带测量噪声干扰的无人驾驶汽车路径跟踪控制
2010-11-02 03:19贾新春贾祝融成婷婷
山西大学学报(自然科学版) 2010年3期
李 雷,贾新春,贾祝融,成婷婷
带测量噪声干扰的无人驾驶汽车路径跟踪控制
李 雷,贾新春,贾祝融,成婷婷
(山西大学数学科学学院,山西太原030006)
提出了一种带有Kalman滤波器的最优预测控制结构,用于无人驾驶汽车的路径跟踪控制.无人驾驶汽车对道路环境与车体状态的感知一般通过GPRS、雷达、摄像机、陀螺仪等获得,测量过程往往带有噪声.带有Kalman滤波的最优预测控制器,与不考虑噪声干扰的最优预测控制器相比,产生比较平滑的控制序列,减少了机械损耗.
无人驾驶汽车;Kalman滤波;预测控制;路径跟踪
0 引言
发达国家从20世纪70年代开始进行智能车辆的开发和试验,我国略晚一些,从20世纪80年代开始进行智能汽车的研究.智能汽车研究的首要目标是辅助驾驶并提高驾驶安全性和舒适性.更长远的目标则是实现高级智能化的无人驾驶.
路径跟踪是无人驾驶汽车的关键技术之一,其主要内容是设计控制器确保汽车沿着预设轨迹行驶,该预设轨迹由车载电脑通过车载传感器、通讯设备等获得的道路信息经过智能计算而得到.控制器的设计与汽车模型有关.由于汽车动力学的非线性特征以及为了准确描述车体状态需要引入多个变量,这使得控制器的设计变得相当复杂.1980年MacAdam[1]提出了线性系统的最优预瞄控制方法,随即将其应用到汽车的路径跟踪任务中.1996年Mechanical Simulation公司在所开发的汽车仿真软件carsim中采用了该算法作为预设的路径跟踪控制算法,获得了非常出色的仿真效果.
本文考虑了无人驾驶汽车路径跟踪试验中产生的测量噪声,使用了一个较为简单的线性模型来描述汽车动力学和运动学过程,设计了能够处理观测噪声的预瞄控制策略,利用carsim软件进行了仿真,并与无Kalman滤波器的控制器进行了对比.仿真结果表明带有Kalman滤波器的最优预测控制器能够达到与普通控制器几乎相同的控制效果,但产生的控制序列要平滑得多.这在真实的汽车驾驶试验中能够节约能源、减少损耗,非常有实用意义.
1 汽车运动预测模型及控制器I设计
汽车动力学模型[2]可以表示如下:
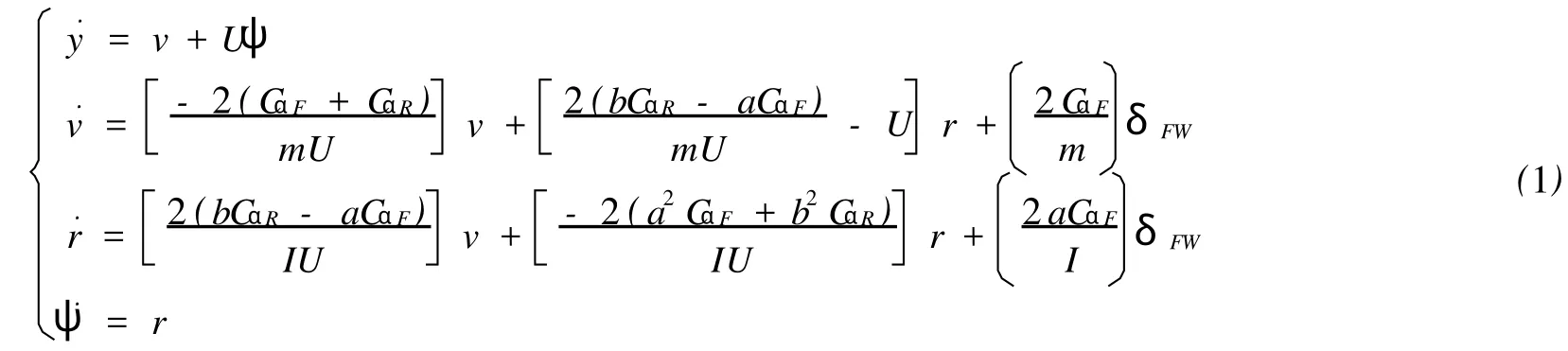
