无人机导引飞行设计与误差探讨*
2012-10-16 08:04尚其龙田春雨
舰船电子工程 2012年12期
石 风 尚其龙 田春雨
(1.东北电子技术研究所 锦州 121000)(2.总参第60研究所 南京 210016)
1 引言
目前,在电子技术和航空技术飞速发展的推动下,无人机的发展和应用受到了各国的重视。无人机可根据不同的任务搭载不同的设备,从而完成执行多种任务的需要。无人机执行任务时的首要环节就是其导引问题。
2 导引系统设计
无人直升机导引飞行就是无人直升机搭载光电吊舱,导引和控制无人直升机沿着设定的航道飞行,故采用电视寻的制导体制。
光电吊舱的功能是完成目标的搜索、捕获与跟踪,生成导引控制信号;无人直升机的飞控计算机利用导引控制信号,按照设定好的导引方法形成导引指令送往姿态控制系统,通过姿态控制系统控制无人直升机运动。
无人机导引控制策略有两种,一种是人在回路导引控制策略,另一种是光电吊舱自主控制策略两种。文中介绍的是光电吊舱自主导引控制策略。当无人机飞临目标区上空时便开始搜索目标,并将光电探测跟踪模拟器所拍摄的地面视频图像实时传回地面主控计算机上。光电吊舱锁定目标后,对目标进行持续跟踪并给出导引数据。飞控计算机接收并解算导引数据后利用舵机调整飞行姿态,实现无人机始终按光电探测跟踪模拟器所指方向飞行。实现过程如图1所示。
导引过程中,无人机平台上的姿态位置等信息通过数据链路传回地面站,操作人员对无人机的飞行状态进行监控,这种导引控制使人从控制者的角色转变为监视者,实现了无人机导引的自主控制[1]。
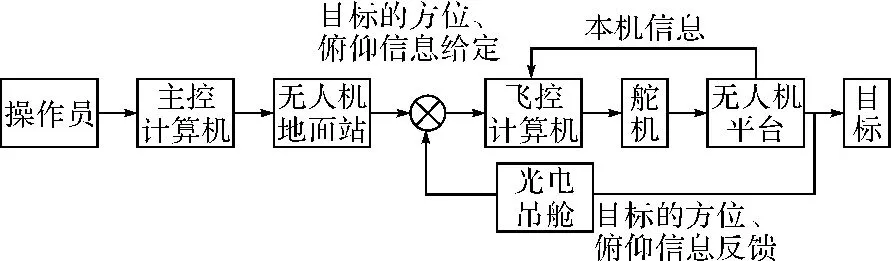
图1 导引控制过程框图
3 无人机导引模态设计
导引飞行的主要目的是实时跟踪目标,确定地面目标点相对于无人直升机光电吊舱的方位、俯仰角度信息。光电吊舱需提供给无人直升机的飞控计算机如下信号:
1)光电吊舱跟踪目标的俯仰角,相对平台轴线,向上为正;
2)光电吊舱跟踪目标的方位角,向右为正;
3)光电吊舱跟踪目标的俯仰角速度,向下为正;
4)光电吊舱跟踪目标的方位角速度,向右为正。
光电吊舱跟踪目标后可直接给出相对于目标的方位俯仰角信息,而光电吊舱的方位俯仰角速度信息不能直接给出。但是由于光电吊舱安装有陀螺稳定装置,可以保持视轴的稳定,并且在视轴稳定的基础上加入了跟踪控制回路,使得光电吊舱的视轴可以自动跟踪目标,因此可由光电吊舱的跟踪控制回路中引出视轴的角速度,即光电吊舱俯仰角速度和方位角速度[1]。在无人直升机飞行控制模态中增加导引模态。根据光电吊舱跟踪目标后输出的方位俯仰角进行设定。