基于虚拟样机的可重构模块化机器人动力学分析*
2010-11-28 04:59张艳丽车金峰李树军
制造技术与机床 2010年5期
张艳丽 车金峰 李树军③
(①沈阳航空工业学院机电工程学院,辽宁沈阳 110136;②东北大学机械工程与自动化学院,辽宁沈阳 110004;③机器人学国家重点实验室,辽宁沈阳 110004)
可重构模块化机器人的动力学系统是一个相对比较复杂的系统,其特点是存在着较为复杂的非线性关系。目前,对于机器人动力学的研究主要采用两种方法,即拉格朗日方法[1]和牛顿-欧拉方法[2]。拉格朗日方法的特点是不仅能用最简单的形式求得非常复杂的系统动力学方程,而且还能获得显式结构;牛顿-欧拉方法是基于运动坐标系和达朗贝尔原理建立系统动力学方程的,它没有多余的信息,而且计算速度快。本文采用牛顿-欧拉方法,可以使可重构模块化机器人的关节模块受到的力(矩)计算更快更有效,同时借助于MATLAB和ADAMS[3]对可重构模块化机器人工作时的动力学特性进行仿真分析[4-5]。
1 工作任务
要求可重构模块化机器人在末端执行器没有负载的条件下,实现以X0=400 mm,Y0=250 mm,Z0=650 mm,为圆心,在X0=400 mm,的平面内以100 mm为半径的圆形轨迹运动,并且要求末端执行器的夹持器保持水平,即末端姿态矩阵R始终为:
2 构型选择
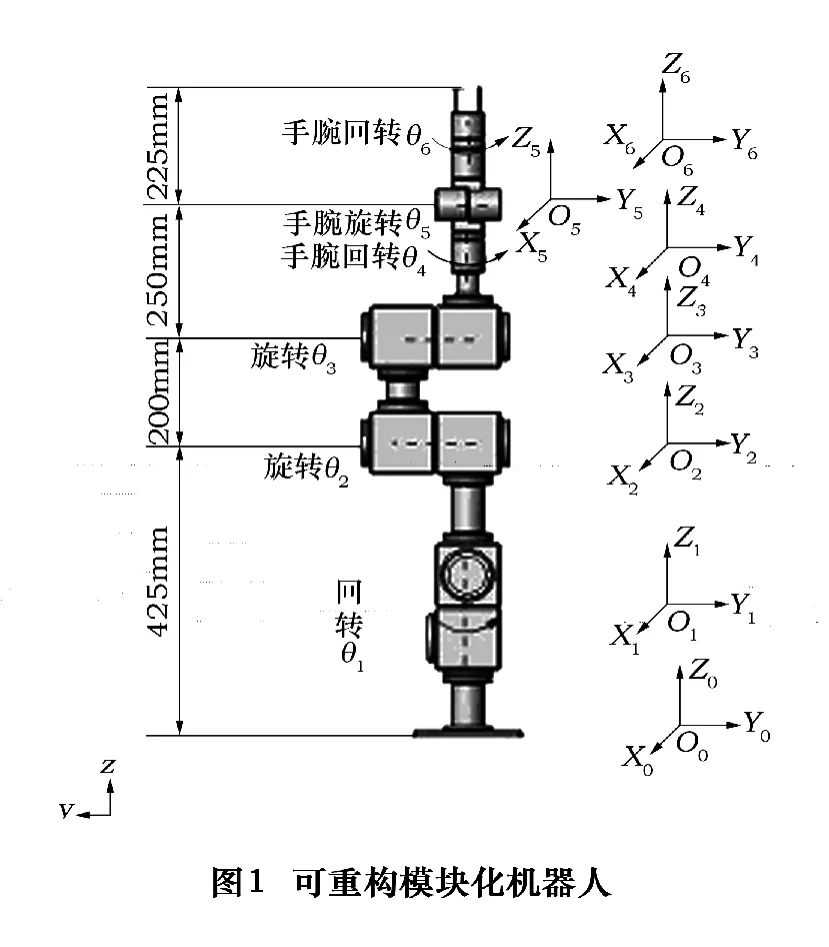
根据工作任务要求(如图1),在ADAMS环境下建立了一个六自由度可重构模块化机器人的虚拟样机模型,以对其动力学进行仿真分析[6]。其中,每一个模块输出的最大力矩都是Tmax=30 N·m,手腕每一个关节模块输出的最大力矩为Tmax=8 N·m,机器人各个模块的参数见表1。
3 轨迹规划和变量求解
3.1 轨迹规划
可重构模块化机器人从初始状态(各个关节模块的变量qi=0,i=1,2,…,6)到完成以X0=400 mm,Y0=250 mm,Z0=650 mm为圆心,在X0=400 mm的平面内以100 mm为半径的圆形轨迹运动过程可分为两个阶段:第一阶段是机器人各个关节从初始状态(即各个关节模块的变量为零)到机器人末端执行器的夹持器到达工作任务圆上;第二阶段是机器人各个关节从工作圆上的第一点开始到绕圆心一周工作任务结束。