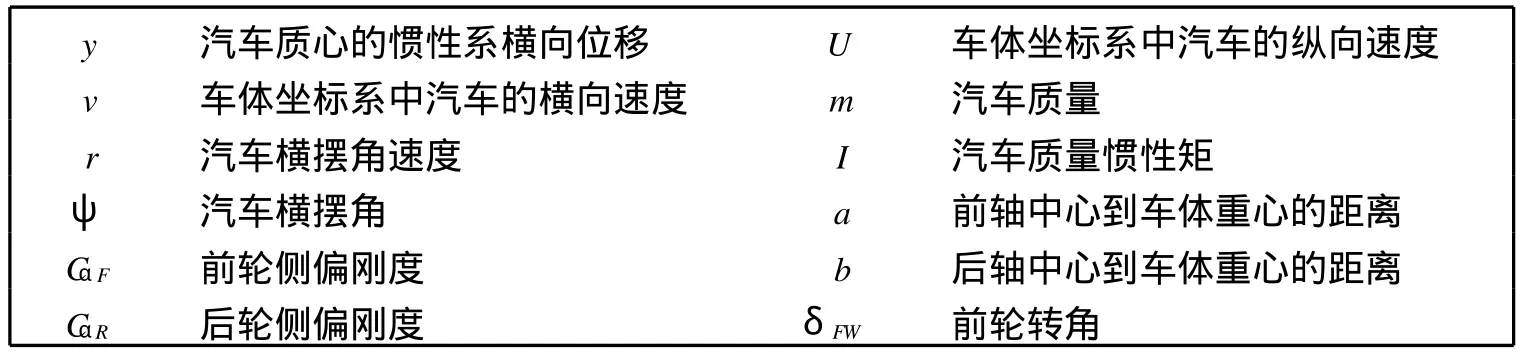
表1 公式(1)中参数Table 1 The parameters of formula(1)
设x=[yvrψ]T,则(1)可以用状态空间表示法重新表示为

且A1=-2(CαF+CαR)/(mU);B1=[2(bCαR-aCαF)/(mU)]-U;C1=2CαF/m
A2=2(bCαR-aCαF)/(IU);B2=-2(a2CαF-b2CαR)/(IU);C2=2aCαF/I
利用上述基本模型,文献[2]给出了路径跟踪的单点预瞄最优控制器设计:


其中,A=eFT,B=∫T0eFtgdt.取 T*=T得控制器I:

2 Kalman滤波器设计
构造如下Kalman滤波器[3]:
预测方程:

更新方程:

其中x=[yvrψ]T为可观测的状态变量,^x(k+1|k)表示k+1时刻状态的预测值,^x(k)表示k时刻状态的估计值.Q,R分别为过程噪声和观测噪声的误差协方差矩阵:Q=0.5×I4,R=10×I4,其它参数设置为:G=I4,H=I4
该滤波算法需要初始化P(0)、x(0):P(0)=04×4、x(0)=04×1,z(k)为观测序列,^x(k)为滤波器输出的状态估计序列.
3 控制器II设计
利用(7)、(8)式输出的状态估计序列^x(k),可以预测k+1时刻状态为^x*(k+1)=2^x(k)-^x(k-1)取y*0(k+1)=(1 0 0 0)^x*(k+1)得到(k+1)T时刻预测状态的横向位移分量.
我们设计的带Kalman滤波的预测最优控制器II为:

4 仿真结果
本节在carsim+simulink仿真环境下设计了两种控制方案用于无人驾驶汽车的路径跟踪控制的仿真试验,在仿真中对观测数据加入噪声,比较了两种控制方案的差异.
试验1:无Kalman滤波器的汽车方向控制试验,仿真试验的Simulink框图如图1所示.
图1 Carsim-simulink联合仿真simulink模型(无Kalman滤波)Fig.1 The co-simulation model of carsim-simulink(without Kalman filter)
试验2:带有Kalman滤波器的汽车方向控制试验,仿真试验的Simulink框图如图2所示.