方位角和俯仰角分别设立最大设定值和最小设定值。当光电吊舱跟踪目标的俯仰角超过最大设定值后,导引模态失效,程序立即进入远航控制模态,即使重新工作在设定值内,飞行也不会自动进入导引模态。若光电吊舱跟踪目标的俯仰角小于最小设定值时,判断目标距离无人机较远,模态控制采用平飞远航,即高度保持、纵向速度控制、航向跟踪。当光电吊舱跟踪目标的俯仰角大于最小设定值时,目标距离无人机较近,模态控制采用俯冲飞行,即下降高度控制、纵向速度控制、航向跟踪。当光电吊舱跟踪目标的俯仰角大于最大设定值时,表明无人机距离目标的水平距离更近了,无人机降速逼近目标,纵向、侧向位置保持。

图2 导引控制框图
导引飞行过程中,光电吊舱俯仰角作为前飞速度控制的参考量,不直接参与控制。光电吊舱的方位角作为航向控制的设定值,直接参与控制计算。图2为导引控制框图。
4 导引模态软件设计
进入导引模态后,无人机的飞控计算机时刻监控光电吊舱的俯仰与方位信息,导引模态的入口为悬停模态,出口模态为远航模态。整个导引飞行模态主要分为以下几个过程:航向调节、导引执行、刹车、悬停等。航向调节过程主要是根据光电吊舱提供的方位角,无人机调整航向尽量对准目标位置,避免速度和航向都大幅度变化,使无人机航向与目标方位趋于一致;导引执行过程根据光电吊舱的俯仰角调节飞机的前飞速度和高度,使得更逼近目标点,根据光电吊舱的不同俯仰角调整前飞速度可分为中速、低速、最低速,当俯仰角很大时切换到刹车悬停过程,避免无人机前飞速度过大造成目标丢失;刹车过程是使无人机的前飞速度降为零;悬停过程是控制无人机悬停在目标点附近,并且在目标移动或其它情况造成目标相对直升机距离变远时,能切换到航向调节过程。导引模态软件流程图如图3所示。
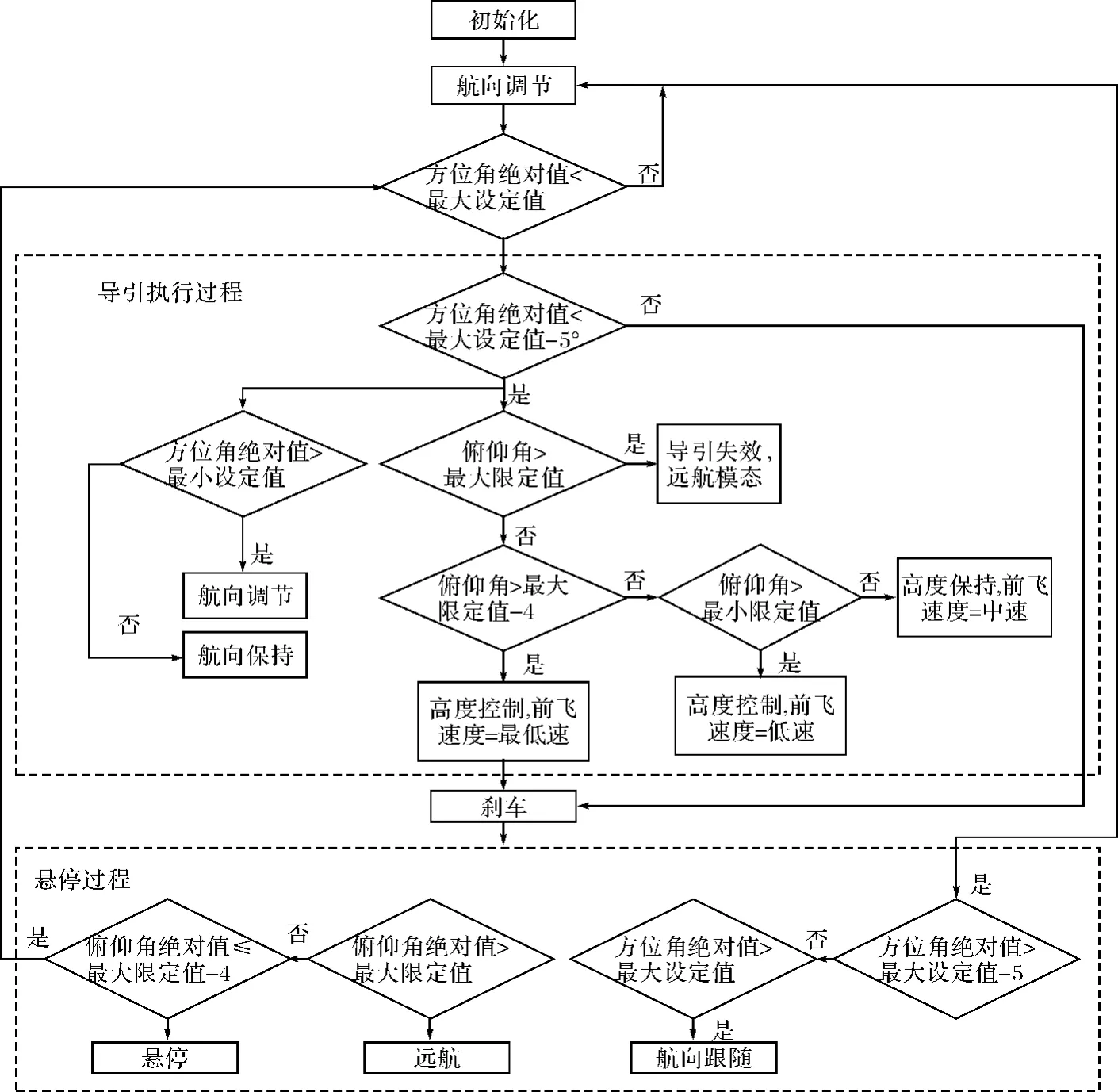
图3 导引模态软件流程图
软件设计中应注意的是:随着无人直升机逐渐逼近目标,水平相对距离减小,光电吊舱输出的俯仰角逐渐增大。当光电吊舱的俯仰角大于最大设定值后目标丢失,所以在程序中定义一个光电吊舱的俯仰角最大限定值,此最大限定值比导引模态控制中设定的最大设定值小;当光电吊舱的俯仰角大于最大限定值而未超过最大设定值时,进入刹车悬停过程;当光电吊舱的俯仰角比最大限定值小时,又能重新进入导引执行过程继续跟踪目标。
在航向跟踪控制过程中,航向指令

式中:Ψsp为无人机航向设定值;Ψpv为无人机航向测定值;Ψdy指无人机偏航速率。
当Ψdy=0°时,航向控制存在稳态误差,即Ψpv≠Ψsp。因此,在每个控制周期航向指令Ψsp都赋给了不同的值。在程序中设置一个死区,令|Ψdy|大于一定角度时,航向指令Ψsp=Ψpv+Ψdy。当无人直升机机头逐渐转向目标位置,|Ψdy|小于一定角度时,则保持上一时刻航向指令。
