分布式干扰下雷达网的目标跟踪技术
2011-02-22 07:29徐海全王国宏关成斌
兵工学报 2011年6期
徐海全,王国宏,关成斌
(海军航空工程学院 信息融合技术研究所,山东 烟台264001)
0 引言
分布式干扰具有覆盖范围广、设备简单、生存能力强,空域、频域、时域互补等优势,一些常规的抗干扰措施对抗分布式干扰效果不明显。现有文献对分布式干扰报导较少,主要着重于分布式干扰机的部署和此类干扰的干扰性能研究[1-6],文献[7]研究了如何对干扰源进行跟踪,而在分布式干扰下如何对目标进行跟踪,据本文作者了解尚未见到相关文献,且分布式干扰欲掩护的目标其危胁性较高,因此研究分布式干扰下目标跟踪具有十分重要的理论价值与实际应用意义。
分布式干扰区域内,雷达检测概率下降甚至发现不了目标,目标的航迹寿命短,融合中心航迹关联的数据量激增。同时在分布式干扰下,为防止接收机饱和,恒虚警措施必然会提高检测门限,从而淹没许多目标,所以在干扰下面临一个矛盾,为了发现更多目标必须降低检测门限,而降低检测门限则面临虚警高的问题。而多假设跟踪算法(MHT)具有延迟决策,通过延迟决策,达到了信息量的积累,在理想假设条件下,MHT 被认为是处理数据互联的最优方法[8],其互联不仅取决于当前量测而且取决于历史量测,比较适用于信噪比较低的系统,所以将MHT 算法引入分布式干扰下雷达网的目标跟踪具有一定的可行性。同时大量的MHT 文献[8-12]为将MHT 引入到分布式干扰下目标跟踪奠定了理论基础。
文中研究了分布式干扰的鉴别方法,通过构造检测概率改善因子,建立了检测门限选取准则,提出了分布式干扰下雷达网多假设跟踪方法。最后给出了仿真分析与结论。
1 问题描述和总体思路
分布式干扰下,雷达对某目标的探测是不连续的,但并不是每个雷达每个时刻都发现不了此目标。当某个雷达不能检测跟踪此目标时,其他雷达有可能发现此目标,这时可以利用其他雷达的量测来进行航迹更新,即利用了雷达网有效探测区域互相弥补的优势。因此可以通过数据压缩将分布式雷达数据处理转换成集中式雷达数据处理。利用MHT 的延迟决策,构造检测概率改善因子提高目标检测概率,在多假设跟踪中利用航迹后验概率删除虚假航迹。分布式干扰下雷达网跟踪算法流程如图1所示。
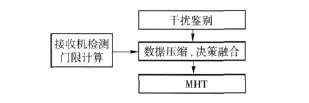
图1 雷达网多假设跟踪算法流程Fig.1 Radar network MHT algorithm flow
