
牵引变流器直流母线电压脉动下的无拍频电流控制方法
2011-07-25 07:04欧阳晖张鹏举
电工技术学报 2011年8期
欧阳晖 张 凯 张鹏举 康 勇 熊 健
(华中科技大学电气与电子工程学院 武汉 430074)
1 引言
牵引变流器是一种单相交流接触网供电的大功率交-直-交功率变换装置,其典型结构如图1所示,整个系统由牵引变压器、单相 PWM整流器、直流母线、三相PWM逆变器及其驱动的感应电动机组成。除图1所示的两电平拓扑外,变换器还可选用其他结构(如多电平拓扑),但限于轨道交通的特殊性,系统输入一般为单相交流形式。

图1 交流供电牵引变流器的典型配置Fig.1 Typical configuration of AC-fed railway traction drive
单相整流器的主要问题在于其输入和输出功率皆以网压的2倍频脉动(以50Hz交流输入为例,此时输入/输出功率以100Hz脉动),由此导致直流母线中含有网压的2倍频率分量。在这种脉动的母线电压下进行正弦脉宽调制,会在逆变器输出侧产生额外的次谐波,即所谓“差频”或“拍频”分量[1-3]。当机车运行于高速段时,调制波频率与母线脉动频率非常接近,此时拍频分量的频率极低,幅值较小的拍频电压即可导致可观的拍频电流。该拍频电流可能引发电动机转矩脉动、转动噪声、机械部件谐振以及额外的功率损耗[1-2,4-6],降低系统的稳定性和乘员的舒适性。
目前,业界针对拍频问题的主流方法是在母线支撑电容上并联一个在母线脉动频率点谐振的 LC滤波环节,用以吸收流经直流母线的脉动功率。由于谐振频率低,该滤波器往往具有较大体积,因而牺牲了整个装置的功率密度。此外,无源元件的参数漂移和网压频率波动也使得精确的调谐难以实现,故支撑电容的容量常需设计得较为保守。国外某些新型机车已有单纯加大母线支撑电容的方案[7],以淘汰能量密度较低的谐振电感。相比传统的 LC无源滤波方案,前者需显著增大支撑电容量方足以吸纳母线脉动功率,而大容量的支撑电容又令系统的短路保护更为复杂。
与硬件方案相比,控制技术能以较低的成本缓解拍频问题。文献[8-9]提出的瞬时电流反馈可有效抑制拍频电流。然而该方案的效能有赖于高带宽的电流反馈环路,对于大功率牵引变流装置而言,开关频率不高,电流环的带宽受限。
与反馈控制律不同,前馈补偿方案[1,3-4,10-16]具有效果好、易于实现的优点。这一类方法的基本原理可归纳为以母线电压瞬时值的倒数规律对调制比或脉冲宽度进行实时补偿。即便母线电压剧烈波动,面积等效仍可实现。
然而,工程实际中要准确获取前馈补偿方法所需的母线电压“真实值”并非易事。首先,较低的开关频率(对大功率牵引变流器而言,逆变侧开关频率常与母线电压脉动频率处于同一数量级)意味着设计者仅能利用间隔稀疏的母线电压采样值进行脉冲宽度计算。此外,为了实现0~100%的占空比利用,脉冲宽度的计算工作一般提前至上一开关周期完成,这就使得情况愈发糟糕。截至目前,传统的前馈补偿方案在直流母线电压剧烈脉动下的成功应用并不多。
文献[14]提出了一种用于预测直流母线电压的线性观测器,归因于其线性性质,当母线电压的变化率改变时,该算法的预测精度不高。诚然,高性能的预测算法依然是解决拍频问题的关键。重复控制[17-22]作为一种跟踪周期性指令以及抑制周期性扰动的有效手段,得到了学术界的普遍认同。作者曾应用重复控制算法成功构造了一个针对不间断电源逆变环节的扰动观测器[23]。本文提出了一种可精确预测直流母线电压的重复预测器,较为理想地解决了传统前馈补偿方案的应用困局。
2 问题描述
2.1 拍频现象


