
基于粒子群算法的永磁同步电机模糊控制研究
2010-09-23 06:06乔维德
湖南工业职业技术学院学报 2010年6期
乔维德
(江苏城市职业学院常州学院,江苏 常州 213001)
20
基于粒子群算法的永磁同步电机模糊控制研究
乔维德
(江苏城市职业学院常州学院,江苏 常州 213001)
为提高永磁永磁同步电机伺服系统控制性能,提出了基于粒子群优化 (PSO)算法的永磁同步电机模糊控制的设计方法,即应用 PSO算法全局优化模糊控制器的 ka、kb、ku参数和控制规则,提高模糊控制器的控制性能和效果。仿真实验结果表明,优化后的模糊控制器的动、静态性能均优于常规 PID控制,具有较高的鲁棒性和控制精度。
永磁同步电机;粒子群算法;模糊控制器;PID控制
一、引言
永磁同步电动机 (PM SM)具有体积小、损耗低、效率高、可靠性好等优点,目前在电气传动系统中得到广泛的应用。但由于它的多变量、严重非线性、参数时变及强耦合性,往往还受到负载干扰、自身的非线性等不确定因素影响,导致其抗干扰能力差,影响 PM SM控制性能。传统的 PID控制是以被控对象的数学模型为设计依据,尽管其控制算法简单、鲁棒性好,并有一定的控制精度,但它毕竟是一种线性控制,不能很好地满足存在严重非线性的 PM SM系统高精度、快响应的要求。为此,本文提出一种基于粒子群优化 (PSO)算法的永磁同步电机模糊控制新方法,即利用粒子群算法对模糊控制器的参数进行优化,实现模糊控制器参数的在线调节,改善控制器性能。仿真与实验结果表明,该方法具有超调小、鲁棒性强、抗干扰能力好等优点,其动静态性能均优于传统 PID控制。
二、粒子群优化算法
粒子群优化算法 (Partic le Swarm Op tim ization,简称 PSO)是由美国 Kennedy博士和 Eberhart博士于 1995年提出的一种基于体的具有全局寻优能力的优化工具,它来自于对鸟群的捕食行为的模拟和启发,并用于解决优化问题.这种优化算法比遗传算法操作简单,没有遗传算法的交叉.变异等操作,参数容易调整,并具有记忆粒子最佳位置的能力,它通过迭代搜寻最优值.