首先利用基于空间距离差的鉴别方法对干扰进行鉴别,鉴别为分布式干扰后,再对干扰功率进行估计,通过构造检测概率改善因子,对检测门限进行自适应选取,提高了目标的检测概率。利用χ2检验得到不同雷达对于同一目标的量测,将这些量测进行数据压缩,得到等效量测,将等效量测与其他量测一起进行多假设跟踪处理。
2 算法原理
2.1 基于空间距离差的分布式干扰鉴别
以两坐标雷达为例,如图2所示,左图是集中式干扰,右图是分布式干扰,R1、R2、R3分别表示3 部雷达,J 为集中式大功率干扰机,可同时干扰R1、R2、R3三部雷达,J1、J2、J3为3 部分布式干扰机,由于其功率较小,只能干扰与之较近的雷达,对其他雷达干扰较小。设每部雷达的干扰源方位角为^θi,i,j=1,2,3,以该雷达为顶点,沿此角度做一直线,两两交点为oij,则交点坐标(xij,yij)
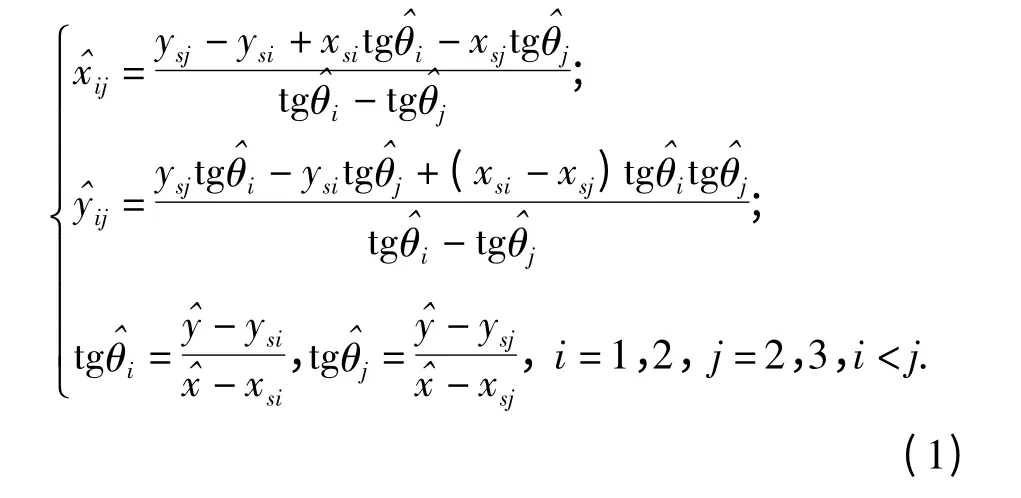
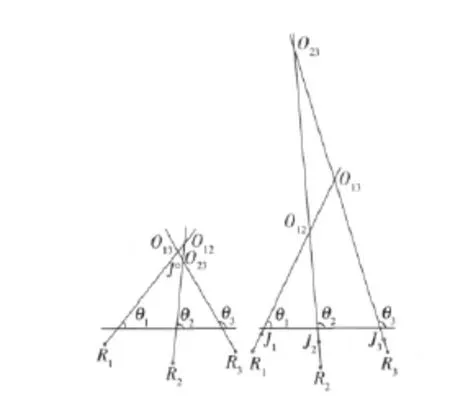
图2 干扰判别示意图Fig.2 The diagram of jamming discrimination
定位点的互协方差如下所示
定位点(xij,yij),(xil,yil)间的距离差为

进而可求得距离差(Δx,Δy)的均值和方差分别为
式中,ρ 为距离差Δx 和Δy 的相关系数。
构造如下的检验统计量

其近似服从自由度为2 的χ2分布。所有交叉点构成的检验统计量

服从自由度为6 的χ2分布,其判别规则如下

G 为χ2检验中对应于给定显著性水平α 的门限值。1 表示接受假设,此干扰为集中式干扰,0 表示拒绝,此干扰为分布式干扰。
2.2 检测门限的自适应选取
在k 时刻,当干扰能量级为γ0(k)时,第l 个单元的虚警率和归一化检测门限[13]为
Σl(k)为第l 个单元接收信号的归一化天线增益,为未受干扰时设定的虚警概率期望值。
设改善因子ε,则检测门限和检测概率变为
2.3 基于数据压缩的多假设跟踪
1)数据压缩
设Zil(k)表示直角坐标系下k 时刻来自雷达i的第l 个测量,转换到极坐标下,则此目标的斜距、方位测量值:距离、方位精度为σri,σθi,目标t 的真实距离、方位为(rt(k),θt(k)),如果第i 个雷达的第l 个测量目标测量值源于第t 个目标,则

按照距离的大小依次排列,则同一目标在不同雷达上形成的距离差与方位差服从如下的分布
mk为第k 时刻的量测个数。根据式(10),可以构造服从自由度为2 的χ2检验统计量