由于光电吊舱是安装在无人直升机上,它会随着机体姿态的变化而摆动,特别是俯仰角度。直升机姿态的变化会抵消部分光电吊舱跟踪目标输出的俯仰角。例如:当输出的俯仰角较小时,无人直升机俯仰姿态突然减小,引起导引俯仰角突变成负角度,示意图见图4;第二种情况是当输出的俯仰角变得较大时,此时无人直升机俯仰姿态突然变大,引起导引俯仰角突变,可能直接导致导引失效,示意图见图5。对于第一种情况,对光电吊舱影响不大,无人直升机继续前飞;第二种情况需要避免。

图4 下视角变小
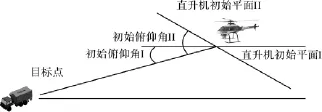
图5 下视角变大
5 误差探讨
整个导引飞行设计过程中,误差主要来自于两大方面。一是无人直升机自身的各种传感器精度误差及坐标系变换导致的误差;二是光电吊舱内部信号处理电路及结构框架的误差。
5.1 机体平台误差
无人直升机自身携带的传感器包括姿态陀螺、航向计、GPS接收机、气压传感器等。无人直升机飞行数据中输出的GPS定位精度为(CEP),横滚角输出精度为(1σ)、俯仰角输出精度为(1σ)[2]、偏航角输出精度为(1σ)。其中自身定位误差、横滚角测量误差和俯仰角测量误差、偏航角测量误差均服从正态分布。
无人直升机的飞控计算机将导引数据和无人机平台各种传感器数据融合处理,经过坐标转换形成导引指令控制导引飞行。坐标系转换过程如图6所示。
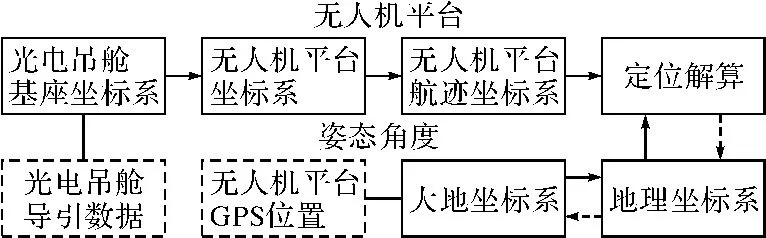
图6 数据及坐标系转换过程
因光电吊舱与无人机通过减震器相连结,所以在光电吊舱测量基座坐标系到无人机平台坐标系的变换时,需考虑安装误差。如无安装误差时,则两坐标系完全重合[3]。在光电吊舱的基座坐标系下得到跟踪目标的方位俯仰角转换到无人机平台坐标下。无人机平台的三轴姿态分别为横滚角、俯仰角和偏航角。由无人机平台坐标系到无人机平台航迹坐标系的转换时,定义上述三个角度的绕转次序依平台的姿态角变化特点、实际的机械构造结构、角度的正方向而定。在文中所述的应用背景中,各角正方向的定义分别为:俯仰角抬头为正,偏航角向右为正,横滚角右下为正[4]。
经过数次坐标转换,各阶段测量误差的累积结果是目标坐标测量误差近似服从正态分布[2],无人机的位置误差和姿态角误差对目标的导引精度影响较大。
5.2 光电吊舱误差
导引过程中,光电吊舱对目标进行跟踪时会产生跟踪误差。跟踪误差直接影响导引精度。跟踪误差的产生是多方面的,主要的跟踪误差有三方面。
