
踝关节假肢的机械结构设计
2011-05-08 01:21王祯祥赵伟钦
中国新技术新产品 2011年2期
王祯祥 尚 昆 阮 超 赵伟钦 郭 丹
(上海理工大学医疗器械与食品学院,上海200093)
引言:根据2006年国务院残疾人工作委员会抽样调查数据显示,全国肢体残疾人数约为2400万人[1]。近年来,随着工业、交通业的迅速发展,这一数字正以惊人的速度增加,极大地增加了社会的负担。在现有医疗水平尚不能使肢体再生的情况下,为了帮助肢体残疾者恢复一定的生活自理和工作能力,提高其生活质量,为残疾人开发和研制现代化舒适的假肢产品成为国内外假肢行业的一项重要任务。
假肢的作用是代偿肢体伤残者所失去的部分肢体功能,使其恢复一定的生活自理和工作能力。在现今假肢行业中,踝关节假肢作为人体下肢的重要组成部分,也是最为灵活的部分。在理论研究和实用产品设计方面都有很大的发展,但与髋关节和膝关节假肢的设计和产品相比,相关研究都比较滞后,使得假肢踝关节产品未能很好的满足假肢患者的需求。
本文从生物力学、解剖学和生理学角度出发[2-3],分析了踝关节在行走过程中的步态运动规律、受力特点和生理功能。基于仿生学原理,设计了踝关节假肢的机械结构,完成了假肢产品开发和生产的前期工作。
1 踝关节的生物力学分析
踝关节是既稳定又灵活的负重关节,是人体与地面接触的枢纽。人体能够完成站立、行走、下蹲、跑跳等动作,与踝关节的结构及肌肉的动力作用密切相关。在人体行走的整个步态周期中踝关节起着至关重要的作用。在着地支撑阶段,脚跟着地后踝关节背屈吸收地面给人体的冲力,当冲力下降到足够小时,屈曲停止,开始回复,使身体重心始终保持水平动量,绕支撑脚转动实现从支撑阶段到推进阶段的平稳过渡。在整个后蹬阶段,由蹬地腿的弯曲位置开始踝关节伸展跖屈为行走提供动力,在摆动阶段从脚尖离地开始摆动腿稍折叠踝关节,使足向前摆动保证运动的平稳性。
临床实验研究和分析发现踝关节在脚跟着地时产生轻微的背屈作用力。随着承重的增加很快产生跖屈作用力,跖屈作用力在足平着地时达到最大,从支撑中期开始产生较强的背屈作用力,并在蹬离期达到最大。整个人体步态周期中踝关节的角度变化如图1所示。在足平着地和支撑中期关节跖屈达到15°,后胫骨向前方旋转至约3°,背屈位之后背屈继续增大,到蹬离期渐渐跖屈至脚趾,离地期跖屈至最大角度20°,之后在背屈肌群的作用下产生背屈至最大5°,使脚尖顺利抬起。整个过程中踝背屈肌群主要是为保护踝关节,不至使其急剧跖屈损坏关节。而跖屈肌群则是起到阻尼作用防止背屈,同时驱动和防止膝猝屈,也为脚尖顺利抬起提供动力。作为人体最为灵活的关节,踝关节除了有冠状面的跖屈、背屈运动外同时还有内外翻和内外旋运动,这些运动有效的保证了踝关节正常的功能,最大程度的满足了人体运动的要求。踝关节的功能主要是背屈、跖屈与负重,因此在踝关节机械结构设计以及运动设计中,既要保持其负重的稳定性,又须注意活动的灵活性。

