基于稀疏信号表示的SAR 地面运动目标成像
2011-02-22 07:29钱江吕孝雷李凉海邢孟道
兵工学报 2011年6期
钱江,吕孝雷,李凉海,邢孟道
(1.西安电子科技大学 雷达信号处理重点实验室,陕西 西安710071;2.中国航天科技集团704 所,北京100076)
0 引言
随着合成孔径雷达(SAR)的广泛应用,SAR 地面运动目标检测(GMTI)在战场侦察、舰船检测和交通管理等领域的应用前景越来越明显。SAR-GMTI通常对前后通道录取的数据进行二维匹配滤波得到SAR 图像,接着补偿前后通道的包络和相位差异后对消并进行检测,最后完成测速定位。进行方位匹配滤波时假定运动目标引起的距离走动率很小,目标与杂波的调频率差异很小,所以适合检测低速地面运动目标。在SAR 图像中快速目标径向速度会引起距离走动,径向加速度和沿航向速度则导致方位调频率偏离杂波调频率,长合成孔径时间内目标运动还可能是不规则的,即动目标的多普勒参数具有时变性,这些问题都会导致动目标在SAR 图像上出现散焦。然而在较短的时间内,目标的多普勒参数具有相对的稳定性,可以认为其为常数。本文将采用少量脉冲对动目标成像并估计运动参数。由于脉冲数比较少,采取一般的距离-多普勒(RD)算法得到的结果分辨率较低。考虑到杂波对消后可认为数据中只有动目标信号,而且考虑到场景中的运动目标是有限的,因此动目标回波信号具有稀疏性,可以采用信号稀疏表示方法对其成像,并且该方法具有超分辨特性[1-2],还可以提高信号的信噪比,有利于动目标的检测。信号稀疏表示方法最关键的是超完备基的构造,本文结合动目标信号的特点对超完备基的构造方法进行了详细阐述。
常用的稀疏信号表示方法有匹配追踪[3](Matching Pursuit,简称MP),基追踪[1](Basis Pursuit,简称BP),FOCUSS[4],稀 疏 贝 叶 斯 学 习[5](Sparse Bayesian Learning,简称SBL)等方法。匹配追踪虽然效率很高,但是解的稀疏性和重构误差会受到影响;BP 方法得到的最优解并不一定为最稀疏解,即存在结构误差;FOCUSS 方法虽然全局最优解就是最稀疏解,但是受初始值影响很大,易收敛于局部最小值;SBL 方法可以防止结构误差,也不会收敛于局部最小值,但该算法是基于参数模型的,所假设的模型很可能与实际数据不符合。考虑到凸优化方法[6]得到的是全局最优、最稀疏解,因此本文将直接采用凸优化方法求解目标的多普勒参数。
1 SAR 运动目标模型
考虑两通道SAR-GMTI 系统,假设天线各通道间距为D,载机高度为h,飞行方向与X 轴方向平行。天线1、2 沿航向排列,采用全孔径发射两天线同时接收的模式。地面运动目标T 的坐标为(xn,yn),速度为(vx,vy),加速度为(ax,ay).设雷达发射信号为是LFM 信号的调频率,根据等效相位中心原理,回波信号为[7]
其中,

为避免快速目标引起的距离走动和方位多普勒参数的变化,取少量脉冲回波进行处理。对第i 个通道接收的回波信号进行距离脉压后有

补偿方位包络时延和相位差,通道1、2 信号对消得到[7]

其中,tm=m/PRF.
式(3)可简化为关于tm的LFM 信号形式
其中:
对式(4)进行时频分析可以得到其频率和调频率参数,但是在只有少量脉冲回波的情况下,由于分辨率较低和交叉项的影响,此时速度差异较小的两个目标是无法分辨的,如图1(b)的仿真结果所示。而采用信号稀疏表示方法则可以实现超分辨[8],同时可以避免经典时频分析方法中的交叉项的影响。
2 信号稀疏表示
假设已知s∈M,A∈M×N,M <N,A 的列向量构成超完备基,在无噪声情况下求解s=Ax 的稀疏信号表示问题可以描述为