式中,U1m和ω1分别为逆变器输出相电压的基波幅值和基波频率;m为调制比。
假定实际的直流母线电压中还含有一幅值为Ur,相位和频率分别为θr和ωr的脉动成分,即

相应地,输出相电压为

以a相为例,输出相电压可展开为

式(4)后两项即为输出电压中的次谐波(拍频)分量,它们是由脉动的母线电压与逆变器开关函数的交叉调制过程产生的。若将开关函数的高频分量纳入讨论范畴,则可导出更为丰富的差频分量。但由于次谐波的低频性,式(4)后两项可视作逆变器输出侧拍频分量的主要成分。
当逆变器输出电压频率接近母线电压脉动频率时,拍频频率ωr-ω1将变得极低,幅值较小的拍频电压就能在电动机定子侧引发极大的拍频电流,从而导致电动机转矩脉动以及额外的功率损耗。
2.2 前馈补偿原理及其实施困难
为抑制拍频分量,可由当前直流母线电压对开关函数进行修正。令修正后的开关函数为

式中

为修正后的调制比。相应地,输出电压为

显然,修正后的输出电压不再包含拍频成分,此乃前馈补偿法的基本原理。
若作用于补偿过程的不是直流母线电压的真实值ud(t),而是其预测值(t),且两者之差为e(t),则

由式(8)可知,只有通过预测算法将误差e(t)限制在足够低的水平,方能获得理想的前馈补偿效果。
工程实际中,下述因素会恶化预测误差:
(1)数字化PWM过程。数字控制在多方面具有模拟控制难以比拟的优势,然而数字控制器一般在离散的采样点处进行脉冲宽度计算。归因于零阶保持过程,采样点之间的母线电压“真实值”被忽视了。
(2)低开关频率。额定功率在1MW及以上的牵引变流器,开关频率一般不超过1kHz。极低的开关频率加剧了零阶保持过程造成的误差。
(3)一拍超前效应。为规避代码执行时间对脉冲宽度的挤占,常将脉冲宽度的计算任务提前一拍进行。在这种情况下,零阶保持过程造成的误差被进一步恶化。
假定1个母线电压脉动周期内包含10个开关周期,图2展现了实施前馈补偿方法的困难之处:母线电压在当前拍的采样值尚不足以作为ud的精确描述,遑论下一拍。

图2 低采样/开关频率下的零阶保持误差Fig.2 ZOH errors with low sampling/switching frequency
数字化 PWM通常将开关周期内的母线电压视为常值。实际上,用母线电压平均值描述母线电压是足够精确的。如图 3所示,采用对称 PWM,假定每个开关周期内母线电压的变化率恒定,则不论脉宽计算过程中使用的是母线电压均值(udav)还是其实际值(ud),面积等效算法求得的脉冲边沿重合。因此,只要能提前获知下一个开关周期内母线电压的平均值,前馈补偿方法的困局便可迎刃而解。
应当注意,若采用不对称 PWM,图 3中正负面积并不完全抵消,上述结论不成立。

图3 应用母线电压平均值计算脉冲宽度Fig.3 Pulse area equalization with average value of DC link voltage
3 带重复预测器的前馈补偿
3.1 预测器结构和工作原理
图4为重复预测器的结构框图。预测器前端锁相环(Phase Locked Loop,PLL)的作用是微调重复预测器的采样频率,使A-D转换始终与电网频率同步。具体实现时,可复用整流侧的锁相环模块。采样频率一般设计为开关频率的Nc倍(Nc>1),以便尽可能详细地获知母线电压信息,从而精确求取下一个开关周期内母线电压的平均值。其中,Nr是一个母线电压脉动周期内所含采样点数,Nc是一个开关周期内所含采样点数。

图4 重复预测器结构框图Fig.4 Block diagram of repetitive predictor
图 5中,t=t1为当前时刻,重复预测器的作用是精确预测出下一个开关周期内 [t1+TSW,t1+2TSW]母线电压的平均值。倘若能够提前2个开关周期估计出未来2拍的母线电压值,即

将ud_pre(z) 的历史值作为对ud(z) 未来值的估计,则母线电压的均值预测可由滑窗平均求出

图 5 ud_pre(z),udav_pre (z),ud(z)和 udav(z)的关系(虚线表示未来值)Fig.5 Relationship among ud_pre(z), udav_pre (z), ud(z) and udav(z) (Dashed curves denote future values)
显然,ud_pre(z) 是重复预测算法的关键所在。图4中,将ud_pre(z) 延迟2个开关周期得到ûd(z),后者再与母线电压最新一次的采样值ud(z) 进行比较。如果ud(z) 在每个母线电压脉动周期内的重复性能够得以保证,则稳定的重复预测算法可确保ûd(z) 最终收敛到ud(z);与此同时,ud_pre(z) 自然地成为了2个开关周期之后ud(z) 的精确预测。
积分结果ei(z) 经过下述环节得到修正项ur(z):
(2)增益Kr。对ur(z) 的幅值进行限制,以兼顾算法的收敛速度和稳定性。
(3)低通滤波器S(z)。滤除误差中的高频成分。