首先选择X0=400 mm,Y0=250 mm,Z0=650 mm为进入工作空间的第一点,同时必须满足当进入第一点时末端执行器的夹持器保持水平。根据末端执行器的位姿矩阵
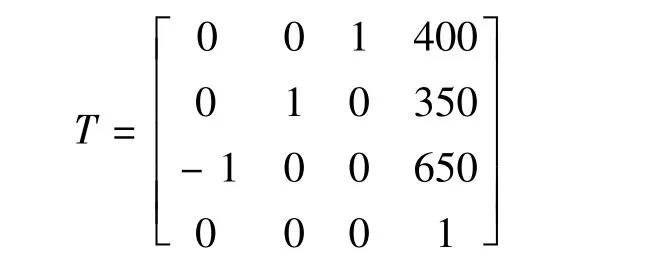
求解各个关节变量为:q=[40.6013°2.3059°-109.7247°70.7484°43.5778°-64.2615°],那么就可以确定轨迹规划的第一个阶段:第六个关节模块按照一定的步长(0.05 rad/s)达到关节变量值q6=-64.2615°,再由第五个关节模块按照相同的步长达到关节变量值q5=43.5778°,就这样依次下去,直到第一个关节模块最后完成转动,这样设计的轨迹保证了在进入工作圆第一点时末端执行器的夹持器姿态始终保持水平。
其次,第二个阶段轨迹规划就是末端执行器的夹持器保持水平的同时在平面内做工作圆形,为了便于编程所规划的轨迹转化为参数方程,该工作圆的参数方程为:

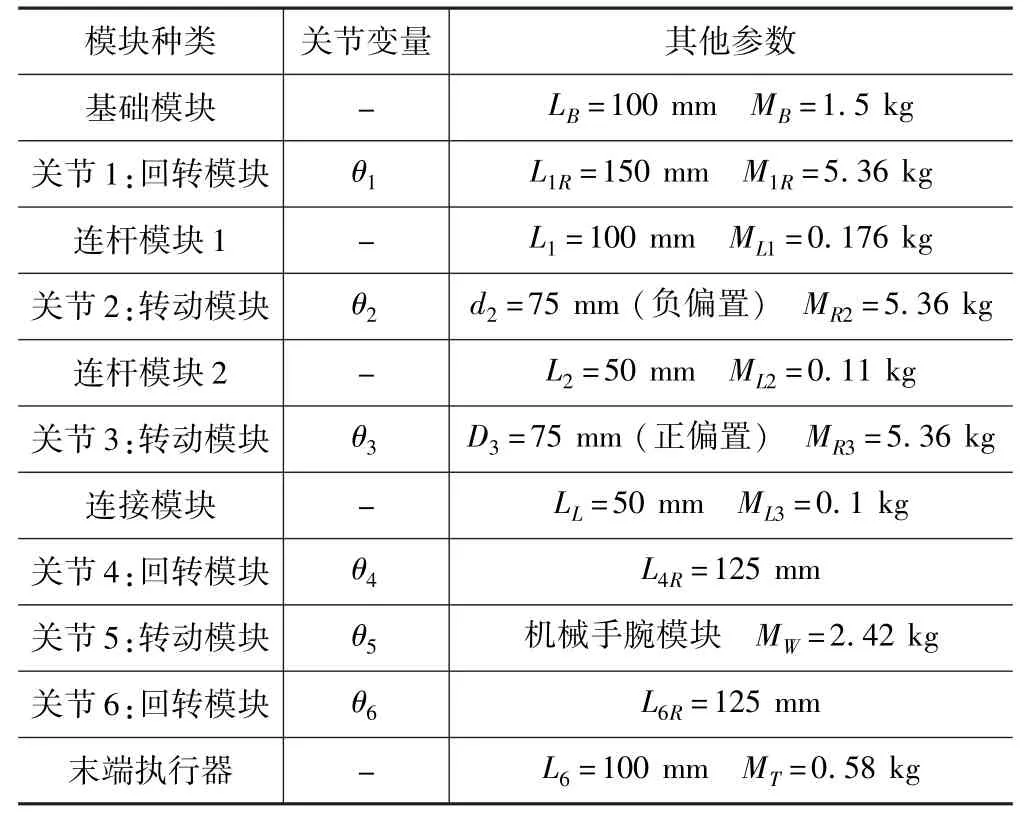
表1 六自由度可重构模块化机器人参数
3.2 变量求解
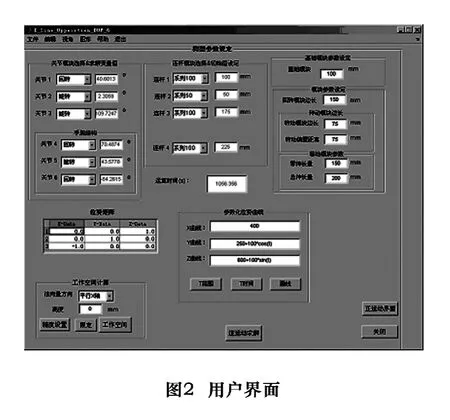
确定了可重构模块化机器人工作轨迹后,接下来确定各个关节模块转角按照所规划的轨迹一系列有序的变量值。轨迹规划设计为两个阶段,所以变量求解时也要按照两个阶段设计,但是整个时间与各个关节模块变量又是关联的。第一个阶段就是六个关节模块按照顺序转动到末端执行器的夹持器与工作圆进行衔接。因为每一个关节转角步长为0.05 rad/s,所以第一个阶段的总共时间为每一个关节模块转动时间的总和11.6 s。