一种基于GPS的自动航向控制系统*
2012-10-16 08:07董沛然辛爱学
舰船电子工程 2012年12期
董沛然 张 浩 辛爱学 王 钊
(海军704厂 青岛 266109)
1 引言
现代的GPS接收机除了提供位置数据外,还可提供日期、时间、航向和航速等参数[1],根据这些参数可以对船舶的航路进行规划,实时控制舵角变化以完成自动航向控制。船舶在开阔水域航行时,可以预设好多个航路目标点,本系统即可按照目标点控制船舶自动航行。
2 GPS数据读取
2.1 GPS模块
GPS模块使用GARMIN的12通道GPS15L接收机,同时可以跟踪最多12颗GPS卫星,从而能够快速定位,数据更新率为每秒一次,性能可以满足导航的灵敏度需求和动态需求。数据接口采用异步串行数据输入输出[2],数据格式使用美国国家海洋电子协会的NMEA 0183ASCII码接口协议[3]。
2.2 GPS数据格式
采用推荐定位信息(Recommended Minimum Specific GPS/TRANSIT Data)格式[4],该格式定义见表1。
2.3 GPS数据处理
读取GPRMC数据后,分别对第<3>项纬度,第<5>项经度,第<7>项速率,第<8>项航向单独读取并存为字符串变量和double型变量,作为下一步流程航向控制的参数[5]。

表1 GPRMC数据格式
3 自动舵控制
航向控制实时更新最新航向变化,从而推算目标航向,在接口单元,建立一个独立线程。该线程完成目标航向计算,目标舵角计算,打舵过程的功能。
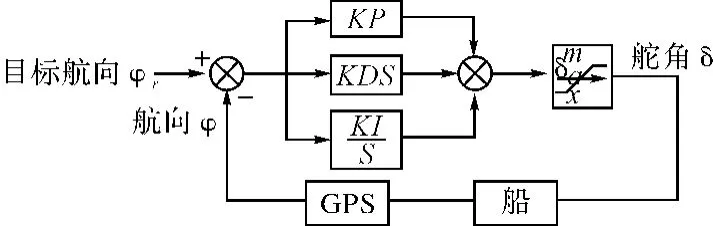
图1 自动舵控制原理
在航向改变过程中,自动舵的舵角并不只是随航向角的偏差而变化,而是和航向差变化的速率以及航向偏差对时间的积分有关[6]。由图1舵角与航向的关系为


其中K*=K·L/μ,T*=T·L/μ。
式中L和μ分别是船长和航速,由以上公式可得,当船长,船性能不变Kp与航速平方成反比。

Kd与航速的平方成反比。
若忽略首摇运动的自然频率ωn和阻尼系数ζ,舵角可以简化为


4 航向控制
4.1 目标航向算法
如图2所示,当前航向Dir用实线表示,目标航向Tar用虚线表示,R_dir指示向右偏转的航向,L_dir指示向左偏转的航向。
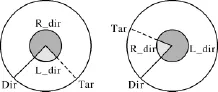
图2 目标航向算法
当Tar<Dir时候:
所有统计计算均用SASv 9.13统计分析软件进行。定量数据采用t检验、ANOVA或Wilcoxon秩和检验。定性数据用χ2检验、Fisher精确概率、连续校正χ2检验、或Wilcoxon秩和检验,考虑到中心或其他因素的影响采用CMHχ2检验。对于生存数据采用,Log‐rank检验。主要指标的两两比较,采用95%置信区间(95%CI)法,计算双侧95%CI。全部的假设检验均采用双侧检验,取α=0.05。

当Tar>Dir时候:

计算完成比较R_dir及L_dir大小,判断航向改变的方向和舵角的大小。
4.2 舵角控制优化
当目标航向计算完成,经上述公式得到舵角后,舵角量应经过舵角限定算法,防止舵角超出舵角控制范围。


