
螺旋桨负载永磁同步电机直接转矩控制系统研究
2012-01-25 07:43任俊杰刘彦呈赵友涛郭昊昊
电机与控制学报 2012年7期
任俊杰,刘彦呈,赵友涛,郭昊昊
(大连海事大学 轮机工程学院,辽宁 大连116026)
0 引言
随着电力电子技术、微型计算机和稀土永磁材料研制的突破性进展,使得大功率调速永磁同步电机(permanent magnet synchronous motor,PMSM)已广泛应用于船舶电力推进系统[1]。
产生于20世纪80代的直接转矩控制(direct torque control,DTC)理论起初被应用于异步电机的调速中[2-3],随后便应用于永磁同步电机变频调速系统[4-5],而 1995年由瑞士 ABB 公司研制的采用直接转矩控制的变频器已应用于船舶电力推进中。基于空间电压矢量调制策略的直接转矩控制可以有效减小转矩和磁链的脉动,因而被广泛应用于变频调速系统中[6-9]。文献[6-8]通过给定磁链与磁链位置角及需要增加的转矩角,确定出需要作用的给定磁链,然后采用空间电压矢量调制技术,利用相邻电压空间矢量和零电压矢量进行组合,实现转矩和磁链误差的精确补偿。文献[9]对基于磁链误差矢量补偿的直接转矩控制和传统DTC进行了比较研究。螺旋桨作为船舶电力推进系统中推进电机的负载,其旋转时所产生的负载转矩与推力的计算比较复杂,文献[10]对螺旋桨的敞水性能数值图谱进行了研究,得到船舶采用吊舱电力推进器中螺旋桨的敞水性能曲线,文献[11]对电力推进中螺旋桨负载特性方面进行了仿真研究,但没有结合整个变频调速系统进行分析。文献[12]采用传统DTC对电力推进船舶全电力系统进行了数字仿真,做了大量分析研究,但没有对螺旋桨负载特性进行分析研究,同时也未给出永磁推进电机的具体性能参数等,文献[13]采用矢量控制方案对舰船综合电力推进系统进行了仿真研究,在螺旋桨负载特性方面没有给出具体分析过程。
船舶螺旋桨的负载特性比较复杂,对其分析研究时,螺旋桨进速系数与扭矩系数、推力系数之间的函数关系显得较为重要。本文通过调研,计算并得到某船所采用的永磁推进电机及螺旋桨负载的相关参数,同时建立基于螺旋桨负载特性的直接转矩控制仿真模型,结合实际测试的电机运行数据,对仿真结果进行分析与研究。
1 基于空间矢量调制的直接转矩控制
匈牙利学者在19世纪80年代提出了空间矢量调制(space vector modulation,SVM)的原理,该方法将逆变器和交流电机视为一个整体,从电机的角度出发,使电机产生圆形旋转磁场。由于磁链的轨迹是靠不同的电压空间矢量相加得到的,而不同的电压空间矢量对应于不同的逆变器开关模式,所以通过选择逆变器的不同开关模式,可以使电机的实际磁链尽可能逼近理想磁链圆。在采用空间矢量调制的方法中,为了达到实时合成所需电压矢量的目的,在一个开关采样周期内作用在电机定子绕组上的电压矢量为6个工作电压矢量中相邻工作电压矢量和零矢量的最终合成矢量。该矢量为任意矢量,它是根据实时的磁链和转矩误差来确定,从而采用该方法的直接转矩控制可以有效减小磁链和转矩的脉动。
基于空间电压矢量调制的方法中关键在于如何计算出需要给定的参考电压矢量,其计算过程如下:

由表面贴入式永磁同步电机的转矩公式可知,电机转矩Te与定转子磁链间夹角δ之间存在着非线性的关系。同时转矩观测值Te与速度调节器输出的转矩给定值 Teref之间会存在误差 ΔTe,为了能补偿这个误差,定子磁链相位角需要增加Δ θ大小的角度。因此,转矩误差ΔTe可以通过一个PI调节器来预测磁链的相位角增量Δθ。有了该角度后,便可得到定子磁链的观测值ψs与参考矢量ψsref之间存在的矢量误差Δψs,之后经过电压空间矢量计算模型可以得到能够补偿该磁链矢量误差Δψs的定子给定参考电压矢量。定子磁链观测器的积分模型为

