
基于Carsim的车辆制动防抱死过程分析
2012-03-13 11:40杜春臣张文广周孙锋
北京汽车 2012年3期
杜春臣,张文广,周孙锋
(长安大学 汽车学院,陕西西安 710054)
0 引 言
车辆制动性是汽车的主要性能之一,制动性能的好坏直接关系到道路交通安全。重大交通事故往往与制动距离太长,紧急制动时发生侧滑等情况有关,良好的制动性能是汽车安全行驶的重要保障。车辆制动性能不仅取决于较短的制动距离和较好的抗热衰退性,还要保证汽车的方向稳定性。即制动时汽车不发生跑偏、侧滑,以及不能失去转向能力。最理想的制动情况是任何车轮不抱死,前后车轮都处于滚动状态,这样可以确保最佳的制动效果。车轮制动防抱死装置(ABS)能有效地将制动器制动力调节到适应轮胎——地面所能提供的附着力,防止车轮在紧急制动过程中抱死,从而提高车辆的制动稳定性。
车辆的行驶过程是一个比较复杂的动态过程,每个车轮接触地面所提供的附着系数不尽相同,尤其是在冰雪道路等明显分离摩擦系数的路面。在传统的车辆制动防抱死仿真中,一般将 4轮模型简化为单一车轮模型来研究车轮的制动距离和滑移率,验证制动防抱死控制算法的可靠性,从而忽略了在分离摩擦系数的路面上,整车的行驶状态。文中通过 CarSim软件建立整车动力学模型(S函数),在Simulink环境中对车辆动力学模型进行制动防抱死控制,以分析ABS对于车辆整体制动性能的影响。
1 制动过程车轮运动特性
汽车在制动过程中,车轮发生打滑现象,主要是由于地面附着力满足不了车辆提供的制动压力。因此,要实现最佳制动压力的控制,必须了解地面附着系数和滑移率之间的关系,而且不同的路面条件有不同的附着系数。地面附着系数和滑移率之间的关系见图1。图1中纵向附着系数φB和横向附着系数 φS分别代表相对应滑移率下地面所能提供给车轮的最大纵向力和横向力。地面提供的纵向附着力使车辆减速,横向附着力防止车辆发生侧滑。
当纵向附着力和横向附着力达到最佳时,才可以获得最佳的制动效能。研究发现,将滑移率控制在10%~30%内,制动效果最好。因此,通常把 20%的滑移率称为理想滑移率或最佳滑移率。文中设计的仿真系统中滑移率控制范围为18%~22%。
ABS的基本控制原理是通过车载传感器监测车辆在制动过程中车轮的状态,通过电控单元(ECU)对轮速、车速、加减速度及滑移率等重要参数进行计算、分析、比较,根据这些参数使用阈值控制方法,对制动压力发出增压、保压或减压的控制指令,通过控制制动压力来控制汽车制动过程中的车轮运动状态,使车轮保持在最佳制动状态,达到获得最佳制动力的效果。
为达到仿真可行性与可信度的统一,利用CarSim软件建立整车4轮模型,在分离摩擦系数的条件下,通过控制每个车轮的制动压力,实现车辆4轮的防抱死,研究车辆在制动过程中的最佳制动性能。
2 CarSim整车模型
Carsim 是由美国机械仿真公司(the Mechanical Simulation Corporation,MSC)于1996年研发,面向特性的参数化建模车辆动力学仿真软件。主要用来模拟不同路面情况下汽车的制动、加速和转向盘调整,通过三维动画和曲线直观地分析汽车的各种响应。
Carsim软件结合了传统的车辆动力学与现代的多体动力学建模方法,将车辆进行抽象简化,如图2。主要包括1个车体部分,4个簧下质量部分,4个旋转车轮部分和1个发动机曲轴部分。通过传动系和制动系来确定对车轮的驱动和制动,通过转向系特性和悬架 K&C特性综合考虑车轮的转向运动,最终确定轮胎的运动量,进而用轮胎模型确定轮胎力。
车辆在低附着系数、分离摩擦系数等路面上行驶时突然制动,引起侧滑和甩尾是非常危险的工况。CarSim提供了精确的轮胎制动模型,可以对4个轮胎进行差动制动控制,如图3所示。差动制动也称主动制动控制(Active Braking Control)。它是根据需要对不同车轮施加不同的制动力来改变车辆的运动状态的一种主动控制方法。利用差动制动方式进行汽车稳定性控制,尤其是轮胎附着极限下的稳定性控制是最为合适的。
该界面定义了车辆制动系统的一些性能参数,具体包括:制动力矩曲线,制动压力分配比例曲线,流体动力学时间常数,流体传递滞后,ABS关闭和开启的滑移率门限值,ABS最低工作车速。