其单边拒绝域为V={Tij>χ2α(2)},α 为显著性水平,通过检验可以判断两个量测是否为同一目标。假设有N 个雷达发现此目标,将其转换成直角坐标,得到Zt1(k),Zt2(k),…,ZtN(k)采用如下的公式进行数据压缩,得到k 时刻下第t 个目标的等效量测值:

将源于同一目标的量测利用等效量测代替,假设有nk个等效量测,将在融合中心产生的等效量测看成是第Ns+1 个雷达(雷达网有Ns个雷达)的量测,以及各雷达不符合χ2检验的量测。则k 时刻融合中心所获得的综合观测向量为:
利用秩K 融合规则[14]求出融合中心对此目标的检测概率,作为此等效量测的检测概率。
2)航迹得分
利用递推关系可以计算航迹Ti得分Li,具体可以参考文献[10].随着干扰能量增大,改善因子ε 也应相应地增大,从而可以保证目标的检测概率不会下降过快,但同时这也增加了观测区域的虚警率,因此在MHT 算法里设置不同的航迹后验概率门限,对航迹进行删除,对于包含较大改善因子ε 量测组成的航迹采用较大的门限。MHT 算法详细流程和公式如文献[8-12]所示,文中不再进行论述。
3 仿真验证
3.1 仿真1 集中式与分布式干扰鉴别
1)仿真条件
雷达与干扰机的相对位置如表1所示,利用文中提出的基于空间距离差的方法进行鉴别。

表1 雷达、干扰机的相对位置Tab.1 The relative position of radar network and jammers
2)仿真结果与分析
表2给出了集中式干扰与分布式干扰鉴别仿真结果(蒙特卡罗仿真次数M=1 000).集中式干扰鉴别概率与分布式干扰鉴别概率分别定义为

从表2可知,集中式干扰的正确鉴别概率比分布式干扰鉴别概率要小,分布式干扰鉴别率都保持在100%.这是因为分布式干扰机之间的间隔相比于集中式干扰由于雷达测角误差造成的距离差要大得多,所以分布式干扰鉴别概率要高于集中式干扰鉴别概率。
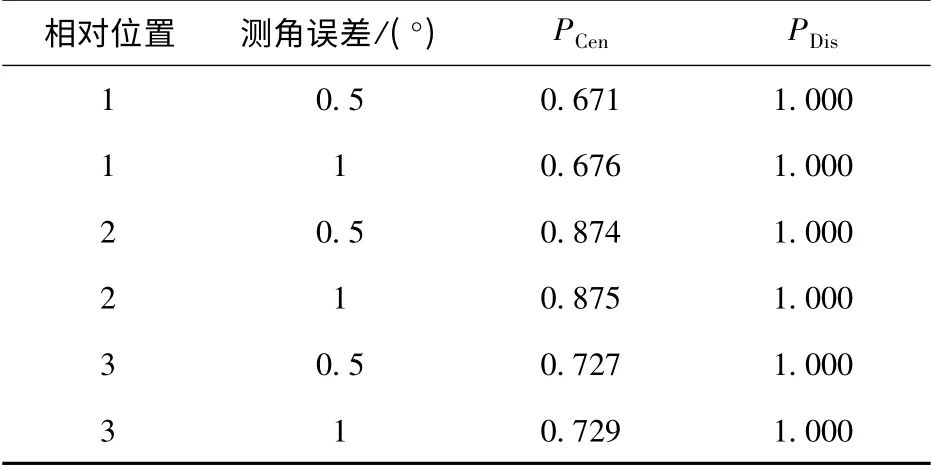
表2 干扰的鉴别概率Tab.2 The probability of jamming discrimination
3.2 仿真2 算法跟踪性能分析
1)仿真条件
雷达参数:数量:3 个,位置(km):(-50,0),(0,0),(0,50),最大作用距离RM=150 km,工作波长λ=0.1 m,天线增益GT≈GR=35 dB,副瓣增益(GR)SLL=-5 dB,带宽BR=4 MHz,三雷达均为两维雷达,测距误差σR1,σR2,σR3均为100 m,测角误差σθ1,σθ2,σθ3均为0.2°.