散化后可得

式中:

其中:ψsref为定子磁链参考矢量,ψs和θ为当前定子磁链观测矢量及相位角。则可根据需要计算出给定的参考电压矢量为

计算得到需要给定的定子电压参考矢量后,便可通过SVPWM算法得到驱动逆变器开关工作的触发脉冲信号,基于 SVM-DTC的系统框图如图1所示。

图1 基于SVM的直接转矩控制系统框图Fig.1 The SVM-DTC diagram
2 船用螺旋桨负载特性分析
2.1 螺旋桨与船体间相互作用的理论分析
螺旋桨在水中旋转时会产生推力,当该推力方向与船舶前进方向相同时,就推动船舶前进,同时螺旋桨在旋转时还会受到海水对其产生的阻力矩。因此,为了克服这一阻力矩从而使螺旋桨旋转起来,推进电机必须提供给螺旋桨电磁转矩。依据螺旋桨的工作原理。其旋转时产生的推力P和转矩TL可表示为

其中:ρ为海水密度(kg/m3),n为螺旋桨转速(r/s),Dp为螺旋桨直径(m),Kp和 Km分别为螺旋桨推力无因次系数和阻力矩无因次系数,它们都是进速比J的函数。假定螺旋桨相对于水的轴向前进速度称为螺旋桨的进速vp,而螺旋桨的进速比J为螺旋桨回转一周的轴向进程hp(vp=hpn)与螺旋桨直径Dp的比值,其表达式为

当进速比变化时,Kp和Km也随之发生变化,因此螺旋桨产生的推力P和阻力矩TL也在变化。在实际计算与分析中,关键是求得在不同的进速比J时所对应的Kp和Km,进而才能求出螺旋桨负载产生的负载转矩的大小。由式(10)可知,可通过vp来求解 J。
当考虑到船体作用后,螺旋桨的进速vp与船舶速度vs之间的关系式为

式中w为伴流系数,对于双桨船,其计算的经验公式为

其中CB为船舶的方形系数。
如仅考虑船舶的直线运动,由牛顿第二运动定律可知

式中:k为附水系数(一般取为1.05~1.15),Ms为船体质量(kg),vs船舶航速(m/s),P'考虑船体作用后螺旋桨产生的有效推力(N),R为船舶受到的阻力(N)。
当考虑到船体作用后,螺旋桨在船尾旋转时会引起船体产生附加阻力ΔP,螺旋桨发出的推力P,一部分克服船的阻力R,而另一部分则克服该附加阻力ΔP。即螺旋桨产生的总推力为

实际计算和分析中常用推力减额系数 t来表示附加阻力的大小,即

对于双桨船,计算推力减额系数 t的经验公式为

当船舶在稳定航速行进时,螺旋桨产生的有效推力与船舶所受的阻力相等,则综合考虑船体作用后螺旋桨产生的有效推力为

在船体运动的数学模型中,如何准确计算船体所受的阻力是比较困难的。在计算船体的阻力时,阻力可分为摩擦阻力和剩余阻力,具体的理论及计算过程可参见文献[14-16],这里不再详细介绍。
2.2 螺旋桨负载模型的建立
本文以中铁渤海铁路轮渡1号船舶为实例,建立该船螺旋桨负载的仿真模型。渡轮全长182.6 m,采用双桨,船舶方形系数CB=0.61,计算可得半流系数w=0.135 5,推力减额系数 t=0.154 85,螺旋桨直径 Dp为3.6 m,海水密度 ρ=1 025 kg/m3。表1所示为螺旋桨敞水特性曲线上不同进速比J所对应的 Kp和 Km的一些离散点[17]。
利用Origin7.5软件进行曲线拟合,得到Kp和Km分别与进速比J之间的函数关系为

文献[14]中给出了中铁渤海铁路轮渡1号船舶在某几个船速下船舶受到阻力的详细计算过程,计算结果如表2所示:其中R=Rf+Rr,Rf为船舶所受到的摩擦阻力,Rr为剩余阻力,则经曲线拟合得到船体阻力与船速Vs(kn)之间的函数关系为