第二个阶段利用MATLAB软件设计一个用户界面(图2),选择可重构模块化机器人的模块,输入相应的参数以及关于t参数方程(设定t的步长为0.021 rad/s),按逆运动学求解按钮,程序将自动完成对夹持器保持水平和位置向量参数方程的求解,得到关于时间范围为11.7 s≤T≤41.6 s的各个关节的一系列的变量值,将其输出为可以与ADAMS软件联合使用的中间文件。该文件的作用是在11.7 s≤T≤41.6 s的范围内,每隔0.1 s对机器人各个关节模块(即关节模块的伺服电动机)进行实时控制,将两个阶段的关节变量值的程序进行连接生成一个文件,使两个时间的关节变量在总体上是相对连续的。
4 动力学分析与仿真
基于虚拟样机模型,将各个关节模块变量实时控制参数生成的文件导入ADAMS软件中,并设定仿真的结束时间为41.6 s,对关节模块的伺服电动机进行实时控制的步长为0.1 rad/s,即可对可重构模块化机器人进行两个阶段的总体仿真。需要说明的是,本文对机器人动力学的仿真分析都是在不考虑各个关节模块的粘性摩擦和库伦摩擦的条件下进行的。各个关节的角速度和输出力矩如图3和4所示。
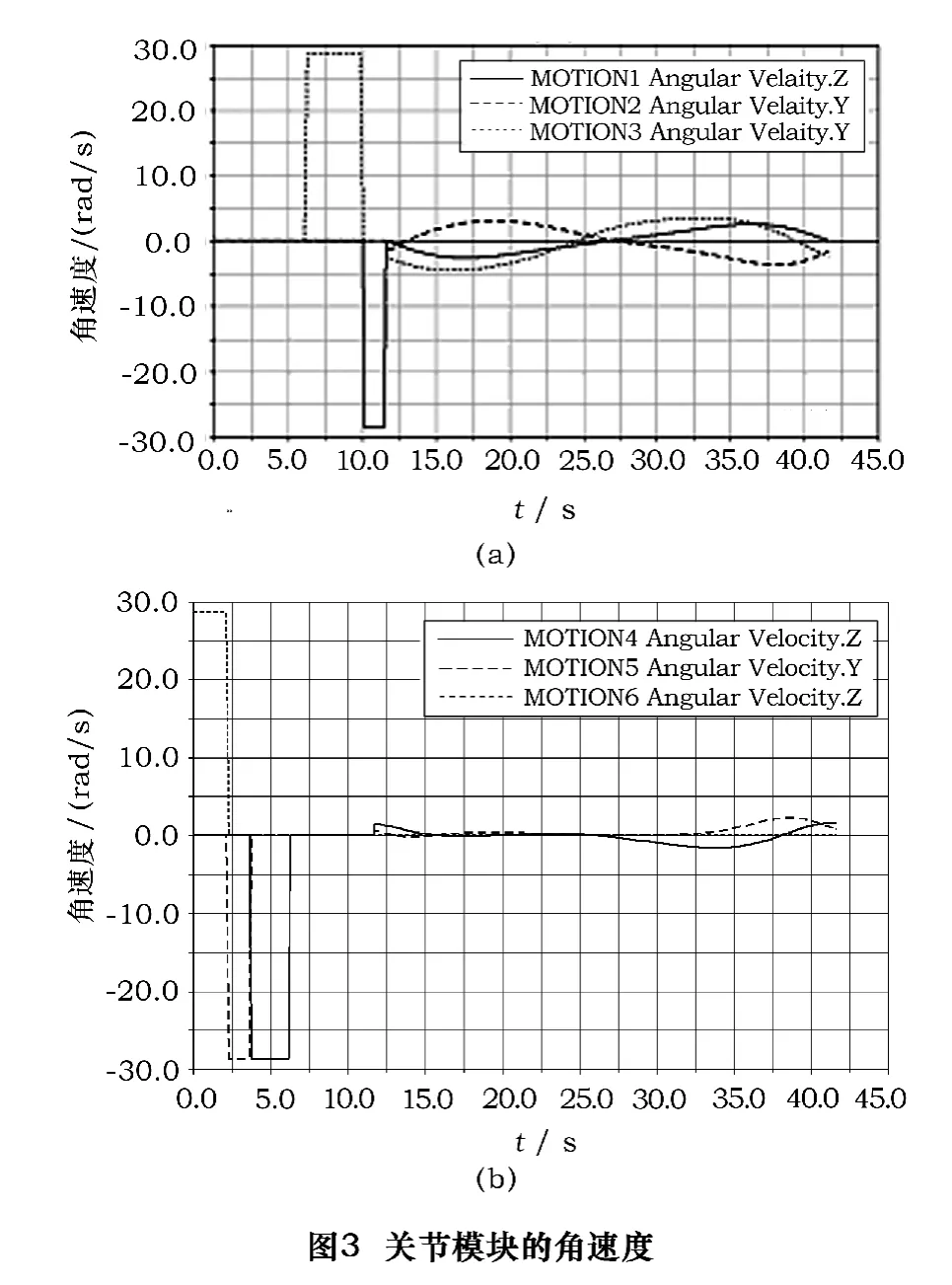
通过图3可看出第一阶段结束后是使执行器达到工作任务的第一点,所以在这个阶段中每一个关节的速度都比较快;第二阶段是进行所要求的工作任务,为了能减小误差而较好地逼近工作圆轨迹,关节的速度相对较小,在这个阶段各个关节的角速度都比较平缓且没有较大的波动。关节模块力矩每一时刻的值可认为是伺服电动机每一个时刻应当输出的力矩值。从图4可看出,为了使从静止到运动所输出的角速度能尽快地达到所要求的角速度值,伺服电动机在刚驱动时输出的力矩都相对较大。第一阶段各个关节模块的运动是依次进行的,每一个关节都是由静止到运动,在力矩曲线上都会出现突然增大的时刻;第二阶段输出的力矩相对比较平缓没有突然增大,所以能够在执行工作任务时比较稳定,而且在工作时满足一般的伺服电动机输出力矩小于等于额定输出力矩的要求。

5 结语
根据给定任务选择可重构模块化机器人的构型,基于虚拟样机模型并应用MATLAB和ADAMS软件进行了动力学仿真分析,利用分析得到的结果可使用户比较直观地分析可重构模块化机器人在工作状态下各个阶段的情况,从而为构型的选择提供了依据,并且便于进行构型设计、校验以及控制系统的分析和综合。