干扰机参数:数量:5 个,位置(km):(- 30,20),(-15,20),(0,20),(15,20),(30,20),天线增益GJ=22 dB,设天线口径为圆形,相当于波束度为ΔθJ=13°,副瓣增益(GJ)SLL=-5 dB,干扰功率PJ=10 W,带宽BJ=10 MHz,干扰机自身损耗LJ=2 dB.
目标参数:假设跟踪2 个匀速直线运动目标,RCS=10 m2,目标的运动参数见表3.当改善因子ε >10 时,MHT 的航迹后验概率门限设为0.01,其他情况则设为0.000 5.杂波采用非参数泊松分布模型,波门内虚假量测的期望数m=1.8,虚警为10-4.
2)仿真结果与分析
图3是雷达的威力图与目标的真实轨迹。图4是不同改善因子ε 时目标的检测概率与虚警强度。图5是目标的真实运动轨迹以及跟踪航迹。图6是两目标的跟踪位置均方根误差。表4给出了利用常规分布式雷达网目标跟踪方法与本文方法时的目标跟踪性能。

表3 目标真实运动参数Tab.3 The parameter of target movement
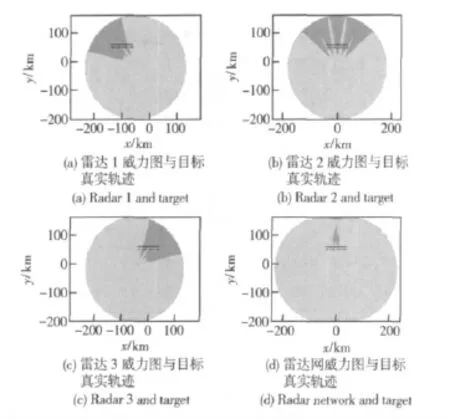
图3 雷达的威力图与目标的运动轨迹Fig.3 The radar coverage diagram and target movement trajectory
从图4的γ=1 图,可以看出随着改善因子ε 增加,检测概率是增加的,甚至当改善因子选择较大时如80,检测概率可以和未受干扰时相近。当80 >ε >30 时,检测概率改善效果不明显,同时从第4 个小图可以看出虚警强度是随着改善因子ε 成线性增加的,因此可以设改善因子为30.
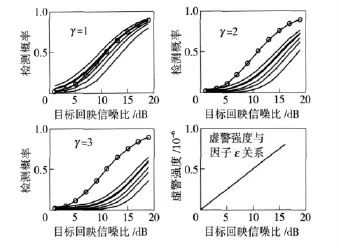
图4 不同干扰能量级别下目标检测概率以及虚警强度与改善因子ε 关系Fig.4 The probability of detection on the different jammer power levels and the relation between the false alarm probability and improvement factor ε
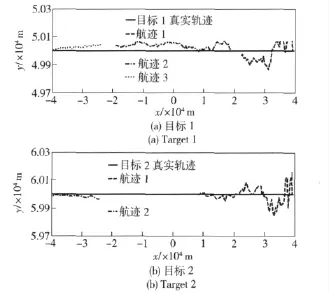
图5 目标真实运动轨迹与跟踪航迹Fig.5 Target true trajectory and estimated trajectory