假设在一个 d维搜索空间中,有 m个粒子组成一个群体,第 i个粒子在 d维空间的位置表示为 Xi=(xi1,xi2,…,xid)(i=1,2,…,m),第 i个粒子速度即粒子改变位置的速率记为Vi=(vi1,vi2,…,vid),第 i个粒子经历过的最优位置 (有最好适应度)即个体极值记为 Pbest=(P1,P2,…,Pd),群体所有粒子经历过的最优位置即全局极值记为 Gbest=(G1,G2,…,Gd)。在每一次迭代中,粒子通过跟踪这两个最优值来更新自己。在找到这两个最优值时,粒子根据公式 (4)、(5)分别对自己的速度和位置进行迭代更新,直至满足迭代终止条件。迭代终止条件根据具体问题,一般选取为最大迭代次数或者粒子群迄今为止搜索到的最优位置满足预定的最小适配值。

式中,=1,2,…,d,t为迭代次数;Xij(t)为粒子第 t代当前位置;Vij(t)为粒子第 t代 (循环)的速度;ω为非负数,称为惯性权因子,通常取 0.8-1.2之间,是控制速度的权重;C1、C2为正的加速常数,分别调节向全局最优粒子和个体最优粒子方向飞行的最大步长,通常取 C1=C2=2;R1、R2为介于 [0,1]区间的随机数。
PSO算法的惯性权重ω的选择直接影响算法的收敛性.当ω较大时,粒子的全局搜索能力强;当ω较小时,粒子主要在当前解的附近搜索,局部搜索能力强;当ω=0时,粒子就失去记忆性。而且 PSO算法容易“早熟”,并且粒子在解空间搜索时有时在全局最优解附近会出现振荡现象。为避免这个问题,文献[1]提出将ω设置为从最大惯性权重到最小惯性权重线性减小的办法,但这需要通过反复试验才能确定ω的最大值ωmax、ωmin和最大迭代次数,而且当问题越复杂时,在迭代后期全局搜索能力不足,导致很难找到适应于每个问题的最优解。为此本文在文献[2]基础上,提出了一种改进的非线性动态自适应粒子群优化算法,以实现ω能够随适配值自动改变。惯性权重ω的计算公式为:

公式中,ωmax、ωmin分别代表惯性权重的最大值和最小值;f为粒子适配值;fave为每代粒子的平均适配值;fmax为粒子群中最大适配值。
三、基于粒子群算法优化的永磁同步电机模糊控制
1.永磁同步电机模糊控制系统结构
图 1给出基于粒子群算法优化的永磁同步电机模糊控制系统结构图。本系统为双闭环控制,内环为电流环,仍采用恒定 PID参数进行调节,外环为转速环,采用基于 PSO算法优化的模糊控制器的控制方法。采用 PSO算法对常规模糊控制器的 3个参数进行 ka、kb、ku调节和优化,改善控制器动静态性能,从而满足永磁同步电机伺服系统和调速驱动系统快速性和精度性要求。