由于舵机控制及舵的刹车老化,造成了在达到目标舵角时刻断开舵机继电器不能及时停止现象,而且左右舵由于惯性问题冲出的舵角大小不等,所以引入惯性系数概念,读取舵角信息的同时计算舵角变化率,当舵角变化速度高的时候,停舵提前量大,反之,若舵机继电器吸合时间短,舵变化速率慢的情况下,停舵的提前量较小:
经过一定时间的调试,当K值达到一定的时候,可以使得舵角精度达到±0.3°之间。
4.3 航路规划及执行
能按计划导航点顺序航行,在计算L_dir、R_dir前更新目标航向。
程序运行时,依次设置目标点,按顺序记录在内存中,程序装载第一个目标点位置信息,并由当前GPS经纬度计算与目标导航点的航向,更新目标航向,目标航向每秒更新一次,使船按照目标航迹航行。当到达目标点时,程序会自动切换下一目标点,启动新的航向控制[7]。
4.4 航向数据修正
如图4所示,当海浪较大时,会产生大量海浪和船首摇摆等噪音向量,这些噪音向量与真实航向的叠加,航向数据呈正弦型在真实航向周围变化,不能如实反映航向,影响到航向保持功能。
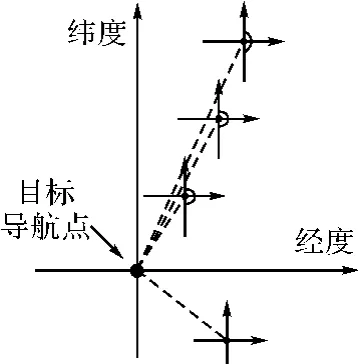
图3 根据当前GPS经纬度计算与目标导航点的航向
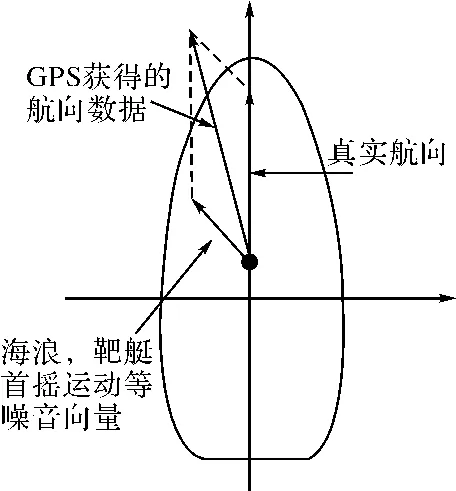
图4 海浪和船首摇摆对航向的影响
c_PLF1(k)=[c(k)+c(k-1)+ … +c(k-FIR_PLF_Len+1)]/FIR_PLF_Len
FIR_PLF_Len为第一级FIR滤波器长度,即当前时刻输入数据c(k)连同前面(FIR_PLF_Len-1)个数据求均值的数据总数。
c_PLF1(k)为第一级滤波输出;
再用IIR第二级低通滤波平滑:
Delta_Crt=c_PLF1(k)-c_Avg;Delta_Crt为当前误差,即最新输入值-上次纪录平滑后取值。
Delta_Avg= Delta_Crt* p+ (1- p)* Delta_Avg;对误差进行平滑,当前误差Delta_Crt中含有大量噪声,因此乘p=0.2,而误差均值Delta_Avg中可认为已含有较小噪声,因此乘(1-p)=0.8;
c_Avg=c_Avg+ Delta_Avg;经平滑后 Delta_Avg可以认为含有较小噪声,而真正含有航向角变化需累加到角度中。
滤波流程图如图5所示,经Matlab仿真输出如图6和图7所示。
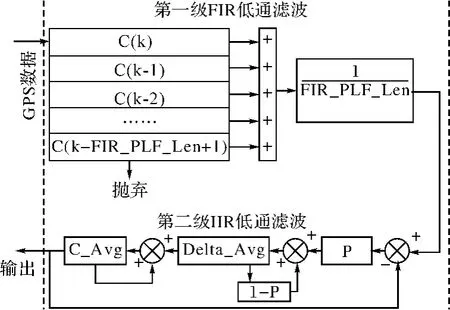
图5 滤波流程图
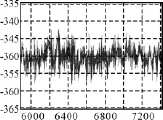
图6 航向仿真图
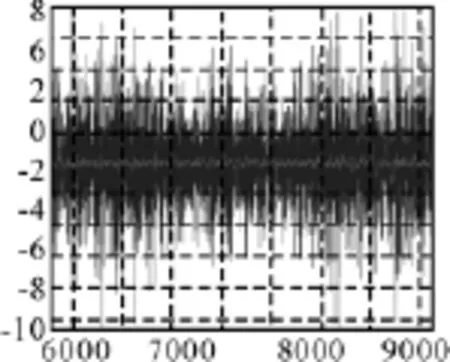
图7 航向差(噪声)仿真
横坐标为时间,单位(s)。波动较大线条为航行数据,波动较小线条是经滤波后的航行数据[8~9]。由图可以看出,真实航行纪录线条很粗,每秒航向差有可能超出10°以上,对程序来说,可能造成这一秒判断打左舵,下一秒判断打右舵,严重影响航向控制参数。数据经过滤波器后,航向差缩减到2°以内,数据平滑,已能符合程序要求。
5 结语
GPS的高精度位置信息和运动要素为有效地控制船舶的运动,使船舶航行在计划航线上提供了可能[11]。
本文仅涉及到船舶自动航向控制和自动舵的控制实现,该系统在实际使用中还涉及到很多相关的领域,如电子海图等,这些相关领域还有待今后进一步研究。
[1]郑道昌.船舶自动航行系统的研究[J].中国航海,2002(2):18-21.
[2]王俊贤.船舶在局部区域内自动导航路径识别系统[J].西安电子科技大学学报,1998(5):560-564.
[3]陈姚杰,纪业新,陈小欢.GPS在智能电动车自动控制系统中应用[J].中国科技信息,2010,19(56):126-127.
[4]NMEA,0183协议.
[5]朱示立.电子海图应用程序设计[M].国防工业出版社,1997:80-81.
[6]任茂东.船舶仿人智能自动避碰控制系统[J].中国航海,1994(1):1-7.
[7]戴忠达.自动控制理论基础[M].清华大学出版社,1989:522-530.
[8]清源计算机工作室.MATLAB基础及其应用[M].北京:机械工业出版社,2000:72-81.
[9]楼顺天,于卫.基于MATLAB的系统分析与设计[M].西安电子科技大学出版社,1998:90-102.
[10]陈娇,陈玮,陆晓野,等.基于GPSOne和航位推算的定位算法研究[J].计算机与数字工程,2012(1).
[11]李洪涛,许国昌,薛鸿印.GPS应用程序设计[M].科学出版社,1999:19-20.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
江苏船舶(2021年4期)2021-09-28
舰船科学技术(2021年8期)2021-09-18
疯狂英语·新读写(2021年6期)2021-08-05
新世纪智能(高一语文)(2021年3期)2021-07-16
儿童故事画报(2020年7期)2020-08-03
小学科学(2020年6期)2020-06-22
舰船电子工程(2020年4期)2020-06-19
民用飞机设计与研究(2019年4期)2019-05-21
创新作文(1-2年级)(2017年7期)2017-12-26