
人体运动捕捉仪的设计与实现
2011-10-17 01:15段世梅陈彦明
中国科技信息 2011年6期
段世梅 孙 倩 陈彦明
人体运动捕捉仪的设计与实现
段世梅 孙 倩 陈彦明
人体运动捕捉仪是一种用于准确测量运动物体在三维空间运动状况的设备。它通过排布在空间中的数个惯性传感器,将运动物体的运动数据实时上传至计算机并对该数据进行处理,得到驱动三维人体模型的数据,用该数据驱动建好的人体骨架模型,从而实现人体运动的再现。本系统选用惯性传感器为采集工具,以嵌入式操作系统为开发平台,实现了对人体运动的捕捉和再现。
惯性传感器;人体骨架;实时数据采集;运动捕捉
引言
随着计算机技术以及三维图像技术的迅速发展,精确捕捉人体动作并且进行重现,已经成为研究热点。获取训练中的人体动作,从不同的视角观察和监控人体动作,通过实时的运动捕捉技术对训练中出现的问题进行技术诊断与分析,并以视频和图像以及量化的数据等方式反馈出来,使得训练的纠正更加有的放矢,从而大大提高训练效率和效果,使驾驶训练、体育训练等摆脱纯粹的依靠经验的状态,进入科学化、数字化的时代。因此,人体运动捕捉在驾驶训练等方面有广泛的应用前景。目前,常用的运动捕捉技术从原理上说可分为机械式、声学式、电磁式和光学式。声学式传感器成本较低,但对运动的捕捉有较大延迟和滞后,实时性较差,精度一般不很高。光学式运动捕捉通过对目标上特定光点的监视和跟踪来完成运动捕捉的任务,缺点是系统价格昂贵,虽然它可以实时捕捉运动,但后处理的工作量较大。电磁式传感器装置的定标比较简单,技术较成熟,成本相对低廉。它的缺点在于对环境要求严格,在表演场地附近不能有金属物品,否则会造成电磁场畸变,影响精度。惯性传感器成本较低,解算方便,故在本系统中选用。
1 模型的建立
由于人体关节点之间的部分在任何时刻都不会形变,可以用刚体来代表它们。同时我们假设各个线段(即人体骨架)之间的长短比例关系并不因人而异,这一比例可以从解剖学中获得。因此,人体可以看成一个由关节点连接的刚体的集合。如上肢是由肘关节连接的上下臂两个刚体组成的,上臂与躯干是由肩关节连接的。以一条线段来表示一个刚体,将人体运动简化为人体骨架的运动,这样就得到了一个由16个人体关节点组成的三维人体骨架模型,如图1所示。根据简化出的三维人体骨架模型,将11个惯性传感器分别布置在左大臂、左小臂、右大臂、右小臂、左大腿、左小腿、右大腿、右小腿、头、背部和腰部等11个身体的部位。
2 系统工作原理及硬件组成
人体运动捕捉仪是一种用于准确测量人体在三维空间运动状况的设备。它的工作原理为,将数个惯性传感器捆绑在人体上,传感器实时捕捉人体骨骼的运动数据,数据采集软件(运行于嵌入式操作平台上)对11个传感器的运动数据进行实时采集,并将采集到数据打包后通过以太网实时发送到人体运动PC机上。人体运动显示软件(运行于人体运动PC机上)通过以太网接收人体运动数据,通过处理,驱动三维人体模型,从而实现人体运动的再现。
人体运动捕捉仪由肢体运动传感器、嵌入式开发平台、人体运动PC机等部分组成,结构框图如图2所示。

图2 人体运动捕捉仪硬件结构框图

图3 人体运动捕捉仪软件结构框图

图1 人体三维骨架模型
3 软件设计及实现
人体运动捕捉仪的软件部分主要包括数据采集软件和人体运动显示软件,结构框图如图3所示。
a)数据采集软件
数据采集软件是采用嵌入式操作系统的实时多任务软件,实现各通道数据的采集、整理和发送,软件具有快速启动、灵活配置等功能。主要由嵌入式操作系统、I/O设备驱动程序、配置模块、初始化模块、系统状态处理任务、串口通道采集任务、数据发送任务等任务和功能模块组成。数据采集软件工作流程见图4。

