无人炮塔火力线跟踪神经滑模控制
2011-02-22 07:29田建辉钱林方徐亚栋陈龙淼
兵工学报 2011年6期
田建辉,钱林方,徐亚栋,陈龙淼
(南京理工大学 机械工程学院,江苏 南京210094)
0 引言
为适应当代战争和非战争军事行动装备需求,一批具有极高战略机动性和精确火力的中口径轮式自行火炮得到发展。该类火炮采用自动装填技术和低矮的无人炮塔技术,缩减战斗人员,大大减轻战斗系统体积与重量,以增强整个系统机动性;采用更为先进的火力控制技术和弹药技术提高武器系统的反应速度﹑射击精度和灵活性。其中无人炮塔火力线瞄准机构,由炮塔旋转实现火力线方位向瞄准,由起落机构转动实现火力线高低向瞄准,对该动力机构实施精确的位置跟踪控制将成为保证火力精确性的基本途径之一。
当火力线跟踪并瞄准目标时,方向与高低机构运动是耦合的。Gu 在适当假设条件下建立了火力线的状态耦合动力学模型,并基于非线性状态反馈方法设计了线性控制器[1]。然而火力瞄准机构运动使动力系统参数摄动,连续射击时的冲击又使系统存在较大外部干扰。这2 个不确定因素使火力线跟踪控制变得困难。Man 针对机器臂轨迹跟踪控制中出现的类似问题,采用常规滑模控制器补偿机器人动力系统中的不确定部分[2]。Man[3]等之后又提出终端滑模控制器,加快了系统状态在滑模面上的收敛速度。Yu 和Feng 分别提出了全局快速[4]和非奇异终端滑模控制(Nonsingular Terminal Sliding Mode)[5],使系统从任意初始状态出发都能有限时间到达平衡点。但这2 种设计都存在滑模控制固有的抖振问题,并且要求不确定性上界为已知。
本文基于文献[1,5],将NTSMC 与神经网络技术[6-9]相结合应用于无人炮塔火力线跟踪控制中,构成神经滑模控制策略(Neural Network Sliding Mode).该方法采用径向基函数神经网络的在线学习能力自动补偿系统的参数摄动和外界干扰,实现火力线的精确跟踪控制,同时削弱抖振,保证动力系统稳定性。
1 问题描述
火力瞄准机构炮塔和起落机构运动耦合动力学方程如下[1]


式中:ΔM,ΔN 为火力瞄准机构运动造成的系统动力参数摄动;d 为火炮射击后的扰动力。一般有

式中:b0,b1,b2为正常数,‖·‖表示2 范数。
火力线跟踪控制目标要求高低和方向构件转角q 能够精确跟踪火控指令qr∈R2.对于二阶系统的火力线位置跟踪,非奇异终端滑模面为[5]

式中:ε=q-qr为位置误差;为速度误差;C=diag[c1,c2]为常数对角阵;α,β 互奇,且满足
非奇异终端滑模控制律(NTSMC)为

其中:

式中:C-1,W-1分别为C 和W 的逆矩阵;和如前定义。
该控制律作用下,火力线跟踪系统是稳定的,并在有限时间内跟上指令。在=0 时,将式(5)代入式(1)有

此时火力线动态特性取决于指令加速度和不确定动力项。对于火力线初始位置偏离指令,且偏差速度为0 时,控制律式(5)将不能保证系统状态到达滑模面,也就不能使火力线精确跟踪并瞄准目标。另外该控制律要求事先给出不确定项的上界,而依据该上界进行的不确定动力补偿,在控制输入的剧烈抖动中将造成较大能量损耗。
2 神经滑模控制器
火力线跟踪神经滑模控制器(NNSMC)结构如图1所示,炮塔和起落机构的控制输入通道各有一个RBF 神经网络补偿器。通过在线学习,辨识并补偿不确定动力部分,满足火力线精确跟踪指令的控制要求。两通道上采用的神经网络结构相同,都有2 个输入和1 个输出。
2.1 RBF 神经网络
图1中炮塔和起落机构控制输入通道的RBF神经网络输入向量分别为神经网络径向基向量分别为Φ1=[φ11φ12φ13]T,Φ2=[φ21φ22φ23]T,其中φij(i=1,2;j=1,2,3)为高斯基函数