其中,x 为s 在超完备基下的表示。最优化准则确保重构系数x 是稀疏的,约束条件保证重构后与原信号的误差很小,这是个凸优化问题,可以通过凸规划[6]求解全局最优值。在含噪声的情况下,模型为s=Ax+ε,ε 为Gauss 白噪声,这种情况下,目标函数为

其中:l1范数约束x 的稀疏性;l2范数约束x 在基A下与s 的拟合程度;λ 为正则化参数,它赋予两种约束条件之间的权重。
构造超完备基:Ψ={akl(t)},其中akl(t)=exp则,将t离散化


式(4)中调频率α 变化范围为[ka1,ka2],需要首先补偿掉信号中的ka1分量,即令

方便起见,还是记s'(n)为s(n).


其中:s=[s(1),s(2),…,s(M)]'∈M;Ai∈M;c=[c1,c2,…,cN]'∈N.
3 SAR 动目标稀疏表示
如果距离单元Rn有Q 个运动目标,那么式(4)可以表示为多分量线性调频信号形式:s(t)=分别为第k 个分量的幅度、中心频率和调频率。一般而言,一个距离单元上不可能有很多运动目标,即该信号具有稀疏性。对动目标进行成像常用的方法是Dechirp 方法,即补偿由载机运动引起的调频率后,对信号进行FFT 成像。如果还有动目标所引起的调频率项,利用FFT 方法会引起频谱的展宽,而且多分量信号的调频率是无法有效补偿的。
另外在FFT 中为得到较高的分辨率要求信号足够长,而信号较短时不可能对目标实现高分辨成像。本文讨论在脉冲数较少的情况下检测运动目标,这可以通过构造超完备频率-调频率基重构稀疏信号来解决。由于稀疏字典维数不能太大,即频率和调频率的分辨率是有限的,为提高调频率估计的分辨率可重新调整基中的调频率,使基的调频率尽量接近信号调频率,进一步细化频率-调频率估计值。假设已知信号中心频率为βi1,…,βiQ,调频率为αi1,…,αiQ,这时可以重新构造基