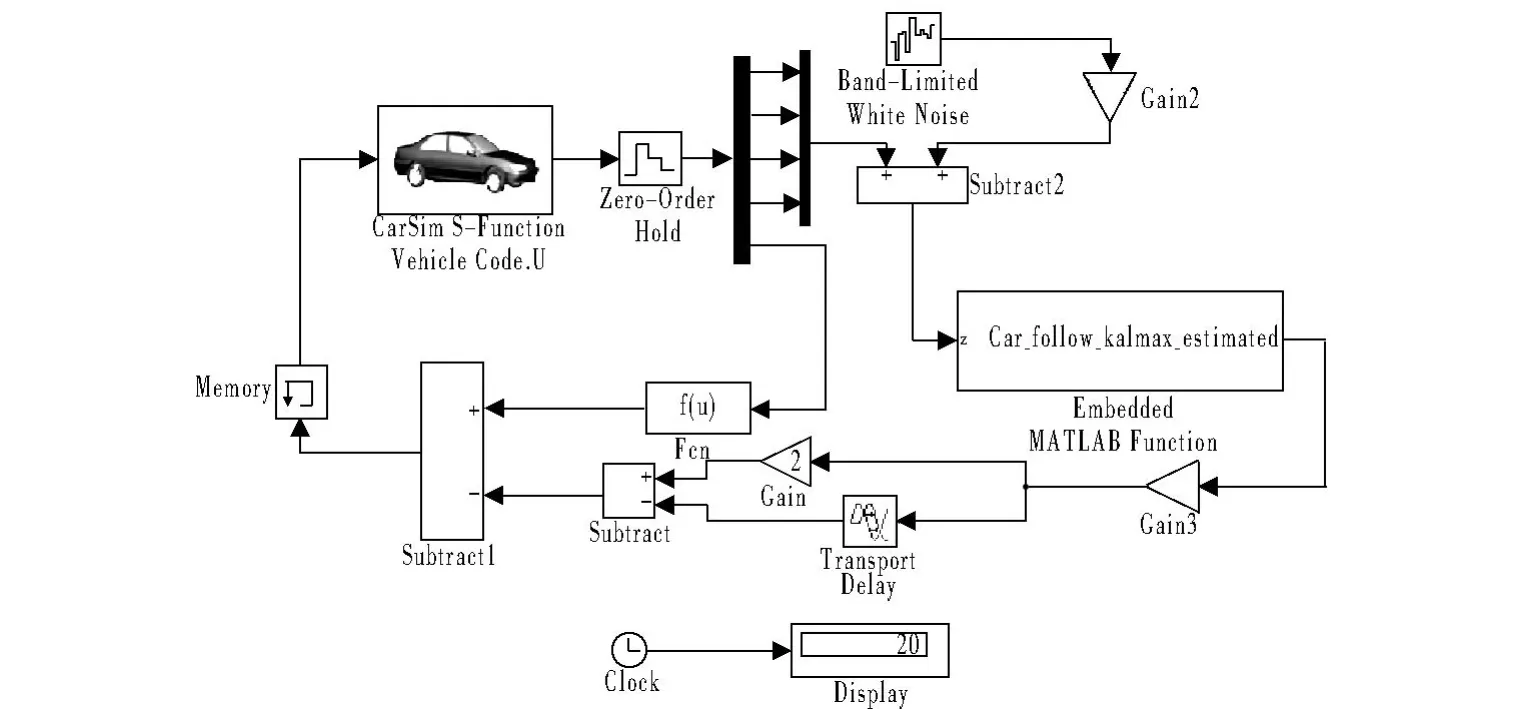
图2 Carsim-simulink联合仿真simulink模型(带有Kalman滤波)Fig.2 Co-simulation model of carsim-simulink(with Kalman filter)
图1 、图2显示了carsim-simulink联合仿真设计结构. CarSim-Function Vehicle Code:i-i是Carsim软件提供的汽车模型部分,其输入是前轮转角,输出依次是汽车的横向位移、横向速度、横摆角、横摆角速度、纵向位移,图2中的Embedded MATLAB Function是Kalman滤波器.
图3(P387)显示了无Kalman滤波的控制器I和有Kalman滤波的控制器II的控制效果,横轴表示时间,纵轴表示横向位移,“——”表示预设轨迹的横向位移,“----”表示控制器1使汽车产生的横向位移,“---”表示控制器2使汽车产生的横向位移,图3显示这两种控制器使汽车产生的横向位移几乎完全重合,说明两种控制器的控制效果差别不大,但是从表示两个控制器产生的控制序列的图4(P387)中我们可以发现,带有Kalman滤波的控制器I产生的控制序列波动幅度明显减小,变化较为平缓,能有效减少能量损耗.