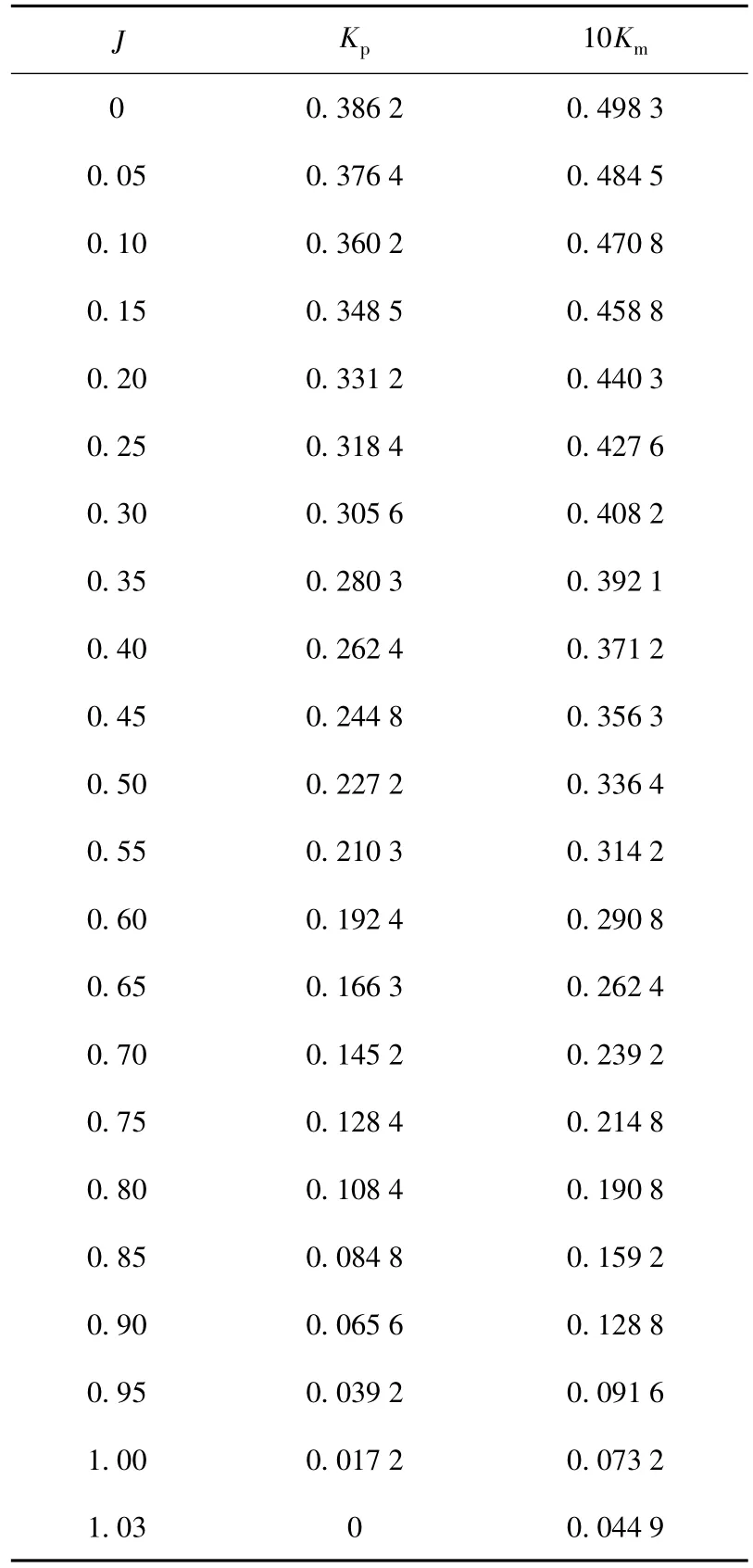
表1 螺旋桨敞水特性Table 1 The propeller open water characteristic

表2 烟大轮渡船舶阻力计算Table 2 Calculation the ship resistance of Yantai-Dalian Train Ferry
图2为建立的螺旋桨负载模型的框图,其中输入为螺旋桨的转速n,输出为螺旋桨作为永磁同步电机的负载所产生的负载转矩TL。其中附水系数k取为1.08,船舶质量 Ms为15 527 000 kg。