最终,ur(z) 与前馈项ud(z) 相加得到ud_pre(z)。之所以引入前馈,是因为在算法运行之初,ud(z) 自身作为母线电压的预测值ud_pre(z) (不妨将此阶段称为“零阶预测”),此时预测误差较大;预测误差将引发针对前馈通道的重复校正,若ud(z) 的重复性能够得到保证且重复预测算法稳定,则稳态时ûd(z)收敛至ud(z)。
3.2 脉冲宽度和占空比计算
考虑到开关频率较低,本文使用面积等效算法进行脉冲宽度和占空比计算。如图3所示,每个开关周期内,逆变器实际输出电压的伏秒累加值应与期望输出电压所包围的面积相等
则脉冲宽度为

占空比为

对b,c相有类似结果。
3.3 变开关频率应用
若采用较高的开关频率(比如1~2kHz),则开关频率可在整个调速范围内保持不变。否则,就应当针对不同调速阶段选取不同的载波比,即所谓“分段同步调制”,这将导致开关频率在整个调速范围内作小幅波动。
前文对固定开关频率进行了讨论。当开关频率变化时,udav_pre(z) 的计算将涉及ud_pre(z) 窗口宽度不等的数据片段。例如,当udav_pre(z) 计算式(10)中的分母由Nc变作Nc-1时,开关周期相应地变为

此时开关频率的变化不连续。事实上,由于采样频率比开关频率高得多,每个采样周期内的母线电压可近似视为恒值。因而不妨将非整数个ud_pre(z)用于udav_pre(z) 的计算,这使得开关频率的连续变化成为可能。
另外,为适应变开关频率应用,图4中ud_pre(z)与ûd(z) 之间的延迟单元应由可能取到的最低开关频率决定;在逆变器运行过程中,该延迟单元保持不变,只需根据当前开关频率在线调节滑窗平均的窗口宽度即可。
4 参数设计及实验结果
重复预测算法的仿真和实验在一台 3kW 样机上完成,样机的主要参数在下表中列出,感应电动机的负载由挂接电阻箱的直流发电机实现。

表 3kW样机系统参数Tab. System parameters of 3 kW test rig
其中,之所以将逆变器开关频率设计为 1kHz而非更低,是基于以下几点考虑:当前,该开关频率是额定功率为 1MW及以上的牵引变流器的主流取值;其次,对于更低的开关频率,本文所提方案的拍频抑制效果只会更好;而对于 1kHz以上的开关频率而言,只要确保重复预测算法在每个采样周期均能执行完毕,本方案在拍频电流抑制方面仍具优势。随着开关频率的提高,即便应用传统前馈补偿方案,母线电压的预测值与当前拍实际值之间的误差也逐渐变得不显著,重复补偿方案提升有限。
4.1 参数设计
重复预测器的参数设计过程可参考文献[18]。根据表 1列出的参数,取Nr=100,Nc=10。滤波器S(z) 的截止频率为 1500rad/s,10kHz采样频率下,其离散形式为