其中:
得到的频率项包含动目标速度引入的多普勒频移,所以还需要利用三通道做干涉获取运动目标的速度信息,从而补偿速度引起的多普勒频移,得到由目标位置差异引入的多普勒,实现对动目标的重新定位。基于稀疏信号表示方法进行成像的优点是一步就可以完成对某距离单元上所有动目标的成像,无须对每个动目标进行检测然后分别成像;如文献[9]中所述,采用l1范数能够提高分辨率;而且和FFT 方法相比较而言,不但能够更好地降低副瓣,同时也抑制了主瓣展宽的问题,尤其是在运动目标参数未知的情况下,可提高目标信噪比以利于检测。分析其原因,可见FFT 方法频谱的分辨率提高需要依赖于相干积累脉冲数的增加,而基于稀疏信号表示方法即使在少量数据的情况下得到的频谱分辨率也很高,即可以对动目标实现瞬时成像,有利于不断更新动目标状态。
4 仿真
为说明稀疏信号表示方法的有效性,首先给出点目标成像仿真实验,并将其结果与经典RD 成像算法进行比较。仿真参数:载机高度9 km,到场景中心的距离为12 km,波长为0.03 m,PRF 为786 Hz,载机速度为120 m/s,天线通道数为2,在场景中心放置3 个坐标重合的点目标T1~T3,径向运动速度分别为0 m/s,1 m/s,1.3 m/s,原始数据大小距离上为1 024 点,方位上为64 点。其中两个点目标存在径向速度,成像后将会在方位向上出现偏移[7],偏移量与径向速度成线性关系。而目标成像后存在一定的主瓣宽度,不同成像方法得到的主瓣宽度不同,也即速度分辨率不同,主瓣较宽时速度接近的两个目标像会出现重合(如图1(c)).
图1(a)为原始回波数据距离脉压后的结果,可以看到在少量脉冲情况下,3 个目标的轨迹重合并且不存在走动。图1(b)是对方位做Dechirp 处理的结果,由于相干积累点数过少,T2、T3 两个目标无法分辨,需要说明的是这里方位FFT 的点数为128 点。图1(c)为对图1(a)第513 个距离单元分别采用FFT 方法和基于稀疏信号表示方法得到的点目标方位像的归一化幅度比较图。从中可以看出,基于FFT 方法T2、T3 两个点目标是不能分辨的,而采用稀疏信号表示方法却是可以分辨的,而且后者主瓣所占多普勒单元数较少,同时副瓣电平较低,能量更加集中,从而提高了目标的信噪比,易于动目标检测。
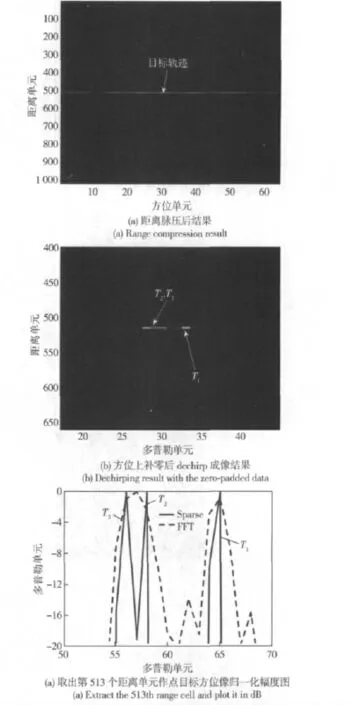
图1 点目标仿真Fig.1 Simulation result of point targets
5 实测数据处理及分析
所处理的数据为某所录取的三通道SAR-GMTI数据,天线采用全孔径发射子孔径接收的工作模式。选用包含高速公路的某块数据进行处理,方位点数取为512.稀疏信号表示方法的优势在于即使脉冲数较少,仍然可以有效地重构目标信号,这里取方位上位于中间的64 个脉冲的数据进行实验。
前后两通道数据进行距离脉压后再对消,结果如图2(a)所示,将此对消结果作为进行后续处理的输入数据。对每个距离单元数据分别采用Dechirp方法和稀疏信号表示方法分别进行成像。构造的超完备字典式(12)中取N1=128,N2=64,即确定了频率、调频率的采样率。注意首先按照式(11)补偿多普勒调频率项,对于剩余调频率项,范围取为[0,Δka].选取第223 个距离单元进行稀疏信号表示的结果见图2(b),图中每个网格代表字典中的一个原子。图2(c)为方位上64 点数据两边补零后利用FFT 成像的结果。图2(d)为用稀疏信号表示方法得到的结果,为便于对比,将动目标成像结果统一用dB 值表示,比较图2(c),图2(d)可见,稀疏信号表示方法得到的目标信号旁瓣比基于FFT 方法的结果要低,为直观起见,图2(e)给出了第438 个距离单元的对比结果,虚线表示FFT 成像结果,实线为基于稀疏信号表示方法的结果,可见为检测第88 个多普勒单元,后者检测门限可以提高5 dB 左右。所以稀疏信号表示方法使得目标图像具有较低旁瓣,同时不会引起主瓣的展宽。图2(f)为所取数据块对应的512 个接收脉冲进行Dechirp 成像得到的场景。