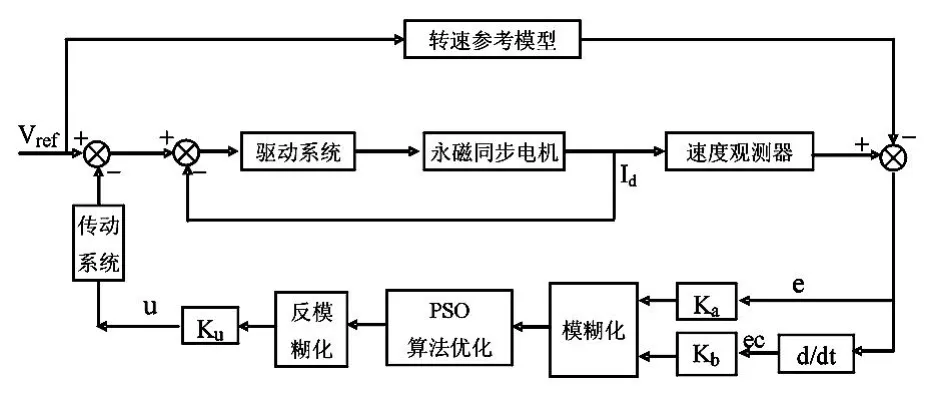
图 1 永磁同步电机模糊控制系统结构图
2.模糊控制器结构与实现
本文构造了以电机给定速度与实际检测速度的偏差 e及其偏差变化率 ec作为模糊控制器的输入,u作为模糊控制器的输出控制量的二维模糊控制器,ka、kb分别为 e和 ec的量化因子,ku为控制量 u的比例因子。模糊控制器的 e、ec和 u都选用 7个模糊子集,即{负大,负中,负小,零,正小,正中,正大},并记为{NL,NM,NS,ZO,PS,PM,PL}。如果定义永磁同步电机逆时针方向旋转为正,顺时针方向旋转为负,则该控制器的输出取决于每个采样周期的 和 ec。结合对无刷电机的调速经验,可以生成 49条模糊推理用模糊规则,如表 1所示。
3.粒子群算法优化模糊控制器
由于永磁同步电机本身是非线性的,当发生饱和、扰动、参数变化时,如果仍按上述获得的模糊控制规则对其进行控制,将直接影响控制器的控制效果。本文采用 PSO粒子群优化算法在线自动调节和修改模糊控制规则和控制器参数 ka、kb、ku,取得了较好的稳定性和控制精度.表 2为经过 PSO优化后的模糊控制规则。从表中可以看出,被淘汰取消的控制规则有 5条 (用空白表示),被优化成较好的控制规则有 3条 (用方框标示)。
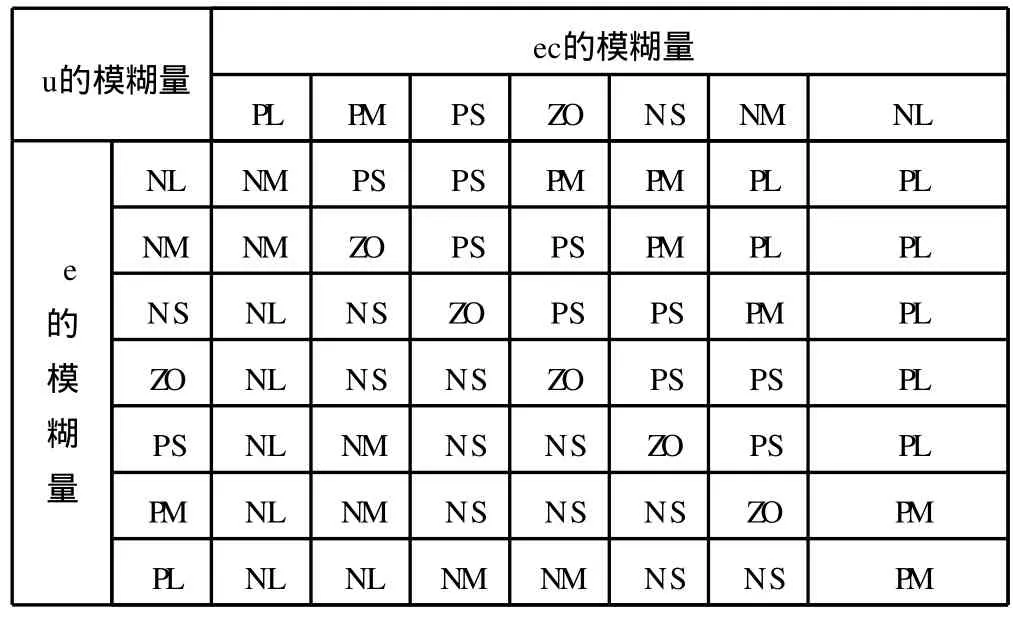
表 1 模糊控制规则表
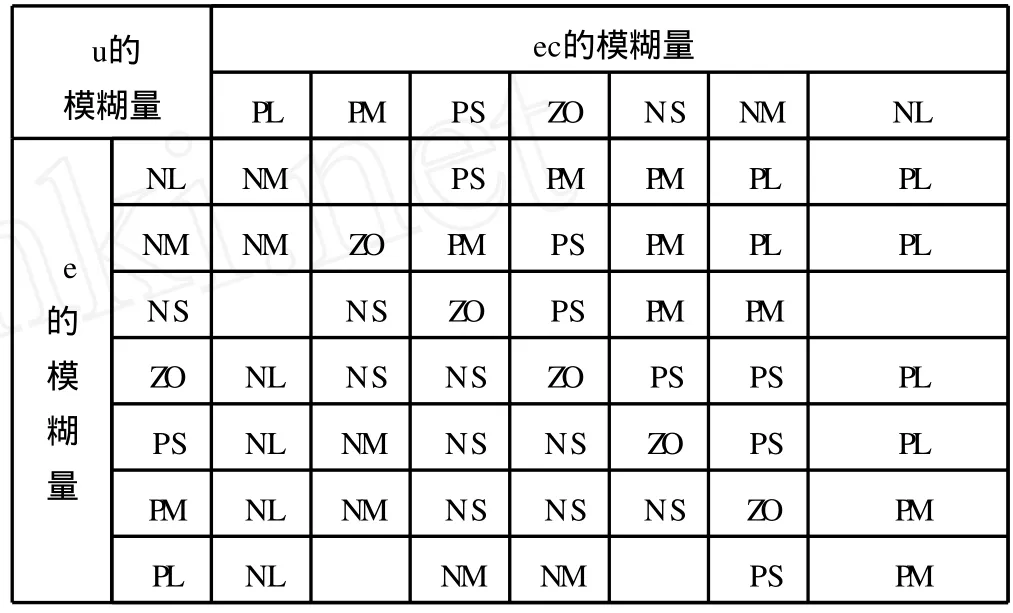
表 2 模糊控制规则表
PSO优化模糊控制器参数 kakbku的方法如下:
将整个解空间划分为 7个区域,给每一个区域的速度和位置 Ki=[ka,kb,ku]T在允许范围内随机赋以初值,此时个体极值为初始位置的值 Pbest,群体最优位置的全局极值 Gbest为 7个区域中使得 e最小的个体极值,并记录个体极值所处的区域号.
让初值代入④式和⑤式求得新的速度和位置,然后检验适配值函数 fi,寻找新的个体极值,并与全局极值作比较,如果新的个体极值比上一次的全局极值更优,则替换为新的全局极值.
按同样方法,粒子在整个解空间不断进化寻找最优解,直至满足预定的目标函数 (如 e≤0.001),此时粒子所处的位置便是模糊控制器参数 ka.kb.ku的最优值.否则重新返回至步骤(2).