图2 螺旋桨负载特性模型图Fig.2 The load characteristics model diagram of the propeller
3 仿真及实验结果分析
本文采用Matlab/SIMULINK工具箱对基于螺旋桨负载特性的船用大功率永磁同步电机SVM-DTC进行了仿真研究。仿真中采用的永磁同步电机参数为:额定功率 4 088 kW,额定电压660 V,额定电流4 348 A,额定转速200 r/min,额定转矩195 200 N·m,转子永磁体磁链3.55 Wb,定子电阻1.502 mΩ,电机极对数为8,直轴电感0.23 mH,交轴电感0.48 mH。
通过对中铁渤海铁路轮渡1号船进行调研,记录了该船舶永磁推进电机实际运行中的数据,如表3所示。

表3 烟大轮渡变频调速系统中推进电机实测数据Table 3 The measured propulsion motor datas in variable frequency speed regulation system of Yantai-Dalian train ferry
1)对螺旋桨负载模型进行仿真分析,仿真时间3 000 s,在300 s时螺旋桨的给定转速由120 r/min变为145 r/min,之后分别在1 000 s、1 800 s和2 400 s时螺旋桨转速设定为 150 r/min、155 r/min和170 r/min。
由图3和图4可看出,当船舶的船速稳定后,进速比J达到一稳定值,螺旋桨产生的负载转矩也趋于稳定。当螺旋桨的给定转速变化时,J有一个减小的趋势,当船速再次稳定后,进速比又将回到原先的稳定值上,在此过程中螺旋桨产生的负载转矩有一突变,随后稳定在与螺旋桨转速相对应的转矩值上。

图3 螺旋桨负载转矩曲线Fig.3 Propeller Load Torque curve

图4 进速比仿真曲线Fig.4 Simulation curve of J
从图5可知,仿真得到的螺旋桨各转速下的负载转矩值与实测电机运行时的转矩值有一定误差,主要是由于仿真中采用的螺旋桨敞水特性曲线与实际船舶上螺旋桨的敞水特性曲线有些许误差,同一进速比J所对应的螺旋桨转矩无因次系数Km小于实际值,从而造成仿真得到的转矩值小于实测值。同时所建立的仿真模型只考虑了船舶的直线运动,而实际船舶在海面上的运动是很复杂的,进而会造成这些误差。但从仿真结果可看出,仿真值还是能反应出螺旋桨转速变化时,负载转矩变化的趋势,更为重要的是当螺旋桨转速变化时,船速稳定后,进速比为相同的一个值,所对应的螺旋桨转矩无因次系数Km也将为同一值,从而可对螺旋桨的负载转矩模型进行简化。

图5 各转速下螺旋桨负载转矩曲线Fig.5 The propeller load torque curve in different speed
由以上分析可知,不管螺旋桨转速如何变化,只要当船舶船速达到稳定值后,螺旋桨所对应的转矩无因次系数Km将保持在某一定值附近。由式(9)可知,螺旋桨负载转矩可近似的与螺旋桨转速的平方成正比关系。即

其中:K为比例系数,n为螺旋桨转速(r/s)。由电机运行的实测数据可计算得到各转速下所对应的比例系数,如表4所示。

表4 各转速下的螺旋桨负载转矩比例系数Table 4 The propeller load torque proportional coefficient in different speed
经过非线性拟合得到n2与比例系数K之间的函数关系为

其中 x代表n2。
2)通过以上的分析和计算建立简化后的基于螺旋桨负载特性的大功率永磁同步电机直接转矩控制的仿真模型。仿真时间3 s,推进永磁同步电机的初始转速给定0 r/min,在1.8 s时转速由70 r/min变为145 r/min,随后在2.0 s时转速变为150 r/min,2.2 s转速给定155 r/min,最后在2.6 s时转速给定为170 r/min。
由图6可知,电机转速的动态响应比较快,在很短时间内便达到给定转速值。同时从图7可知,在电机加速阶段,电磁转矩有一较大值,用以完成电机的加速过程,随着电机转速的稳定,该转矩也趋于稳定值,该值与图8中所示的螺旋桨旋转时产生的负载转矩相等。图9所示为电机三相电流曲线,图10为电机定子磁链的轨迹图,在整个仿真过程中,该圆形轨迹一直保持不变。