图2 FFT 方法和稀疏信号表示方法对动目标成像的结果Fig.2 Results of moving target using FFT method and sparse signal representation
由于选取的脉冲数较少,对于地面运动目标而言是不会产生越距离单元徙动的。不考虑距离向加速度,产生距离徙动的临界速度为c·PRF/(2mfs),其中,m 为脉冲数;fs为距离采样频率。例如取PRF=1 000 Hz,m=64,fs=50 MHz,临界速度为168.8 km/h,一般高速公路上车辆速度小于该值。若取λ=0.03m,可得所对应的PRF 不模糊速度为27 km/h.由于稀疏信号表示中频率维取的还是傅里叶基,无论是直接利用FFT 的方法还是基于稀疏信号表示的方法,对于快速目标而言,如果其多普勒中心偏移大于PRF/2 时就会引起PRF 模糊。在SAR-GMTI 体制中,对合成孔径时间内所接收的回波进行距离脉压后,前后通道信号对消就可以获得方位未压缩的动目标信号,快速目标的包络在距离上是走动的,计算距离走动率可以求得绝对多普勒中心的初估计以此来解PRF 模糊,而由干涉相位可得到精确的多普勒中心估计值,从而获得目标的运动参数[10-11]。而对于接收回波只有少量脉冲的情况,需要通过其它方法解PRF 模糊来检测快速目标,如采用多载频天线阵列[12]、发射多重频脉冲来解模糊等方法。
6 结论
文中采用稀疏信号表示方法进行运动目标成像,讨论了该方法相对于傅里叶变换方法在分辨率和检测信噪比上的改善。本文所用实测数据为多通道SAR-GMTI 数据,只需要少量脉冲就可以实现动目标超分辨成像,但是目前的数据是由Nyquist 采样所得,快速目标的多普勒偏移不能超过PRF/2,否则会引起PRF 模糊。所以在少量观测数据情况下,如何解决快速目标PRF 模糊,如何提高优化算法的计算效率,同时能够保证算法既具有全局收敛性,并且重构系数达到最大稀疏度,这些都还需要进一步的研究。
References)
[1] Chen S,Donoho D L,Saunders M A.Atomic decomposition by basis pursuit[J].SIAM Revies,2001,43(1):129-159.
[2] Zweig G.Super-resolution Fourier transforms by optimisation,and ISAR imaging[J].IEE Proc.Radar Sonar Navig.,2003,150(4):247-252.
[3] Mallat S,Zhang Z.Matching pursuit with time-frequency dictionaries[J].IEEE Trans.Signal Processing,1993,41(12):3397-3415.
[4] Irina F Gorodnitsky,Bhaskar D Rao.Sparse signal reconstruction from limited data using FOCUSS:a re-weighted minimum norm algorithm[J].IEEE Trans.Signal Processing,1997,45(3):600-616.
[5] David P Wipf,Bhaskar D Rao.Sparse Bayesian learning for basis selection[J].IEEE Trans.Signal Processing,2004,52(8):2153-2164.
[6] Tropp J A.Just relax:convex programming methods for identifying sparse signals in noise[J].IEEE Transactions on Information Theory,2006,52(3):1030-1051.
[7] 吕孝雷,苏军海,邢孟道,等.三通道SAR-GMTI 误差校正方法的研究[J].系统工程与电子技术,2008,30(6):1037-1042.LV Xiao-lei,SU Jun-hai,XING Meng-dao,et al.Study on the error calibration method for tri-channel SAR-GMTI[J].Systems Engineering and Electronics,2008,30(6):1037- 1042.(in Chinese)
[8] Varshney K R,Cetin M,Fisher J W,et al.Sparse representation in structured dictionaries with application to synthetic aperture radar[J].IEEE Transactions on Signal Processing,2008,56(8):3548-3561.
[9] Ciuciu P,Idier J,Giovannelli J F.Markovian high resolution spectral analysis[C]∥Proc.IEEE Int.Conf.Acoustics,Speech,Signal Processing,Phoenix:IEEE,1999:1601-1604.
[10] 吕孝雷,齐飞林,邢孟道,等.三通道SAR-GMTI 地面快速目标检测[J].系统工程与电子技术,2009,31(7):1581-1587.LV Xiao-lei,QI Fei-lin,XING Meng-dao,et al.Ground fast moving taget detection based on tri-channel SAR-GMTI[J].System Engineering and Electronics,2009,31(7):1581-1587.(in Chinese)
[11] 杨垒,王彤,保铮.地面运动目标不模糊径向速度估计的方法[J].西安交通大学学报,2009,43(8):76-79.YANG Lei,WANG Tong,BAO Zheng.Unambiguous radial velocity estimation method of ground moving target[J].Journal of Xi’an Jiaotong University,2009,43(8):76-79.(in Chinese)
[12] XIA Xiang-gen,WANG Gen-yuan.Phase unwrapping and a robust Chinese Remainder Theorem[J].IEEE Signal Processing Letters,2007,14(4):247-250.
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
中国临床医学影像杂志(2022年5期)2022-07-26
幼儿园(2021年12期)2021-11-06
北京航空航天大学学报(2021年9期)2021-11-02
医学新知(2019年4期)2020-01-02
家庭影院技术(2018年9期)2018-11-02
火控雷达技术(2016年2期)2016-02-06
小学生时代·大嘴英语(2015年7期)2015-11-23
物理教学探讨(2014年5期)2014-09-18
微型计算机(2009年4期)2009-12-23