滤波器S(z) 使得重复控制算法仅对预测误差中200Hz以下的分量进行抑制。如图 6所示,在 2 000rad/s以下,延迟环节z-10与S(z) 的相频特性趋近,故选取超前步长k=10,对应的超前环节z10为S(z) 提供高精度的相位补偿。
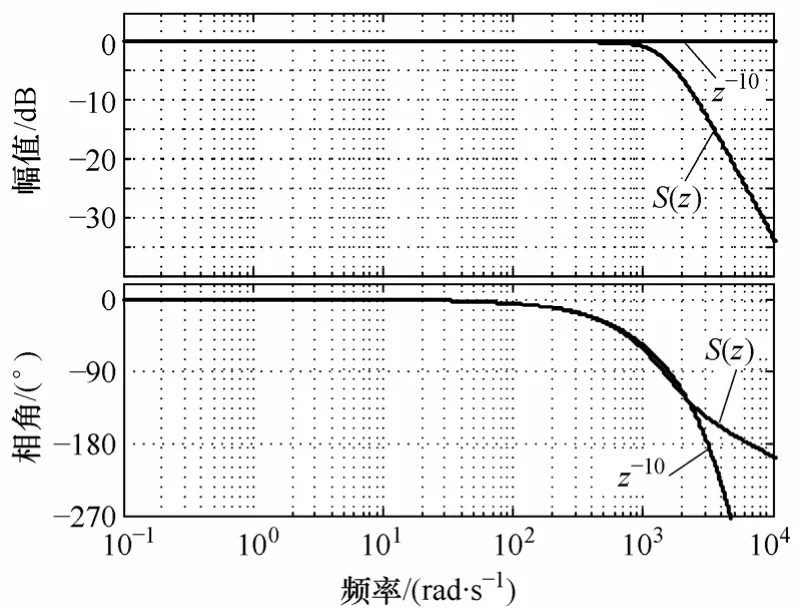
图6 S(z)和z-10的伯德图Fig.6 Bode diagrams of S(z) and z-10
为提高算法的预测精度,选取陷波器型Q(z),其陷波点位于系统的奈奎斯特频率

本质上,Q(z) 是一个具有零相移的低通滤波器,其伯德图如图7所示。

图7 Q(z)的伯德图Fig.7 Bode diagram of Q(z)
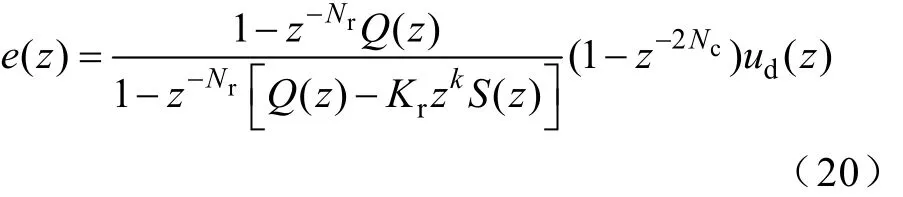
由图4可得预测误差e(z) 和指令ud(z) 之间的传递函数为

根据小增益原理,系统稳定充分条件是

式中,H(ejωT)=Q(ejωT)-KrejωkTS(ejωT);T为采样周期。式(18)的几何意义是,为了确保系统稳定,矢量H(ejωT) 的端点不应超出圆心位于原点的单位圆。令Kr=0.75,矢量H(ejωT) 的轨迹图如图 8所示。由图可见,在整个频率范围内(从0rad·s-1到奈奎斯特频率ωN),H(ejωT) 的轨迹都落在单位圆内,重复预测算法稳定。

图 8 矢量 H(ejωT)的轨迹Fig.8 Locus of vector H(ejωT)
4.2 预测误差
断开图4中的重复校正部分,则整个重复预测器演变为一个零阶预测器,也就是说,ud_pre(z) 此时是由最新一次采样的ud(z) 充当,预测误差为

重复校正部分投入工作后,由式(17),预测误差为

应当注意,上述结论的前提是直流母线电压的“重复性”能够得以完美保证。在系统实际运行过程中,这一前提并不总是满足。
4.3 算法仿真
令ud(z) 由 400V的直流分量和峰-峰值为 40V的 100Hz脉动分量组成,其波形如图 9a所示。重复预测器在t=0.2s投入,算法的动态响应过程如图9b所示。

图9 重复预测器的预测误差收敛过程Fig.9 Prediction error convergence process of the repetitive predictor
重复预测器投入前,前馈通道的零阶保持作用引发了可观的预测误差。归咎于零阶保持过程(见图2b),误差的幅值甚至大于100Hz脉动本身。重复预测器投入后,预测误差在3~4个母线脉动周期后迅速收敛到0。
令 100Hz脉动峰-峰值占母线电压直流成分的比例在10%~50%之间变化。随着脉动成分的增加,传统前馈补偿法和重复补偿法的预测误差变化曲线如图 10所示。可见,即便脉动峰-峰值占到母线电压直流成分的50%(即脉动幅值100V),重复预测法的预测误差幅值也仅为 4.98V(该预测误差幅值在收敛过程的第4个母线脉动周期处采得),尚且远小于传统前馈补偿法在百分比等于10%所对应的预测误差23.51V。