图6 电机转速曲线Fig.6 Motor speed curve

图7 电机转矩曲线Fig.7 Motor torque curve
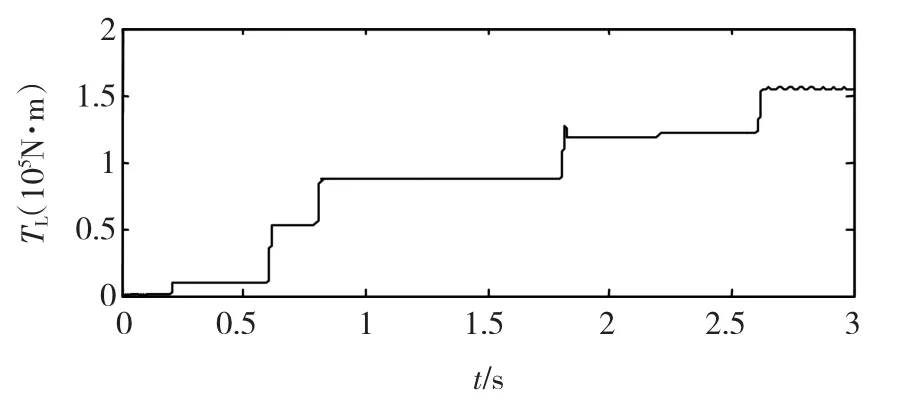
图8 螺旋桨负载转矩曲线Fig.8 Propeller load torque curve

图9 电机电流曲线Fig.9 Motor current curve

图10 电机磁链圆轨迹Fig.10 Motor flux track curve
图11 和图12所示为各转速下对应的电机转矩和电流曲线的局部放大图。从图中可知,仿真得到的电机转矩值与实测电机转矩值相一致。
表5所示为仿真得到的电机三相电流有效值与实测值之间的比较结果,比较结果可看出仿真得到的电机电流值比实测数据较小,主要是由于仿真中对电机模型做了一些理想化处理,忽略了电机漏感及其磁滞损耗,同时也未考虑机械摩擦等因素造成的影响,所以仿真得到的电流值小于实测值,但仿真结果还是能反映出电机三相电流值随转速的变化趋势。

图11 各转速下的转矩曲线Fig.11 The torque curve in different speed

图12 各转速下的电流曲线Fig.12 The current curve in different speed

表5 电流仿真与实测数据比较Table 5 Comparing simulation current results with experiment data
通过对图12中仿真电流波形周期及频率的计算,再结合各转速实际所对应的电流频率值,结果如表6所示,通过计算可知,仿真中得到的三相电流的周期及频率值与实际转速下所对应的电流频率值相一致,也进一步说明仿真结果在实际工程应用方面具有一定的指导意义。