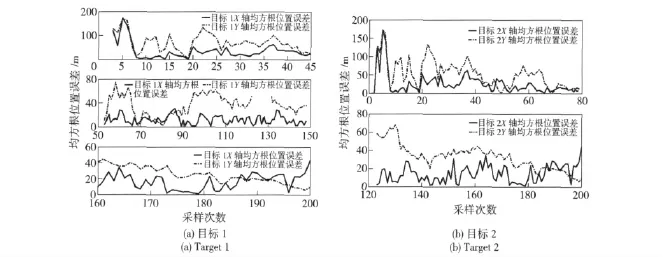
图6 目标1、2 的跟踪均方根位置误差Fig.6 Root-mean-squared error of the first target and the second target
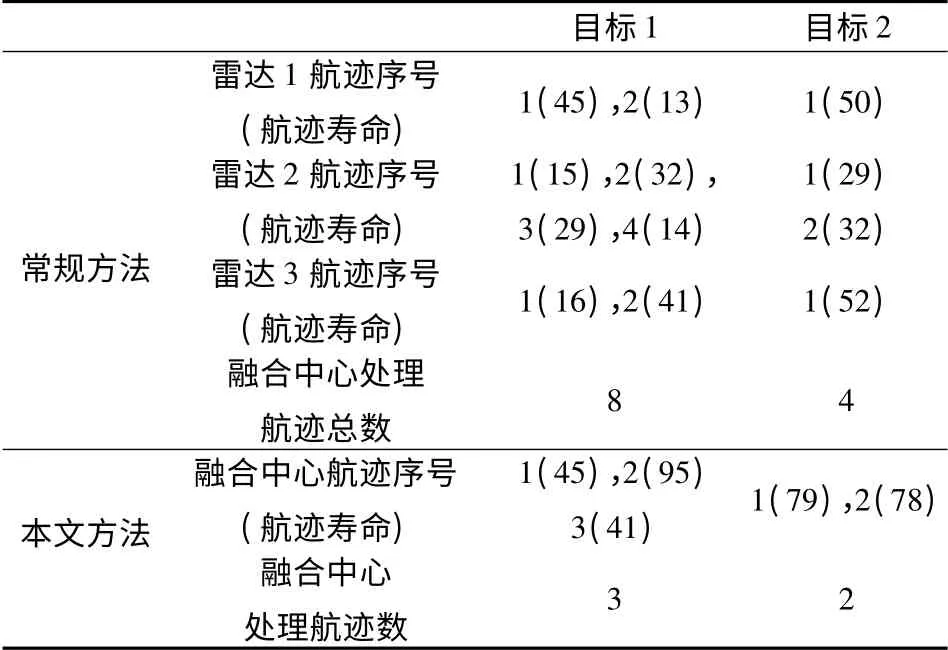
表4 两种方法下目标的航迹数与航迹寿命Tab.4 The trajectory number and track lifetime by two methods
从图5和表4可知,采用分布式雷达数据处理方法时,由于雷达受到干扰,产生了许多盲区,一个目标先后形成了多条航迹,干扰越严重的雷达,产生的航迹数越多,融合中心需要处理的航迹数将会成倍的增加。雷达2 是本仿真中受干扰最严重的,目标1 在雷达2 中先后形成了4 条航迹,融合中心需要处理的航迹总数达到了12 条,未受干扰时只需要处理6 条,而利用本文的方法在融合中心形成总的航迹数为5 条,融合中心处理的航迹数大大减少,并且航迹寿命都有了较大的提高。且通过图6可以看出本文的方法对目标的跟踪精度是较高的。
通过以上分析可知,采用基于MHT 的雷达网跟踪方法能够在分布式干扰下较大的提高航迹寿命,减少由于单个雷达检测概率下降、目标丢失造成的航迹不连续的问题。
4 结论
针对分布式干扰下雷达对目标的跟踪难点,提出了分布式干扰条件下雷达网的多假设跟踪方法,研究了分布式干扰与集中式干扰的鉴别,目标检测概率改善因子的选取,基于数据压缩的MHT 方法,并进行了相应的仿真。仿真结果表明本方法有效地解决了分布式干扰造成的航迹寿命短,融合中心航迹数量急剧增加的问题,最大可能的提升了航迹寿命,较好的实现了雷达网在分布式干扰下对目标的跟踪,在工程应用中具有较高的理论参考意义和实用价值。当然文中对某些假设条件进行了简化,还需要进一步研究。
References)
[1] Butler,Amy.Wolves in the battle[J].Aviation Week and Space Technology,2005,162(24).
[2] Fnlghum,David,A.Wolfs and packs[J].Aviation Week and Space Technology,2007,166(4).