3 建立仿真模型
在CarSim中设置的车辆仿真参数如表1所示。
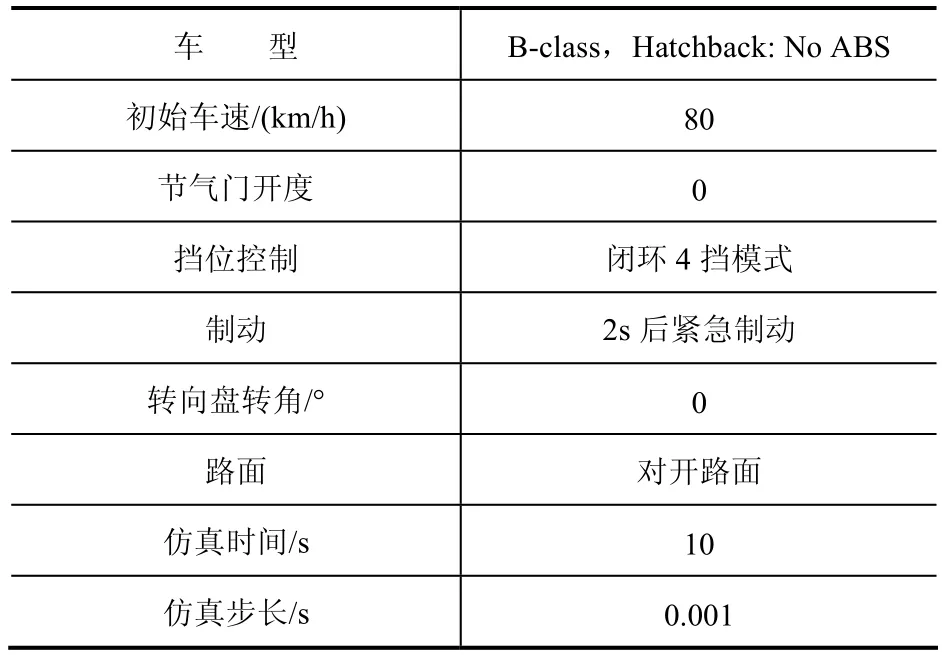
表1 车辆仿真参数
滑移率 s计算的准确性直接关系到整个仿真正确性,根据滑移率的定义公式:可知,车辆在制动过程中,需要通过车速、轮速来判断车轮状态,进而通过控制制动液压缸的压力来调节车轮运动状态。因此,在CarSim中建立整车模型后,将CarSim的输出变量依次定义为:Vx_L1(左前轮速/(km/h))、Vx_R1(右前轮速/(km/h))、Vx_L2(左后轮速/(km/h))、Vx_R2(右后轮速/(km/h))、Vx_SM(汽车质心处的速度/(km/h))、Pbk_Con(主缸压力的控制输入/MPa)。Simulink根据CarSim的输出信号,设置车辆ABS控制策略和仿真制动过程车轮运动状态,整体仿真模型如图 4所示。在制动过程中车轮接受液压缸的制动力矩,要防止车轮抱死,即要控制作用在车轮上的压力。因此,将 4个车轮的轮缸压力作为 CarSim的输入变量。其顺序依次为:IMP_PBK_L1(左前轮缸压力/MPa)、IMP_PBK_R1(右前轮缸压力/MPa)、IMP_PBK_L2(左后轮缸压力/MPa)、IMP_PBK_R2(右后轮缸压力/MPa)。
4 仿真结果
利用CarSim建立精确的4轮整车模型,通过Simulink设计控制策略,主要完成车轮防抱死系统在制动过程中对提高车辆制动性能的仿真。包括车轮侧滑角、车速与轮速、制动压力、车轮转角等参数。通过有无ABS两种情况的制动过程比较,验证了车轮防抱死对于提高车辆制动时稳定性的作用。具体图形曲线与结果分析如图 5~图8所示。
从以上各图可以看出,在分离摩擦系数的路面上,车辆开始制动时,无 ABS的车辆,车轮很快抱死,车轮侧滑角迅速变化,车辆开始出现侧滑现象。相反,在有 ABS防抱死的作用下,车轮压力变化缓慢,轮速始终围绕车速变化,即车轮没有发生抱死,达到最佳的制动性能,使车辆稳定地迅速制动。
5 结 论
通过CarSim和Simulink相结合的仿真方法,可以有效地模拟真实车辆的制动过程,比较真实地反映了ABS系统实际的工作情况。仿真分析表明,ABS不仅缩短车辆制动距离,而且对于车辆制动时的稳定性也有很大提高。从仿真动画中可以看到加装ABS的车辆在制动时向相邻车道有一定的偏移,这与仿真模型的精度、控制策略的效果,以及明显的分离摩擦系数路面有关。从整体来看,仿真结果具有实用性价值,为进一步研究汽车动力学性能提供了有效的手段。
[1]肖闯,黄江,易高. 基于 CarSim 的车辆稳定性控制仿真[J].专用汽车,2007, (6).
[2]李志魁. 基于CarSim的整车动力学建模与操纵稳定性仿真分析[D]. 吉林大学,2007.
[3]樊继东. 基于MATLAB的ABS控制仿真研究[J]. 湖北汽车工业学院,2010, (3).
[4]叶磊,尹作发. 基于Matlab/Simulink的车辆制动过程分析[J].公路与汽运,2006, (6).
[5]赵双,孙天建,康万新. 基于Simulink/Stateflow的汽车ABS混合建模与仿真[J]. 客车技术与研究,2006, (2).
[6]潘开广. 基于 MATLAB的汽车防抱死制动系统仿真研究[J].农业装备与车辆工程,2008, (8).
[7]于东. 汽车防抱死制动系统(ABS)控制方法仿真研究与控制器设计[D]. 山东大学,2007.
猜你喜欢
汽车实用技术(2022年13期)2022-07-19
承德石油高等专科学校学报(2022年2期)2022-05-18
数学大王·低年级(2021年2期)2021-02-21
中学生数理化·八年级物理人教版(2020年3期)2020-10-29
山东工业技术(2019年10期)2019-05-30
汽车观察(2019年2期)2019-03-15
小猕猴智力画刊(2018年7期)2018-08-08
科技创新与应用(2018年1期)2018-01-19
中小企业管理与科技·下旬刊(2016年12期)2017-01-17
消费者报道(2016年5期)2016-11-18