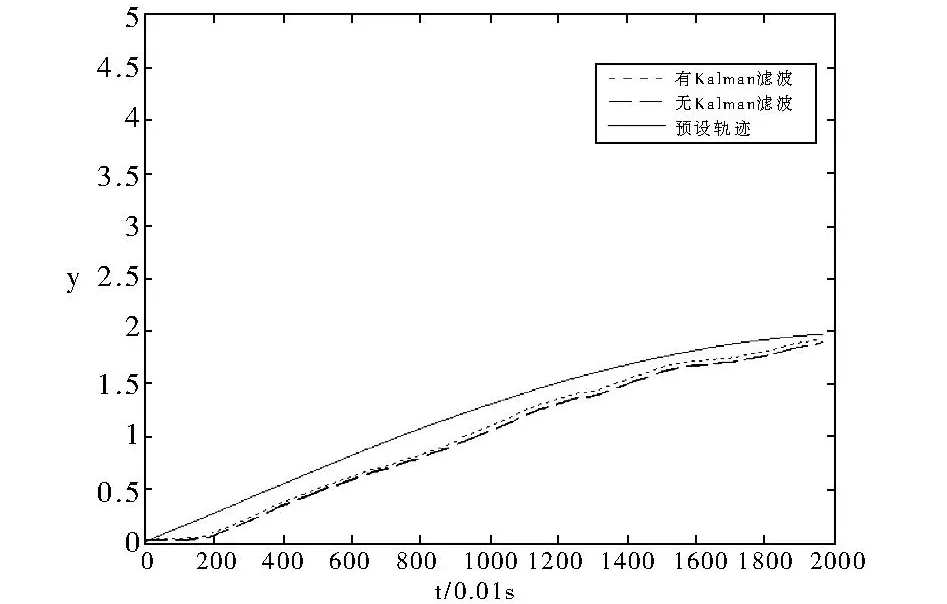
图3 两种控制器使汽车产生的横向位移Fig.3 Lateral displacement caused by the two controllers
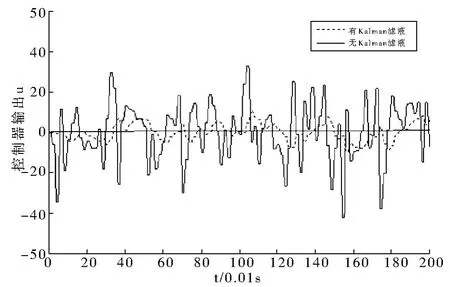
图4 两种控制器产生的控制序列Fig.4 Control series caused by the two controllers
5 结论
本文考虑了智能车数据采集过程中遇到的观测噪声问题,通过设计一个简单的Kalman滤波器建立了改进的最优预瞄控制系统,减少了无人驾驶汽车的路径跟踪控制过程中的能量损耗,改善了控制性能.
[1] MACADAM C C.An optimal preview control for linear systems[J].Dynamic S ystems,Measurement,Control,1980,102: 188-190.
[2] MACADAN C C.Application of an Optimal Preview Control for Simulation of Closed-Loop.Automobile Driving[J]. I EEE Trans S yst,Man,Cybern,1981,2:393-399.
[3] WELCH GREG,BISHOP GARY.An Introduction to the Kalman Filter,http://www.cs.unc.edu/~tracjer/media/pdf/ Siggraph2001_ciyrse Pack-08.pdf.
[4] BATISTA PEDRO,SU KVESTRE CARLOS.Optimal Position and Velocity Navigation Filters for Autonomous Vehicles [J].A utomatica,2010,46:767-774.
Path Tracking Control for Autonomous Vehicle with Measurement Noise
LI Lei,J IA Xin-chun,J IA Zhu-rong,CHENG Ting-ting
(School of Mathematical Sciences,Shanxi University,Taiyuan030006,China)
An optimal preview control structure with Kalman filtering was introduced to the path tracking control for autonomous vehicle.Road environment information and vehicle’s states are obtained usually by utilizing GPRS,radar,camera,gyroscope and so on.This process,however,usually appears noise.Compared to the optimal predictive controller without Kalman filtering,the more smooth control sequence can be generated by the optimal preview controller with Kalman filtering,as well as reducing mechanical loss.
autonomous vehicle;Kalman filtering;preview control;path tracking
TP242.6
A
0253-2395(2010)03-0384-04
2010-04-08;
2010-04-21
国家自然科学基金(90820014)
李 雷(1980-),男,山西忻州人,硕士,研究领域:汽车控制、模糊控制.E-mail:lilei@sxu.edu.cn
猜你喜欢
作文小学中年级(2022年9期)2022-09-08
科学(2020年3期)2020-11-26
小哥白尼(军事科学)(2020年8期)2020-05-22
电子制作(2019年11期)2019-07-04
电子制作(2018年16期)2018-09-26
系统工程与电子技术(2016年7期)2016-08-21
火控雷达技术(2016年2期)2016-02-06
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
电子设计工程(2014年20期)2014-02-27