[3] 王国宏,王捷,倪保航.“狼群”干扰对单、双基地雷达的干扰分析[J].海军航空工程学院学报,2005,20(3):311-314.WANG Guo-hong,WANG Jie,NI Bao-hang.Effects analysis of wolfpack jamming on monostatic radar and bistatic radar[J].Journal of Naval Aeronautical Engineering Institute,2005,20(3):311-314.(in Chinese)
[4] 王勇刚,李修和,沈阳.分布式压制性干扰下的双基地雷达探测能力研究[J].电子信息对抗技术,2007,22(4):45-49.WANG Yong-gang,LI Xiu-he,SHENG Yang.Detecting capability of bistatic radar under blanket jamming[J].Electronic Warfare Technology,2007,22(4):45-49.(in Chinese)
[5] 张顺健,胡振彪,陈永光.分布式干扰机干扰预警雷达网的暴露区算法[J].电子信息对抗技术,2003,18(3):8-10.ZHANG Shun-jian,HU Zhen-biao,CHEN Yong-guang.The calculating method of radar net’s detection area on the condition of distributed jammers[J].Electronic Warfare Technology,2003,18(3):8-10.(in Chinese)
[6] 蔡小勇,蒋兴舟,贾兴江,等.分布式电子干扰系统干扰效能分析与仿真[J].海军工程大学学报,2006,18(3):47-51.CAI Xiao-yong,JIANG Xing-zhou,JIA Xing-jiang,et al.Analysis and simulation for efficiency of distributing electronic jamming system[J].Journal of Naval University of Engineering,2006,18(3):47-51.(in Chinese)
[7] 宋小全,孙仲康.组网雷达在干扰条件下的跟踪[J].现代雷达,1997,19(2):12-20.SONG Xiao-quan,SUN Zhong-kang.Radar network target tracking in jamming environment[J].Modern Radar,1997,19(2):12-20.(in Chinese)
[8] 何佳洲,吴传利,周志华,等.多假设跟踪技术综述[J].火力与指挥控制,2004,29(6):561-565.HE Jia-zhou,WU Chuan-li,ZHOU Zhi-hua,et al.Survey of Multiple Hypothesis Tracking[J].Fire Control & Command Control,2004,29(6):561-565.(in Chinese)
[9] 张晶炜,熊伟,何友.基于数据压缩的集中式多传感器多假设算法[J].北京航空航天大学学报,2007,33(12):1448-1451.ZHANG Jing-wei,XIONG Wei,HE You.Multisensor multipled hypothesis algorithm based on data compressing technic[J].Journal of BeiJing University of Aeronautics and Astronautics,2007,33(12):1448-1451.(in Chinese)
[10] Blackman S S.Design and analysis of modern tracking systems[M].Boston:Artech House,1999:1070-1076.
[11] Blackman S S.Multiple hypothesis tracking for multiple target tracking[J].IEEE A&E Magazine,2004,19(1):5-17.
[12] Masamichi Kojima.A study of target tracking using track-oriented multiple hypothesis tracking[J].SICE,1998,5:29-31.
[13] Kirubarajan T,Bar-Shalom Y,Blair W D,et al.IMMPDAF for radar management and tracking benchmark with ECM[J].IEEE Transaction on Aerospace and Electronic Systems,1998,34(4):1115-1132.
[14] 王国玉,汪连栋.雷达电子战系统数学仿真与评估[M].北京:国防工业出版社,2004:194-207,267-278.WANG Guo-yu,WANG Lian-dong.Simulation and evaluation of radar electronic warefare systems[M].Beijing:Publishing House of National Defense Industry,2004:194-207,267-278.(in Chinese)
猜你喜欢
汽车实用技术(2022年4期)2022-03-07
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
数字通信世界(2020年2期)2020-03-04
铁道通信信号(2020年7期)2020-02-06
青年歌声(2019年12期)2019-12-17
火力与指挥控制(2019年4期)2019-06-14
能源(2018年8期)2018-09-21
北京航空航天大学学报(2017年7期)2017-11-24
汽车零部件(2017年4期)2017-07-12
北京航空航天大学学报(2016年6期)2016-11-16