图10 脉动成分-预测误差曲线Fig.10 Prediction errors vs. DC ripple component
因此,只要确保100Hz脉动电压的重复性,稳定的重复预测器就有能力将预测误差维持在较低的水平。本文提出的无拍频电流控制方法对于脉动幅值的变化适应性良好。
5 实验结果
重复预测算法在一片 TMS320F2812定点数字信号处理器中实现。整个算法总计占用了18 432个静态存储单元中的220个,主要用于存储重复预测算法的预测误差数据。经测试,在100MHz主频下,重复预测算法的执行时间共计55μs,对于100μs采样周期而言余量足够。此外,在低开关频率下,A-D转换器的采样、保持延时对算法性能影响不大,不必对其额外补偿。
在单相PWM整流器输出脉动直流电压的供给下,逆变器输出电流波形及其频谱如图11所示。图11a为母线电压波形,母线电压脉动峰-峰值约40V,占直流分量的10%,逆变器调制波频率为95Hz。

图11 三种情况下拍频电流的稳态值对比Fig.11 Comparison of steady-state beat currents with different methods
不作任何补偿时,将一常量作为当前时刻的母线电压进行脉冲宽度计算,波形结果如图11b和图11c所示。此时,在定子电流中含有显著的(3.5A)拍频分量。若将最新一次采样的ud(z) 作为当前母线电压,意即将图4中的ud(z) 作为ud_pre(z),其结果如图11d和图11e所示,定子电流中的5Hz拍频分量被抑制到2.4A。可见,该方案相对于无补偿情况略有改善,但显然还存在不少提升空间,这从一个侧面也反映出传统前馈补偿方案的局限性。
应用本文所提出的重复预测器对传统前馈补偿方案进行改进,实验结果如图11f和图11g所示。此时,定子电流中的拍频分量衰减至 0.35A,相比基频分量几乎可以忽略。残留的拍频电流主要由母线电压的预测误差引起,后者又与直流母线电压重复性不甚理想有关。实际上,网压和负载的小幅波动、数字控制器的有限字长效应等因素都有可能导致母线电压不按100Hz理想复现。
为评估重复预测器的动态性能,实验中采取突加/突卸负载的方式制造母线电压的跌落和过冲。图12~图 14为动态过程中母线电压ud(t)、预测误差e(t) 和定子电流ia(t) 的时域波形。