1)信号处理电路的延迟滞后,较长时间的滞后主要存在于整个跟踪系统的两个环节:热成像组件和图像跟踪器。红外热像仪延迟包括光机扫描和视频合成两个环节;图像跟踪器的延迟包括D/A转换、帧存数据存取、脱靶量计算等环节。总的时间延迟造成的跟踪误差已经很大,必须加以补偿。补偿的办法是加入目标速度前馈控制,实现对运动目标的快速跟踪,同时外推插值。
2)电子线路漂移、量化误差及噪声。电子系统的噪声,尤其是传感器及传感器线路的噪声要尽可能降低,否则会对控制系统产生不良影响。首先,噪声降低了传感器的分辨力,从而影响控制系统的稳态精度;其次,噪声限制控制系统的频带宽度,从而影响控制系统的动态品质。
3)不垂直度引起的框架解耦误差:光电吊舱的框架由于加工、装配等原因造成框架不垂直度与控制系统解算所依据的坐标系有一定偏差,从而带来最终的控制误差[5]。
其它方面:a图像跟踪器的算法误差;b伺服系统的动态响应能力;c伺服系统的频带及采样频率等。
以上跟踪误差造成光电吊舱在跟踪目标时得到的角度存在误差,有些误差可通过补偿消除,例如信号处理电路延迟滞后的补偿;有些是无法消除。
6 结语
文中提出的无人机导引设计方案合理可行,对导引过程中出现的几方面误差进行了探讨,可对设计研究提供有益的借鉴。
[1]孔韬,魏瑞轩,刘月.自主攻击型无人机的导引技术研究[J].飞行力学,2009,27(4).
[2]廖洲宝,韩传久,雷 加.基于车载GPS定位的固定目标坐标测量误差分析[J].火力与指挥控制,2004,29(2).
[3]王家骐,金光,颜昌翔.机载光电跟踪测量设备的目标定位误差分析[J].光学精密工程,2005,13(2).
[4]黄亮,刘忠,李剑辉,刘松林.空中机动平台光电载荷无源定位算法及坐标变换分析[J].海军工程大学学报,2009,21(6).
[5]耿延洛,王合龙,周洪武.机载光电探测跟踪系统总体精度分析方法研究[J].电光与控制,2004,11(2).
猜你喜欢
科学大观园(2022年14期)2022-07-17
舰船科学技术(2022年10期)2022-06-17
湖北农机化(2021年7期)2021-12-07
新世纪智能(高一语文)(2021年3期)2021-07-16
核科学与工程(2021年1期)2021-03-05
科学技术创新(2020年12期)2020-06-22
民用飞机设计与研究(2019年4期)2019-05-21
航空模型(2016年10期)2017-05-09
电子制作(2017年24期)2017-02-02
汽车维修与保养(2015年6期)2015-04-17