基于地理信息的地面运动目标跟踪方法❋
2013-06-27 05:50陈贻海陈怀新
电讯技术 2013年7期
陈贻海❋❋,陈怀新
(中国西南电子技术研究所,成都610036)
基于地理信息的地面运动目标跟踪方法❋
陈贻海❋❋,陈怀新
(中国西南电子技术研究所,成都610036)
为了提高地面运动目标跟踪精度,提出了基于地理信息约束的变结构交互多模(VS-IMM)的目标跟踪算法。通过建立地理信息系统约束地面目标运动状态,并利用目标转弯曲线模型确定滤波器中机动目标的时变运动模型集,采用地理信息约束的变结构交互多模算法可更符合实际进行地面目标机动跟踪。针对机场地面机动目标的仿真结果表明,给出的地理条件约束的目标跟踪算法比现有交互多模算法具有更好的性能。
地面运动目标跟踪;地理信息系统;变结构交互多模型;曲线模型
1 引言
近年来,地面运动目标跟踪监视在民用[1-2]及军事应用上[3-4]都显得越来越重要。利用地面或者机载GMTI雷达将运动目标与静止背景分辨开后,可以获得目标测量值对目标状态进行跟踪滤波。与空中目标不同的是,地面目标因常受到低可见性、高杂波和高目标密度等因素影响而增加了地面目标跟踪的复杂性。在民用领域,机场场面飞机起飞前或降落后的运动监视是典型应用[4]。由于此时飞机运动状态受机场地面地形条件约束,因此可以将对机场运动目标跟踪视为地面目标跟踪的一种特例,研究机场地面运动目标高精度的跟踪,可以提高冲突检测可靠性,增强机场滑行飞机的监控。
在地面运动目标跟踪监视研究中,拥有Markov转移概率的交互式多模型结构跟踪滤波器[4-9]有良好自适应性及高精度的优点,其算法为固定结构式交互多模型算法(Interaction Multiple Model,IMM)。文献[5-6]将IMM算法的EKF子滤波器改为无迹卡尔曼滤波(Unscented Kalman Filter,UKF)对机动目标做了跟踪滤波;文献[7]利用变结构多模型(Variable Structure Multiple Model,VS-MM)算法对机场目标多传感器融合跟踪进行了研究,其中在目标转弯时采用机场弯道半径和目标运动速度来动态估计目标角速度;文献[8]利用基于高斯和滤波器的IMM算法对地面目标跟踪进行了研究。但这些算法本质上都并没有改变IMM的固定结构,仍然不能解决IMM算法中冗余目标运动模型的干扰而带来的性能下降问题。其中文献[9]提出可结合传感器外部信息或一些先验条件而改变IMM算法的固定结构,即VS-IMM算法来提高滤波器性能。对此,可以尽可能地利用先验信息如地面地形这一限制条件动态增减目标的运动模型,或由此对目标估计位置进行修正,所以在目标发生机动时跟踪滤波器能更快速地收敛,从而得到更高的跟踪精度,提高运算速度。
本文以机场场面飞机起飞前或降落后的运动监视为例,提出了一种新的地面机动目标跟踪算法,利用机场地理信息建模来分段约束地面机动模型集合,对目标转弯运动采用了可自适应目标不规则转弯运动的曲线模型,并采用VS-IMM算法进行地面机动目标滤波跟踪,从而提高机场运动目标的跟踪精度及其机场飞机状态监控,对增加机场吞吐量具有现实的应用意义。
2 地理约束的目标运动模型
变结构交互多模(VS-IMM)算法需要判断目标在某一时刻有哪些可能的运动模型,即根据机场场面地理信息的约束条件对目标运动状态进行判断来增减跟踪滤波器中的目标运动模型。所以VS-IMM应用计算时,首先需要将机场场面道路网布局进行数字化,建立机场地理信息系统;其次,利用地理信息对跟踪目标可能的运动状态进行预测。
2.1 机场地理信息系统建立
一般来说,机场场面机动目标包括飞机和车辆等,在不同机场区域,如跑道、滑行道和停机坪等都会有不同的运动状态,在机场的跑道和相邻的滑行道处会常常会发生机动。
每条机场路段的信息可由编号、起点、终点和宽度这4个参数来描述,如图1所示。