图12 负载突卸过程Fig.12 Load switching-off process
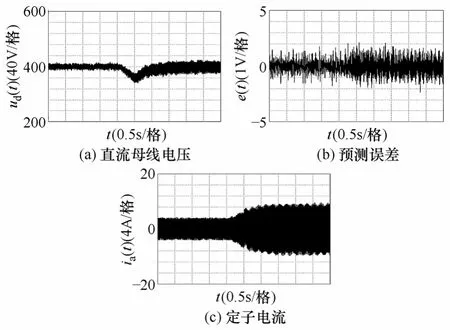
图13 负载突加过程Fig.13 Load switching-on process
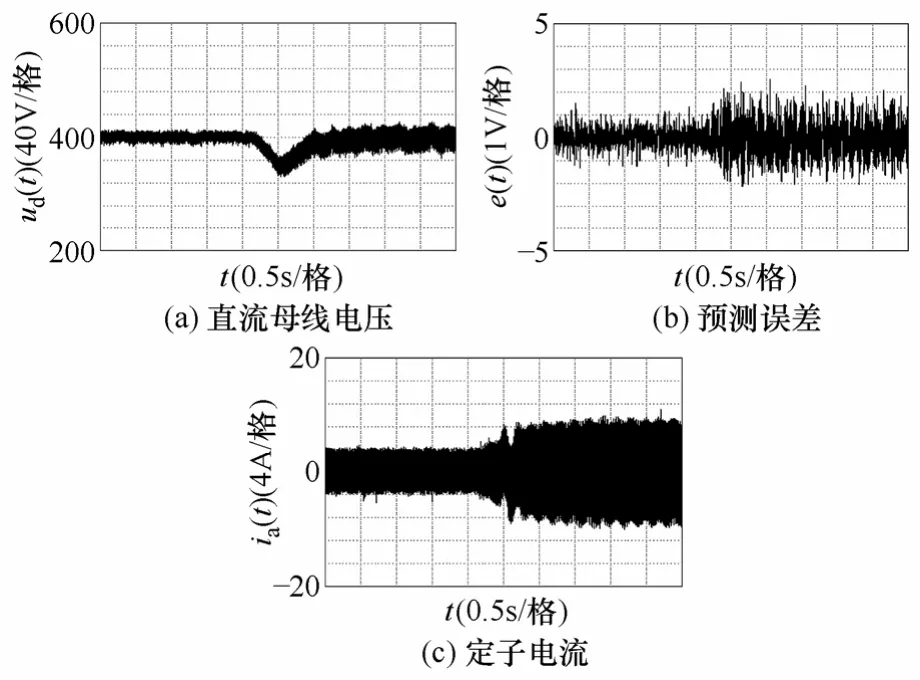
图14 母线电压动态跌落降低后的负载突加过程Fig.14 Load switching-on process with reduced dynamic drop of DC link
图12中,负载突卸过程并未造成拍频电流的显著增加。对该现象的解释是:母线电压的脉动成分正比于逆变器输出有功功率,由于负载突卸过程使得母线电压中的100Hz脉动成分减少,预测误差因而也相应减小。当负载突加时,图13显示出拍频成分在这一过程中稍有增加。这一现象可归因于负载突加过程使得母线电压脉动成分及预测误差均有增加。不过,拍频电流在2~3个母线脉动周期后便回归稳态值。
事实上,图13中母线电压的动态跌落已较为严重(约50V,占母线电压直流成分的12.5%)。设计者只需对整流侧闭环带宽稍作提升或对控制器增加负载电流前馈,将母线电压的跌落控制在40V(占母线电压直流分量的10%)以内并非难事。对应的负载突加过程如图14所示,此时,动态过程中的拍频成分未显著增大。
6 结论
本文提出了一种针对牵引变流器母线电压脉动的补偿方法,该方法利用重复预测算法对脉动的母线电压进行精确预测,稳态时可实现极高的预测精度。之后,再应用面积等效法计算逆变侧的脉冲宽度,即可实现对电机定子侧拍频电流的理想抑制。配合母线电压前馈,可将动态过程中的预测误差控制在合理的水平。
实验结果表明,本方案可显著抑制牵引电动机定子侧的拍频电流。当负载突加过程导致母线电压重度跌落时,拍频电流短暂增大;将母线电压跌落维持在合理的范围后,该现象消失。综合稳态和动态实验结果,显示出该重复预测方案相对于传统前馈方案的巨大优势,完全工程化后可淘汰当前业界主流的LC谐振滤波环节。
对于直流母线存在重复性低频脉动的交-直-交功率变换装置(如不控整流器供电的交流电动机调速器),本方案具有普遍的实用价值。
[1] Salam Z, Goodman C J. Compensation of fluctuating DC link voltage for traction inverter drive[C].Proceedings of the 6th International Conference on Power Electronics and Variable Speed Drives,Nottingham, UK, 1996: 390-395.
[2] Cheok A, Kawamoto S, Matsumoto T, et al. AC drive with particular reference to traction drives[C].Proceedings of the 4th International Conference on Advances in Power System Control, Operation and Management, Hong Kong, China, 1997, 1: 348-353.
[3] Enjeti P N, Shireen W. A new technique to reject DC-link voltage ripple for inverters operating on programmed PWM waveforms[J]. IEEE Transactions on Power Electronics, 1992, 7(2): 171-180.
[4] Flourentzou N, Agelidis V G. Harmonic performance of multiple sets of solutions of SHE-PWM for a 2-level VSC topology with fluctuating DC-link voltage[C]. Proceedings of Australasian Universities Power Engineering Conference, Perth, Australia,2007: 1-8.
[5] Klima J. Analytical investigation of influence of DC-link voltage ripple on PWM VSI fed induction motor drive[C]. Proceedings of the 1st IEEE Conference on Industrial Electronics and Applications,Singapore, 2006: 1-7.
[6] Filizadeh S, Gole A M. Harmonic performance analysis of an OPWM-controlled STATCOM in network applications[J]. IEEE Transactions on Power Delivery, 2005, 20(2): 1001-1008.
[7] Dahler P, Knapp G, Nold A. New generation of compact low voltage IGBT converter for traction applications[C]. Proceedings of European Conference on Power Electronics and Applications, Dresden,Germany, 2005: 1-9.
[8] Xue Y S, Chang L C. Closed-loop SPWM control for grid-connected buck-boost inverters[C]. Proceedings of IEEE 35th Annual Power Electronics Specialists Conference, Aachen, Germany, 2004, 5: 3366-3371.
[9] Filho M E, Gazoli J R, Filho A J S, et al. A control method for voltage source inverter without DC link capacitor[C]. Proceedings of IEEE 39th Annual Power Electronics Specialists Conference, Rhodes,Greece, 2008: 4432-4437.
[10] Enjeti P, Shireen W. An advanced programmed PWM modulator for inverters which simultaneously eliminates harmonics and rejects DC link voltage ripple[C]. Proceedings of IEEE 5th Annual Applied Power Electronics Conference and Exposition, Los Angeles, USA, 1990: 681-685.