图1 神经滑模控制器结构Fig.1 Neural sliding mode control scheme

式中:σij=[σij1σij2]T为第i 个网络隐层第j 个节点的中心向量;lij为相应节点基宽。神经网络权向量分别为ω1=[ω11ω12ω13]T,ω2=[ω21ω22ω23]T,则第i 个网络输出为

则2 个网络构成的输出向量为h=[h1h2]T.
2.2 神经滑模控制器设计
定理1 对于火力线瞄准动力系统(1)式,采用式(4)的滑模面,则控制器τ=τ0+τn,将使火力线位置跟踪误差有限时间内收敛到0.其中

式中:A 为正常数,h1(s1,)和h2(s2,)为两个网络的输出,分别是对不确定动力项ρ1(t)和ρ2(t)的逼近。
由于RBF 神经网络工作的实质是迫使系统状态在系统摄动和受到外部扰动时重新回到滑模面上,也即使s 和都为0.因此以E=si=0 为神经网络的目标函数,以梯度下降法调整各参数如下

其中:


式中:ψi为正常数;mii为W-1的对角元。
神经网络的参数学习算法为

式中:λ ﹑ γ 分别为神经网络学习的速率和惯性系数。
注1 式(18)的推导如下

代入控制器τ 后有

式(22)中τni的相关项是

式中:“其它”表示不含因子τni的相关项;以参数ψi表示对的估计,并将式(25)对τni求导即有式(18).
2.3 稳定性分析
定义李亚普诺夫函数

定义神经网络输出τn对不确定项ρ 的逼近误差向量δ=ρ-τn,且δ∈R2.对(24)式求导后并代入式(22)知


由上式知,若di>‖W-1‖,且si>δi,则有<0.s 将收敛至s≤‖δ‖.因为神经网络的逼近误差极小,这保证了火力线跟踪系统的精度要求。
3 仿真
现以某无人炮塔火力瞄准机构控制仿真实验验证提出的神经滑模控制策略,炮塔和起落部分运动耦合动力学模型如下[1]

式中:定义sinqi=si,cosqi=ci(i=1,2),则动力学模型中各项为

火力瞄准机构标称惯性参数为Iyy=2 547 kg·m2,Ixx=5 400 kg·m2,Iyy=5 343 kg·m2,Izz=224 kg·m2,Ixy=-2.8 kg·m2,Iyz=13.7 kg·m2,Izx=0.8 kg·m2;炮塔底平面到炮耳轴线的高度H=0.6 m,炮口至炮耳轴线长度L=6.285 m.
该火力瞄准机构有全方位射角,高低射界为-5°~70°,其任务空间为以炮耳轴线中点为球心的球带区域。假定目标在该火炮有效射击区域内以匀速=30°/s 沿圆形轨迹机动,对应炮口轨迹半径R=0.8 m,轨迹平面与水平面夹角ξ=arccos(R/L),则瞄准目标时炮口在炮塔底平面回转轴处坐标系下位置为(Rsint,L- R(1- cost)cosξ,H+ R(1-cost)·sinξ).由此知炮塔回转期望轨迹qr1=arctg((L-R(1-cost)cosξ)/Rsint),高低向起落部分转动期望轨迹qr2=arctg
非奇异终端滑模切换面参数α=5,β=3,C=diag[1 1],A=diag[100 100].
RBF 神经网络的学习速率λ=0.5,惯性系数γ=0.2;预估参数ψi=1;网络在线学习参数,权向量初值ω=(0.5,0.5,0.5),σ=(- 0.5,0,0.5;-0.5,0,0.5)为径向基函数中心初值,其宽度初值l=(1,1,1).
设仿真2.5 s 时刻高低与方向输入受到短时0.05 s 的常值扰动分别为d1=1 500 N·m,d2=2 000 N·m;不确定项的边界参数b0=3 000,b1=2,b2=3.
火力瞄准机构初始位置和速度为q1(0)=90°,
采用NTSMC 仿真如图2和图3所示,采用NNSMC 仿真如图4和图5所示。其中q1,q2分别为方位向炮塔机构和高低向火炮起落机构的位置跟踪轨迹,且实线为指令轨迹、虚线为实际轨迹。u1,u2分别为方位向和高低向控制力矩。

