
基于LabVIEW的物体目标跟踪系统设计
2011-11-04 01:14牛杰
常州信息职业技术学院学报 2011年2期
牛杰
(常州信息职业技术学院电子与电气工程学院江苏常州213164)
基于LabVIEW的物体目标跟踪系统设计
牛杰
(常州信息职业技术学院电子与电气工程学院江苏常州213164)
提出一种基于演化算法的模式匹配目标跟踪方法。传统的模式匹配算法大多采用遍历式搜索策略,因而计算量的降低有限。将演化算法引入匹配技术中,提出一种改进型图像匹配算法,并给出了基于LabVIEW软件的系统实现。实验结果表明该方法具有运算速度快、准确度高等特点。
LabVIEW;演化算法;物体跟踪
0 引言
视觉检测是计算机学科的一个重要分支,它综合了光学、机械、电子、计算机软硬件等方面的技术,涉及到计算机、图像处理、模式识别、人工智能、信号处理、光机电一体化等多个领域。自起步发展至今,已经有20多年的历史,其功能以及应用范围随着工业自动化的发展逐渐完善和推广。该技术一般是用模式匹配的方法,利用视觉手段获取被测物体图像与预先已知标准进行比较,从而确定物体状况。
由于实时获取的图像和预存图像通常是在不同的时间下获得的,并且在成像过程中存在噪声和几何畸变,致使由此获取的图像特征必然存在差异,因此,这就要求图像匹配算法具有智能适应这种复杂多变应用环境的能力,并具有一定的容错和抗干扰能力。此外,在保证最优匹配精度的前提下,大幅度降低图像匹配的计算量是人们关注的研究课题。图像匹配的计算量取决于它寻找最佳匹配位置时采用的搜索策略。传统的方法大多采用遍历式搜索策略,因而计算量的降低有限。
演化算法是模拟自然界的进化过程,为了解决复杂问题而提出一类智能算法,演化算法将生物进化的原理与最优化的技术和计算机技术结合起来,创造了一种全新的优化设计方法,它具有自组织、自诊断、自修复等特点,同时还具有良好的并行性、全局优化性与稳健性等特点。因此演化算法具有非常广泛的应用前景与重要的研究价值。本文中将演化算法引入匹配技术中,提出了一种基于改进型演化算法的图像相关匹配方法。实验表明该方法具有运算速度快、正确匹配率高等特点。
1 模板匹配法相关概念
系统结构模板匹配方法就是计算一个固定的目标模式和一个未知图像块的相异程度,用一个阀值决定输出。模板匹配可以用来确认一幅图中是否存在某种已知模板图像。传统匹配算法一般采取直接利用原始图像像素值进行匹配。该方法可充分利用图像的所有信息来区分不同对象,但处理的信息量很大,计算复杂度高。这类算法的特点是对图像之间的微小差别非常敏感。一个细微的变化就会对匹配算法的计算结果产生很大的影响,有可能导致匹配失败。所以这种算法抗噪声、抗干扰能力较差,适用于两幅图像具有相同外界条件的情况下作精细的匹配。
随着图像匹配技术的发展和完善,现代的匹配技术已经能够比较智能地完成匹配和定位功能,因而图像匹配技术在各个领域的应用范围越来越广泛。尤其是在一些无人干预的情况下自动完成任务的环境中,图像匹配作为定位和识别的核心作用显得更为重要。
2 基于演化的相关图像匹配算法
相关图像匹配算法是目前图像匹配中应用最广泛的一种方法。它具有很强的噪声抑制能力,且计算简单,易于编程和硬件化。在预先给定目标模板的情况下,相关匹配算法是十分实用的。该方法利用模板,在被搜索图像中寻找目标。设模板T的尺寸为K×L,搜索图像尺寸为M×N,将T叠放在搜索图像上平移,模板覆盖下的那块搜索子图记为S(i,j),(i,j)为这块子图的左上角像点在搜索图中的坐标。因此,有1≤i≤M-K+1,1≤j≤N-L+1,比较T和S(i,j),寻找与T一致的S(i,j)。若两者一致,表示匹配。
演化算法是由适应度函数指导优化过程的随机化搜索算法,将其引入相关定位过程,使相关匹配由逐点移动模板进行相关运算变为随机取点进行相关运算,并通过演化算法的演化功能由适当的适应度函数指导其搜索过程向最优点进化,这样可以大大减少运算量。
2.1 编码及适应度函数选择
个体的编码图像相关匹配是求出目标所在的位置坐标(i,j),而位置坐标都是自然数,因此拟选择自然数编码。
适应度是衡量个体适应自然的能力,以及区分群体中个体优差的唯一标准。改变群体中个体的结构是通过改变它的适应度来实现的,因此选择好的适应度函数至关重要。本算法使用了和文献[3]相同的适应度函数:
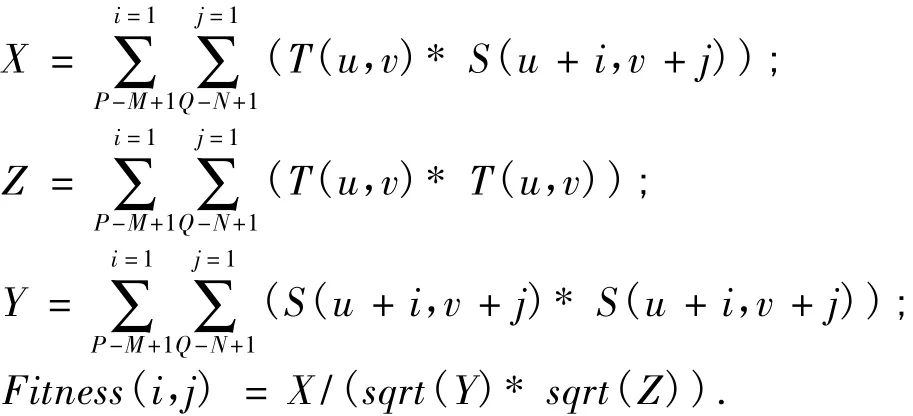