[11] Kang Y, Chen L L. A voltage-mode controlled high-input-power-factor AC line conditioner with minimized output voltage harmonics[C]. Proceedings of IEEE 25th Annual Power Electronics Specialists Conference, Taipei, China, 1994, 1:369-374.
[12] Lee J Y, Sun Y Y. Adaptive harmonic control in PWM inverters with fluctuating input voltage[J].IEEE Transactions on Industrial Electronics, 1986,33(1): 92-98.
[13] Hadji S, Touhami O, Goodman C J.Vector-optimised harmonic elimination for single-phase pulse-width modulation inverters/converters[J]. IEE Transactions on Electric Power Applications, 2007, 1(3): 423-432.
[14] Funabiki S, Sawada Y. A computative decision of pulse width in three-phase PWM inverter[C].Proceedings of IEEE 23rd Industry Applications Society Annual Meeting, Pittsburgh, USA, 1988, 1:694-699.
[15] Chen Y M, Hsieh C H, Cheng Y M. Modified SPWM control schemes for three-phase inverters[C].Proceedings of IEEE 4th International Conference on Power Electronics and Drive Systems, Indonesia,2001, 2: 651-656.
[16] Samir K, Pablo L, Mauricio A, et al. Multicarrier PWM with dc-link ripple feedforward compensation for multilevel inverters[J]. IEEE Transactions on Power Electronics, 2008, 23(1): 52-59.
[17] Haneyoshi T, Kawamura A, Hoft R G. Waveform compensation of PWM inverter with cyclic fluctuating loads[J]. IEEE Transactions on Industry Applications, 1988, 24(3): 582-589.
[18] Zhou K L, Wang D W, Zhang B, et al. Plug-in dual-mode-structure repetitive controller for CVCF PWM inverters[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 784-791.
[19] Wu X H, Panda S K, Xu J X. DC link voltage and supply-side current harmonics minimization of three phase PWM boost rectifiers using frequency domain based repetitive current controllers[J]. IEEE Transactions on Power Electronics, 2008, 23(4):1987-1997.
[20] Zhang K, Kang Y, Xiong J, et al. Direct repetitive control of SPWM inverter for UPS purpose[J]. IEEE Transactions on Power Electronics, 2003, 18(3):784-792.
[21] Tzou Y Y, Ou R S, Jung S L, et al. High-performance programmable AC power source with low harmonic distortion using DSP-based repetitive control technique[J]. IEEE Transactions on Power Electronics,1997, 12(4): 715-725.
[22] Cao R Z, Low K S. A repetitive model predictive control approach for precision tracking of a linear motion system[J]. IEEE Transactions on Industrial Electronics, 2009, 56(6): 1955-1962.
[23] Zhang K, Kang Y, Xiong J, et al. Deadbeat control of PWM inverter with repetitive disturbance prediction[C]. Proceedings of IEEE 14th Annual Applied Power Electronics Conference and Exposition, Dallas, USA, 1999, 2: 1026-1031.
猜你喜欢
中国特种设备安全(2022年3期)2022-07-08
河北大学学报(自然科学版)(2022年3期)2022-06-16
辽宁工业大学学报(自然科学版)(2020年1期)2020-01-07
微型小说选刊(2016年6期)2016-12-08
电测与仪表(2015年4期)2015-04-12
电测与仪表(2015年5期)2015-04-09
舰船科学技术(2015年8期)2015-02-27
中国惯性技术学报(2014年4期)2014-10-21
地震研究(2014年1期)2014-02-27
电机与控制应用(2013年9期)2013-11-21