图4 数据采集软件工作流程
b)人体运动显示软件
人体运动显示软件通过以太网,实时接收数据采集软件发送的数据包,进行实时存储,并对前端传感器的运行状态进行监控,用实时接收来的数据,驱动人体三维模型,完成人体动作的再现,也可以根据存储的数据,进行回放分析。
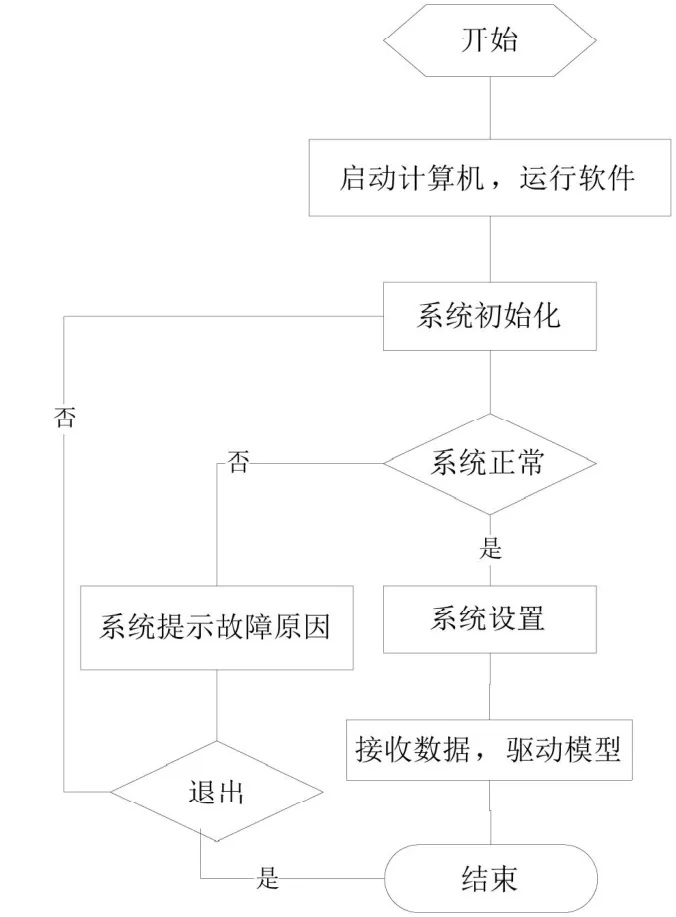
图5 人体运动显示软件运行流程图
4 实验及结论
在人体运动捕捉实验中,惯性传感器安装在人体骨骼的关键点上,如图6所示。对日常生活中人的站立、行走等基本动作进行了实验。图7为实验中人体传感器的安装效果图。在该实验中,惯性传感器捆绑在人体上,实时采集人体的运动数据,经嵌入式操作平台打包发送给人体运动PC机,PC机对数据进行剔除野点等处理,用处理过的数据驱动三维人体模型,取得了良好的复现效果。图8为人站立动作的再现视图,图9为人行走的基本动作在三维视图中的再现。
5 结束语
本文通过选用惯性传感器为工具,以嵌入式操作系统为开发平台,对日常生活中人的常见动作进行精确捕捉,并在PC机上进行动作再现。实验表明,这种方法成本较低,解算方便,实时性好,已经应用到飞行员的驾驶训练当中。在进行飞行员的驾驶训练时,传统方法是依靠经验纠正飞行员的动作。通过人体运动捕捉仪,能对训练中出现的问题及时进行诊断与分析,使得训练动作的纠正更加有的放矢,从而大大提高训练效率和效果。

图6 模型传感器安装效果图

图7 人体传感器安装效果图

图8 站立视图
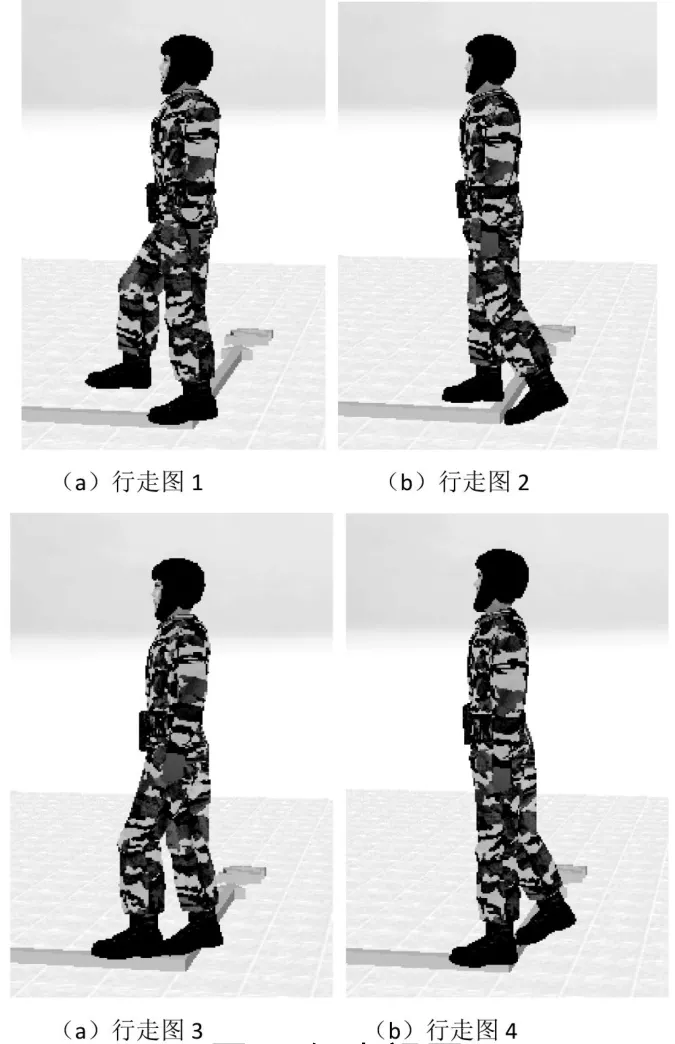
图9 行走视图
[1]朱登明,王兆其,石敏,黄河.一种基于逆运动学的三维虚拟人体运动生成方法.2008
[2]肖 俊, 庄越挺, 吴 飞.三维人体运动特征可视化与交互式运动分割.软件学报.2008
[3]庄越挺,刘小明,潘云鹤,杨骏.运动图像序列的人体三维运动骨架重建.2007
10.3969/j.issn.1001-8972.2011.06.010
段世梅(1984),女,硕士,软件工程师,主要从事飞行仿真技术研究。
猜你喜欢
电子乐园·上旬刊(2022年5期)2022-04-09
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
中国新技术新产品(2020年5期)2020-05-06
制造技术与机床(2017年9期)2017-11-27
中学生数理化·八年级物理人教版(2017年3期)2017-11-09
农业工程技术·温室园艺(2017年3期)2017-07-13
电子制作(2017年23期)2017-02-02
数字技术与应用(2016年9期)2016-11-09
中国医学装备(2015年4期)2015-01-26
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