表6 仿真电流频率与实际频率比较Table 6 Comparing simulation current frequency with actual frequency
4 结语
本文对采用直接转矩控制的船用大功率永磁同步电机变频调速系统进行了研究,建立了基于船用螺旋桨负载特性的SVM-DTC仿真模型。通过仿真结果与实际船舶运行数据的比较可知:仿真结果能较准确的反映出电机工况变化时所对应的电机电磁转矩和电流值的变化趋势,在实际工程中具有一定的应用价值。尤其是对于船舶电力推进这一特殊系统,设计初始阶段要进行大量的试验,这不但增加了成本而且每次试验过程也比较繁琐。同时有的系统试验可能具有破坏性和危险性,如能较为准确的建立可反映实际工况的仿真模型,通过仿真试验得出的仿真结果在实际工程应用中将具有一定的指导意义。
[1]李崇坚.交流同步电机调速系统[M].北京:科学出版社,2006:288-292.
[2]DEPENBROCK M.Direct self-control(DSC)of inverter-fed induction machine[J].IEEE Transactions on Power Electronics,1988,3(4):420 -429.
[3]TAKAHASHI I,NOGUCHI T.A new quick-response and high-efficiency control strategy of induction motor[J].IEEE Transactions on Industry Applications,1986,22(5):820 -827.
[4]ZHONG Limin,RAHMAN M F,HU YUWEN,et al.Analysis of direct torque control in permanent magnet synchronous motor drives[J].IEEE Transactions on Power Electronics,1997,12(3):528-536.
[5]田淳,胡育文.永磁同步电机直接转矩控制系统理论及控制方案的研究[J].电工技术学报,2002,17(1):7-11.TIAN Chun,HU Yuwen.Study of the scheme and theory of the direct torque control in permanent magnet synchronous motor drives[J].Transactions of China Electrotechnical Society,2002,17(1):7-11.
[6]王斌,王跃,王兆安.空间矢量调制的永磁同步电机直接转矩控制[J].电机与控制学报,2010,14(6):45-50.WANG Bin,WANG Yue,WANG Zhaoan.Direct to-rque control of permanent magnet synchronous motor drives using space vector modulation[J].Electric Machines and Control,2010,14(6):45-50.
[7]TANG Lixin,ZHONG Limin,RAHMAN M F,et al.A novel direct controlled interior permanent magnet synchronous machine drive with low ripple in flux and torque and fixed switching frequency[J].IEEE Transactions on Power Electronics,2004,19(2):346-354.
[8]孙丹,贺益康.基于恒定开关频率空间矢量调制的永磁同步电机直接转矩控制[J].中国电机工程学报,2005,25(12):112-116.SUN Dan,HE Yikang.Space vector modulated based constant switching frequency direct torque control for permanent magnet synchronous motor[J].Proceedings of the CSEE,2005,25(12):112-116.
[9]史涔溦,邱建琪,金孟加,等.永磁同步电动机直接转矩控制方法的比较研究[J].中国电机工程学报,2005,25(16):141-146.SHI Cenwei,QIU Jianqi,JIN Mengjia,et al.Study on the performance of different direct torque control methods for permanent magnet synchronous machines[J].Proceedings of the CSEE,2005,25(16):141-146.
[10]于得会,王言英.吊舱推进器螺旋桨的敞水性能数值图谱[J].船海工程,2007,36(4):38 -42.YU Dehui,WANG Yanying.POD propulsor and the numerical chart of propeller of open water characteristics[J].Ship & Ocean Engineering,2007,36(4):38 -42.
[11]罗彬,陈辉,高海波.船舶电力推进系统中的螺旋桨负载特性仿真[J].广州航海高等专科学校学报,2009,17(1):13-17.LUO Bin,CHEN Hui,GAO Haibo.Propeller load characteristics simulation in marine electrical system[J].Journal of Guangzhou Maritime College,2009,17(1):13 -17.
[12]王淼,戴剑锋,周双喜,等.全电力推进船舶电力系统的数字仿真[J]电工技术学报,2006,21(4):62 -66.WANG Miao,DAI Jianfeng,ZHOU Shuangxi,et al.Digital simulation of ship power system with electric propulsion[J].Transactions of China Electrotechnical Society,2006,21(4):62 -66.
[13]周德佳,王善铭,柴建云.基于Matlab-Simulink的舰船综合电力推进系统仿真[J].清华大学学报:自然科学版,2006,46(4):460-464.ZHOU Dejia,WANG Shanming,CHAI Jianyun.Simulation of an integrated electrical ship propulsion system using Matlab-Simulink[J].Journal of Tsinghua University:Science&Technology,2006,46(4):460-464.
[14]林安平.船舶电力推进系统中 PMSM模糊矢量控制仿真研究[D].大连:大连海事大学轮机工程学院,2007:19-24.
[15]哈瓦尔特.船舶阻力与推进[M].黄鼎良,张忠业,译.大连:大连理工大学出版社,1989:53-68.
[16]伊绍琳.船舶阻力[M].北京:国防工业出版社,1985:37-43.
[17]张庆文.吊舱电力推进装置及其螺旋桨设计研究[D].大连:大连理工大学船舶与海洋结构物设计制造系,2005:70-76.
猜你喜欢
防爆电机(2020年6期)2020-12-14
光学精密工程(2016年3期)2016-11-07
电测与仪表(2016年10期)2016-04-12
汽车工程(2016年11期)2016-04-11
黑龙江工程学院学报(2015年5期)2015-12-04
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
大电机技术(2015年5期)2015-02-27
汽车工程(2014年7期)2014-10-11
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年11期)2014-04-04