图2 NTSMC 位置跟踪曲线Fig.2 The position tracking by NTSMC

图3 NTSMC 控制力矩曲线Fig.3 The control torque by NTSMC

图4 NNSMC 位置跟踪曲线Fig.4 The position tracking by NNSMC
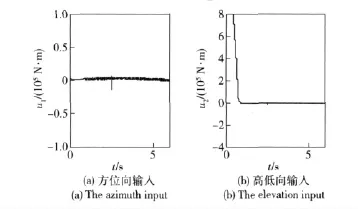
图5 NNSMC 控制力矩Fig.5 The control torque by NTSMC
对比仿真结果知,在NTSMC 和NNSMC 的控制器作用下,2 种控制方式均实现了火力线位置的精确﹑鲁棒跟踪。由于火力线高低向机构实际初始位置相对期望位置有偏差,因此NNSMC 初期的网络学习过程延迟了系统状态收敛时间至1 s.但NNSMC 经过了初期学习阶段,在后期动力系统摄动或发生外部干扰情况下,不须NTSMC 对不确定上界预先给定的要求,而且控制中的抖动被大大削弱。
4 结论
1)依据李亚普诺夫稳定性理论分析可知,由于神经网络能以极小误差逼近火力线跟踪动力系统中的不确定动力项,因此神经滑模控制方法将有效保证无人炮塔火力线位置跟踪精度。
2)通过对某无人炮塔火力瞄准机构的控制仿真实验可知,以径向基神经网络控制输出逼近非奇异终端滑模的切换控制项,不仅消除了原控制器对不确定上界预估的需求,而且柔化控制信号并削弱控制中的抖振。
3)针对无人炮塔火力线跟踪系统中存在动力参数摄动和外部干扰的不确定性问题,本文建立了相应的数学模型进行描述,并根据该动力学模型提出适当的控制方法。这一工作为该类武器发射平台高性能控制的分析与设计提供一种理论参考。
References)
[1] Gu Y L,Loh R N K,Coleman N.Control of weapon pointing systems based on robotic formulation[C]∥Proceedings of the 1992 American Control Conference,Chicago:IEEE,1992:413-418.
[2] Man Z.Paplinski P.Robust tracking control for rigid robotic manipulators[J].IEEE Translations on Automatic Control,1994,39(1):154-159.
[3] Man Z,Yu X.Terminal sliding mode control of MIMO linear systems[J].IEEE Transactions on Circuits and Systems I:Fundamental Theory and Applications,1997,44(11):1065-1070.
[4] Yu S H,Yu X H.Robust global terminal sliding mode control of SISO nonlinear uncertain systems[C]∥Proceedings of the 39th IEEE Conference on Decision and Control,Sydney:IEEE,2000:2198-2203.
[5] Feng Y,Yu X.Non-singular terminal sliding mode control of rigid manipulators[J].IEEE Translations on Automatica,2002,39(12):2159-2167.
[6] Huang S J,Huang K S,Chiou K C.Development and application of a novel radial basis function sliding mode controller[J].Mechatronics,2003,13(4):313-329.
[7] Lin C.Nonsingular terminal sliding mode control of robot manipulators using fuzzy wavelet networks[J].IEEE Translations on Fuzzy System,2006,14(6):849-859.
[8] Yildiz Y,Sabanovic A,Abidi K.Sliding mode neuro-controller for uncertain systems[J].IEEE Trans on Industry and Electronics,2007,54(3):1676-1684.
[9] 穆效江,陈阳舟.多关节机器人的神经滑模控制[J].计算机工程与应用,2009,45(11):245-248.MU Xiao-jiang,CHEN Yang-zhou.Neural sliding mode control for multi-link robots[J].Computer Engineering and Applications,2009:45(11):245-248.(in Chinese)
猜你喜欢
政工学刊(2021年4期)2021-04-13
房地产导刊(2020年7期)2020-08-24
中国惯性技术学报(2019年6期)2019-03-04
智能计算机与应用(2018年5期)2018-10-20
车迷(2018年12期)2018-07-26
北京航空航天大学学报(2017年4期)2017-11-23
现代兵器(2017年9期)2017-09-28
火力与指挥控制(2017年3期)2017-04-24
北京航空航天大学学报(2016年7期)2016-11-16
现代兵器(2016年10期)2016-10-26