四、仿真实验分析
为了证实所提控制方案的有效性,本文利用 M atlab+Sim u link对基于粒子群算法优化的模糊控制器进行计算机仿真分析,并与普通 PID控制进行比较。仿真中永磁同步电动机参数为:额定功率 1.5KW,额定相电压 220V,额定转速 2100 r/m in;定子 d轴电感 Ld=0.027H,q轴电感 Lq=0.067H,定子相绕组电阻 Rs=4.495Ω,转动惯量 J=0.00179kg·m2,极对数为2。图 2表示采用 PID控制器控制并在 t=0.03S时突加负载情况下的电机速度仿真曲线;图 3表示采用 PSO优化的模糊控制器控制而且同样在 t=0.03S时突加同一负载的电机速度响应曲线 (时间起点为 t=0S)。
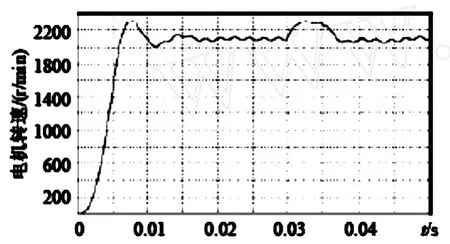
图 2 采用 PID控制器转速仿真曲线
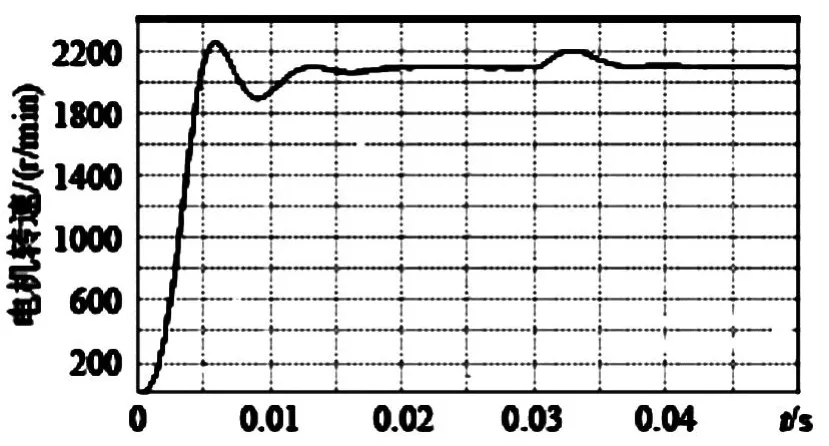
图 3 采用 PSO优化的模糊控制器转速仿真曲线
从永磁同步电机的速度仿真曲线可以看出:利用 PSO优化的模糊控制的电机转速响应快、超调小、转速波动小、抗干扰能力强,其性能明显优于传统的 PID控制,具有优良的静态和动态性能。
最后,以 TI公司的数字信号处理器 TM S320LF2407A为主控制器对永磁同步电机进行实验,其硬件系统控制结构框图如图 4所示。通过实验现场测试,采用 PID控制器和 PSO优化后的模糊控制器控制电机的实测转速曲线基本与前面计算机仿真曲线一致,验证了本文设计的优化模糊控制器能很好地抑制超调、负载扰动和转速波动等,具有很强的鲁棒性和动态响应能力,取得了较高的控制精度。
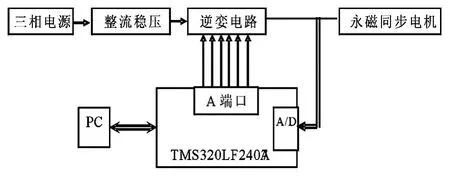
图 4 系统控制框图
五、结语
本文讨论了基于粒子群算法优化的永磁同步电机模糊控制器的设计方法,该方法应用粒子群算法优化模糊控制器的控制规则及其参数,增强了模糊控制的自适应能力和鲁棒性。仿真和实验结果表明:经 PSO优化后的模糊控制器的控制性能优于传统 PID控制,取得了较好的控制效果,从而为今后分析永磁永磁同步电机和对其控制策略的研究提供了一条比较新颖的思路和方法。
[1] 杨维,李歧强.粒子群优化算法综述[J].中国工程科学,2004,6(5):87-94.
[2] 夏晓华,刘波,栾志业,等.基于 PSO的预测控制及在聚丙烯中的应用[J].控制工程,2006(5):401-402.
[3] 王丽梅,田明秀,王力.永磁同步电动机的神经网络模糊控制器设计[J].电气传动,2006,36(8):34-37.
[4] 龚晓峰,薛琪伟.神经网络和模糊算法相结合的永磁同步电动机的鲁棒控制[J].电机与控制应用,2005,32(3):14-17.
Research for Perm anen tM agnet SynchronousM otor Fuzzy Con tro l Based on Par tic le Swarm O p tim iza tion
Q IAOW ei-de
(Changzhou Schoo l,Jiangsu City Vocational Co llege,Changzhou,213001 Jiangsu)
In order to imp rove contro lperformance for Permanentmagnetsynchronousmotor servo system s,thispaperp roposed designmethod forpermanentmagnet synchronousmotors based on particle swarm (PSO)algorithm and fuzzy control,that global op tim ization ka,kb,ku parametersof fuzzy controllerand control rulesw ith app lication PSO algorithm,to imp rove contro lperformance and effectiveness for fuzzy contro ller.Simu lation results show that,static and dynam ic perform ance for op tim ized fuzzy controller is better than General PID contro l.,it has high robustness and controlp recision.
perm anentm agnet synchronousmotor;particle sw arm op tim ization;fuzzy con tro ller;PID contro l
TH 7
A
1671-5004(2010)06-0001-02
2010-12-06
乔维德 (1967-),男,江苏城市职业学院教授,研究方向:智能控制等。
猜你喜欢
新世纪智能(数学备考)(2021年10期)2021-12-21
河北理科教学研究(2020年3期)2021-01-04
防爆电机(2020年6期)2020-12-14
中学数学杂志(2019年1期)2019-04-03
光学精密工程(2016年3期)2016-11-07
广东技术师范大学学报(2016年5期)2016-08-22
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
电源技术(2015年11期)2015-08-22