其中T(u,v)为模板图像所表示的灰度矩阵,个体在原图对应位置处的灰度矩阵为S(u+i,v+j)。停机条件是算法实际演化的代数超过预定的演化代数Maxgenerations时或者已经找到了最优解即abs (fitness-1.0)<0.000 001,则停机。
2.2 算法步骤及框架
演化算法求解图像匹配问题主要包括以下几步:
①个体的编码,以及初始化种群;
②计算每个个体的适应值;
③判断个体的适应值是否满足停机条件;
④不满足停机条件就执行遗传算子,选择部分个体执行杂交操作与变异操作;
⑤执行杂交与变异操作得到新的个体,再判断新个体是否满足停机条件,如果满足就停机,否则转到第4步;
⑥结束,确定匹配点。
基于演化的相关匹配算法的框架如图1所示。
3 改进型演化算法
演化算法能够很好地检测和跟踪目标,但是在匹配图像时,根据模板以及基准图的大小,种群的规模基本确定。在模板对比过程中,依然需要消耗一定的时间。本文采用演化算法进行目标匹配,并对该算法进行改进以提高运算速度。具体步骤如下:
1)利用帧差法确定序列图像中是否存在目标,不存在目标的图像无需进行检测。

图1 图像匹配算法框架
2)初始搜索点的选择。在序列图像的连续帧中目标的运动方向基本是一致的,根据目标在前几帧图像中的位置和运动方向预测它在下一帧图像会可能出现的位置,改变初始搜索点进行模板匹配,减少在非匹配点作无用功。
3)多分辨率图像匹配。采用较低的分辨率来降低原始图像的尺寸,可以使用不同的因子对原图像进行二次采样,将原图像表示为多种分辨率的格式。若对原图像二次采样使用的因子是2,因为图像的行列都被减少一半,整个图像尺寸因而减小为原来的1/4。在对目标进行跟踪时,在较低的分辨率(信息量较小)上进行匹配,当不满足检测条件时,才返回到分辨率较高的图像中继续跟踪。
4 系统实现及结果分析
4.1 图像抓取与采集
系统采用NI公司的LabVIEW软件进行实验开发。图像抓取采集在NI集成了USB摄像头驱动后变得比较容易。图2给出了采集图像的程序框图。首先利用IMAQdx Open Camera VI打开摄像头,然后利用IMAQdx Open Camera VI配置摄像头数据,在Snap VI中完成图像采集,最后释放摄像头资源。
4.2 模板确定与模板匹配
在图像采集完成后,利用鼠标动态标定待测模板后实现模板的算法学习。然后调用模板及图像送入新型演化算法开始动态跟踪识别。匹配信息生成后,系统调用IMAQ Match Geometric Pattern 2模块,在该模块调用后将识别出的物体高亮显示。图3是模式匹配与运动识别的部分程序。图4~图6是模式匹配识别实验结果。
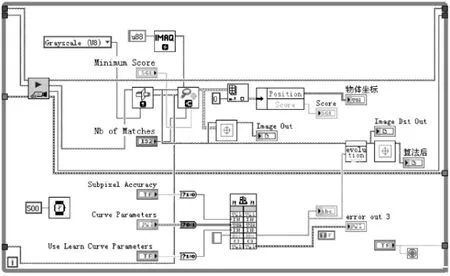
图3 模式匹配识别部分程序框图
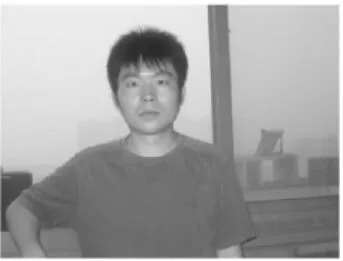
图4 基准图
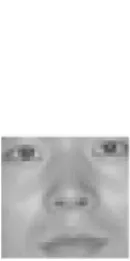
图5 模板图

图6 最终匹配结果
4.3 结果分析
实验均为在Intel双核2.10GHz PC机上对摄像头拍摄的320×240图像分辨率图像检测所得。实验时模拟仿真上述匹配算法的同时,与演化算法和相关图像匹配算法的运行结果进行了对比,比较结果如表1所示。从表1可知,本文匹配算法的平均运行时间比传统演化匹配算法提高了42.5%,匹配精确率也达到了令人满意的水平。本文匹配算法的平均运行时间比相关图像匹配算法提高了90.4%,匹配精确性高了8个百分点。这些数据说明了本文算法在综合快速性和全局收敛性两方面均表现出了以上两种传统匹配算法无法比拟的优势。
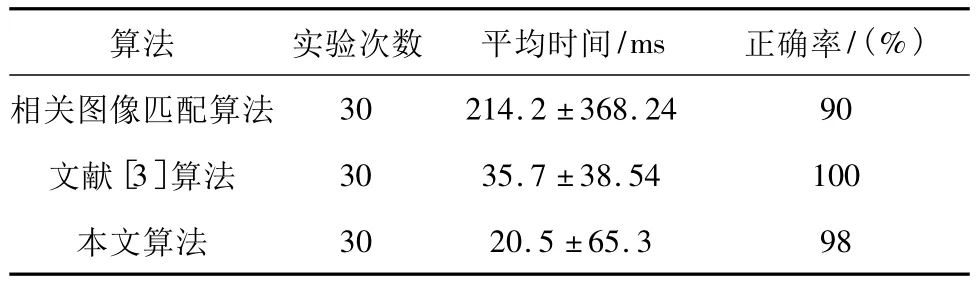
表1 匹配结果比较
5 结束语
本文提出了用演化算法来实现快速图像相关匹配,并对演化算法实现部分进行了部分改进,实验证明本文提出改进的演化算法要优于LabVIEW工具包算法以及传统的演化算法,具有一定的推广价值,可用于实时性要求较高的图像模板匹配。
[1]Siebel N T.Design and Implementation of People Tracking Algorithms for Visual Surveillance Applications[D]. PhD thesis,The University of Reading,Reading,UK,2003.