[1]史孝文,杨晓京.基于MATLAB/Simulink的平面连杆机器人的动力学分析与动态仿真[J].机械,2004,31(12):41-43.
[2]翟雪琴,朱玉蓉,郝矿荣.6R机器人动力学仿真在MATLAB环境下的实现[J].轻工机械,2005(4):48-51.
[3]李军,邢俊文,覃文浩.ADAMS实例教程[M].北京:北京理工大学出版社,2002.
[4]Dollar bide Robert L,Age Arvin.Simulation and Control of Distributed Robot Search Teams[J].Computers and Electrical Engineering,2003,29(5):625-642.
[5]Han Jeongheon,Chung W K,Youm Y and Kim S H.Task Based Design of Modular Robot Manipulator Using Efficient Algorithm[J].Proceedings of IEEE International Conference on Robotics and Automation,1997(4):507-512.
[6]车金峰.面向用户的可重构模块化机器人分析与仿真研究[D]:[硕士学位论文].沈阳:东北大学,2009:16-35.
猜你喜欢
中国特种设备安全(2022年2期)2022-07-08
海洋信息技术与应用(2022年1期)2022-06-05
现代装饰(2020年5期)2020-05-30
汽车与新动力(2019年5期)2019-11-07
制造技术与机床(2019年8期)2019-09-03
制造技术与机床(2017年9期)2017-11-27
中国核电(2017年2期)2017-08-11
山东青年(2016年12期)2017-03-02
航天制造技术(2016年6期)2016-05-09
自动化学报(2016年8期)2016-04-16