow.The Complexity Construct in Air Traffic Control:A Review and Synthesis of the Literature(DOT/FAA/CT-TN95/22)[Z].Atlantic City:FAA Technical Center,1995.
[3]LAUDERMAN I,SHELDEN S.Dynamic Density:An Air Traffic Management Metric,Report NAS/TM-1998-112226[R].Ames Research Center,Moffett Field,California:NASA,1998.
[4]DELAHAYE D,PUECHMOREL S.Air Traffic Complexity:Towards Intrinsic Metrics[C]//Presented at the3rd FAA/EUROCONTROL ATM R&D Seminar,Naples Italy,June 13-16,2000.
[5]MAJUMDAR A,OCHIENG W Y.The Factors Affecting Air Traffic Controller Workload:A Multivariate Analysis Based Upon Simulation Modeling of Controller workload[G].London:Center for Transport Studies,Imperial College,2000.
[6]MECKIFF C CHONE.The Tactical Smoother for Multi-Sector Planning[C]//Proceedings of the 2nd FAA/EUROCONTROL ATM R&D Seminar.Orlando,Florida,Dec 1998.
[7]MOGFORD R H,MURPHY.The Use of Direct and Indirect Techniques to Study Airspace Complexity Factors in air Traffic Control[C]//Proceeding of the 1st Mid-Atlantic Human Factors Conference,1993:196-202.
[8]GANO B CHATTERJI,BAMAVAR SRIDHAR.Measure for Air Traffic Controller Workload Prediction[C]//1st AIAA Aircraft Technology Integration and Operations Forum,2001.
[9]PARIMAL KOPARDEKAR,ALBERT SCHWARTZ.Airspace Complexity Measurement:An Air Traffic Control Simulation Analysis[C]//US/Europe 7th Air Traffic Management Seminar,2007.
[10]何 毅.空中交通复杂度参数模型的研究[D].上海:同济大学,2007.
[11]ANTHONY J MASALONIS,MICHAELB.Dynamic Density and Complexity Metrics for Realtime Traffic Flow Management[C]//5thSeminar Budapest,Hungary,2003.
[12]中国民用航空总局.民用航空使用空域办法[S].2004.
[13]LAUDEMAN I V,SHELDEN S G.Dynamic Density:An Air Traffic Management Metric,NASA/TM-1998-112226[R].
[14]ACE Working Group on Complexity.Complexity Metrics for ANSP Benchmarking Analysis[M].Brussels,Belgium:Eurocontrol,2006.
猜你喜欢
西安航空学院学报(2022年5期)2023-01-04
中国交通信息化(2022年9期)2022-10-28
中国交通信息化(2022年5期)2022-07-23
南北桥(2022年2期)2022-05-31
中国民航大学学报(2019年1期)2019-04-13
航空学报(2018年12期)2019-01-18
新商务周刊(2018年15期)2018-12-06
电脑知识与技术·经验技巧(2017年9期)2018-02-24
航空知识(2017年2期)2017-03-17
中国民航大学学报(2015年3期)2015-03-01