[2]Shao,X,Zhao H,Nakamura K,Katabira K,et al.Detection and Tracking of Multiple Pedestrians by Using Laser Range Scanners[C].Proc//Proc of IEEE International Conference on Intelligent Robots and Systems.San Diego,CA,USA,2007:2174-2179.
[3]杨俊,张玲霞,陈明.基于视觉检测的城市智能交通管理系统应用研究[J].测控技术,2003(2).
[4]Srinivasan P,Shi J B.Bottom-up recognition and parsing of the human body[C].IEEE Computer Society Conference on Computer Vision and Pattern Recognition.Minneapolis,USA,2007:1-8.
[5]Ren X,Berg AC,Malik J.Recovering human body configurations using pairwise constraints between parts[C]. IEEE International Conference on Computer Vision.Beijing,China,2005:824-831.
[6]朱红,赵亦,褚静.基于遗传算法的快速图像相关匹配[J].红外与毫米波学报,1999,18(2).
[7]鄢靖丰,张火林,杜彩月.基于改进演化算法的快速图像相关匹配[J].许昌学院学报,2008,27(5).
[8]汤中泽,张春燕,申传家,等.帧差法和Mean-shift相结合的运动目标自动检测与跟踪[J].科学技术与工程,2010(24).
Design of for Moving Objects Tracking System Based on LabVIEW
NIU Jie
(School of Electrical and Electronic Engineering,Changzhou College of Information Technology,Changzhou 213164,China)
The paper proposes a moving objects tracking method based on the evolutionary algorithm.The traditional method usually adopts the ergodic dyadic search strategy and the lessening calculating quantity's is limited.This paper introduces the evolutionary algorithm into the match technology,and describes a system with LabVIEW software measurement and control.The experimental results indicate that the method has the characteristics of high speed calculation,high degree of accuracy.
LabVIEW;evolutionary algorithm;moving objects tracking
TP 391.41
A
1672-2434(2011)02-0010-04
2010-12-21
牛杰(1983-),男,讲师,从事研究方向:测量控制、图像处理
猜你喜欢
现代仪器与医疗(2021年4期)2021-11-05
电子制作(2019年13期)2020-01-14
移动信息(2018年1期)2018-12-28
测控技术(2018年10期)2018-11-25
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
计算机测量与控制(2017年6期)2017-07-01
汽车维护与修理(2016年3期)2016-02-28
山东工业技术(2015年21期)2015-07-27
少先队活动(2014年6期)2015-03-18
西安建筑科技大学学报(自然科学版)(2014年5期)2014-11-10