2 踝关节的机械结构设计
基于人体生理学、人体解剖学、人体生物力学的原理和人体踝关节在步行时的受力特点和生理功能,对踝关节假肢的机械结构进行设计,整个踝关节假肢的机械结构由三部分组成,分别为稳定性机械结构部分、屈伸运动功能机械结构部分和辅助装置机械结构部分。
2.1 稳定性机械结构。稳定性结构[4]是踝关节在正常运动过程中,保证其平稳的在矢状面内运动的同时能够在其它矢量平面内也有分运动,但是变化角度都比较小。这样既可以增加关节运动的灵活性和适应性,同时也要模仿人体自身踝关节的内外侧三角韧带,当关节角度变化很大时可以及时的调整关节回到正常的稳定区域。正常的关节运动变化是限制在一定的角度范围,这是与韧带自身产生的拉力变化以及回复能力相关联的。韧带的变化既要保证关节有一定的运动变化范围,同时也可以回复到原始的运动状态。踝韧带对踝关节的稳定性起着重要的作用。当人体在正常行走过程中,如果路面存在一定的不平整性,踝关节的内外翻运动可以有效的保证人体运动的稳定性,以及防止踝关节着地缓冲时造成关节损伤。所以韧带模型的设计是踝关节模型设计的重要组成部分。韧带在踝关节运动时起到拉力以保证踝关节稳定性的作用,并且这种力学关系是属于非线性的,因此采用非线性的压簧模型进行设计,踝关节具体运动模型和稳定性模型分别见图2和图3,踝关节稳定性机械结构设计如图4所示。

图2 踝关节运动模型
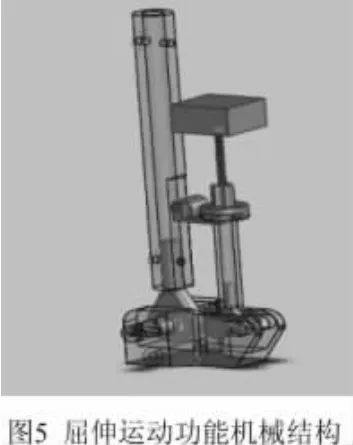
2.2 屈伸运动功能机械结构。屈伸运动是通过丝杆、滚子、轴承等转动或传动来实现。踝关节在矢状面的背屈、跖屈运动是通过丝杆在转动过程中带动下面的轴承在规定的角度范围内运动,同时丝杆的旋转作用带动滚子做上下运动,并通过轴承运动轨迹的限定装置来实现关节的运动和幅度是在一定的限制范围内,但又必须能够满足正常人体踝关节的屈伸运动变化范围,最终来实现踝关节的屈伸运动功能,具体设计的踝关节屈伸运动功能的机械结构模型如图5所示。

图3 踝关节稳定性模型

图4 稳定性机械结构
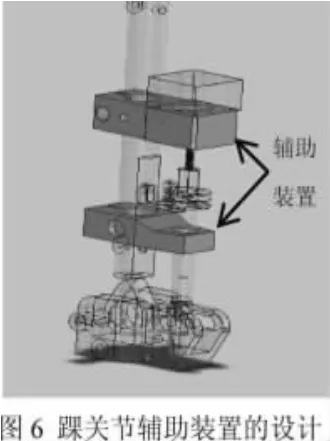
2.3 辅助装置机械结构。辅助装置机械结构主要是为了固定轴承与轴承之间的距离,同时起到支撑和固定踝关节的作用,保证整体设计的美观性和合理性。辅助装置具体部件如图6箭头表示的零部件。
结论:本文从生物力学、解剖学和生理学角度出发,分析了踝关节在行走过程中的步态运动规律、受力特点和生理功能。基于仿生学原理,设计了踝关节假肢的机械结构,通过SOLIDWORKS三维实体开发平台进行仿生踝关节的实体建模,绘制了相关部件的机械结构图,完成了假肢产品开发和生产的前期工作。
[1]中华人民共和国国家统计局.2006年第二次全国残疾人抽样调查主要数据公报 [J].中国康复理论与实践,2006(12):1013.
[2]华佳,顾海燕,王伟力等.正常踝关节内外侧韧带的解剖及其影像学表现 [J].解剖学杂志,2007,30(5):609-613.
[3]毛宾尧.人工踝关节外科学[M].人民军医出版社,2005.
[4]夏昊昕.下肢康复训练机器人的研究[D].哈尔滨工程大学,2003.
猜你喜欢
中老年保健(2021年7期)2021-08-22
临床骨科杂志(2021年4期)2021-08-20
保健与生活(2021年6期)2021-03-16
意林·全彩Color(2018年7期)2018-08-13
中国运动医学杂志(2016年3期)2016-07-10
中华骨与关节外科杂志(2016年6期)2016-05-17
中国民族医药杂志(2016年5期)2016-05-09
中国康复理论与实践(2015年7期)2015-05-09
发明与创新(2015年33期)2015-02-27
中国中医药现代远程教育(2014年23期)2014-03-01