图1 道路网络(黑点表示连接处)Fig.1 Road Network where the black nodes represent the junctions
简单起见,道路之间的连接处即上路段的终点和下路段起点的重合点,并且道路起点和终点都位于道路的中心线上。那么整个机场地图可以由一系列的路段连接点p和路的宽度w所组成,这样就构成了一个由矩形路段(图中的虚线框)首尾相连组成的机场道路网络,即路段j可由参数(j,pi,pi+1,w)定义。每个路段的长度可由路段起始点间距离得到,如果道路较不规则或较复杂可用多个路段将道路进行细化。机场道路上其他的信息,如速度和加速度限制、单行道限制等,都可以用来提高对目标的跟踪精度;也可以根据地理信息对跟踪结果进行修正[10]等。这里只讨论机场地理信息对跟踪目标模型的影响。
2.2 地理信息匹配的目标运动预测
机场地理信息可以用来调整目标的运动模型和对跟踪目标的预测值进行修正,本文只考虑如何根据机场地理信息更新目标的运动模型集。为了达到这个目的,首先必须判断目标在不在机场范围内和位于地图的哪一个路段,然后确定目标在该路段有哪些相应可能的运动模型。
确定目标在机场哪个路段大致分为两个步骤。首先,根据目标位置上一次更新的预测值查找与之最近的地理数据库里的路段,然后再判断目标位置预测值是否只落在该路段内或者是否落在多个路段内。假设目标位置为(x,y),目标上一步的预测值为(xm,ym),那么目标所有可能存在的位置坐标由一个椭圆区域构成,如图2所示。这个椭圆区域可由不等式[7]表示为

图2 地理信息匹配示意图Fig.2 Tracking prediction to locate the target on the map

其中,矩阵P是预测值的协方差矩阵,α是目标以一定概率值落在椭圆形区域的门限值。目标落入该区域的概率为

其中,r是x和y间的相关系数,这里一般为零;R
表示不确定椭圆的边界。如果目标落入该不确定椭圆区域的概率是98%,那么α=2.8。假设此时
那么可以得出不确定椭圆形区域的方向及长段轴长度:

其中,φ是目标运动方位角,σl是长轴长度,σt是短轴长度。因此,如果目标位置估计落入某个路段内,或不确定椭圆区域与该路段相交,即可预测当前目标位置可能位于该路段;如果目标预测位置可能位于多个路段,即可判断目标有可能会发生转弯机动,那么此时可将转弯运动模型加入运动模型集;如果目标沿直线运动,那么就不会用到转弯运动模型。
如果目标跟踪精度较高,那么目标位置不确定椭圆区域会较小,此时目标发生转弯机动,滤波器会因为不含转弯模型而跟踪精度下降。但随着滤波器协方差P会增大,即目标位置不确定椭圆区域增大,即能检测到目标发生转弯机动。所以目标运动模型的检测会自适应目标的机动过程。
2.3 目标转弯运动的曲线模型
对于目标的直线运动可使用匀速运动模型(Constant Velocity Model,CV)和匀加速运动模型(Constant Acceleration Model,CA)。目前对于目标转弯机动多使用匀速转弯模型(Coordinated Turn Model,
CT),但在实际应用中,目标不可能都严格沿圆周运动,所以使用CT模型会带来估计误差。这里使用一种曲线模型(Curvilinear Model,CM)[11-12]来对实际转弯运动目标进行描述。所以运动模型集包括CV模型、CA模型和CM模型。图3为目标运动模型。

图3 目标曲线运动模型Fig.3 Target curvilinear motion model
如图3所示,目标速度为V,切向加速度和向心加速度分别为at和an,速度方向角为θ(y轴顺时针方向),此时目标在直角坐标系下的运动参数可由以下非线性式来表示:

其中,R是转弯半径,可以使用一阶导数近似的方法得到线性式:
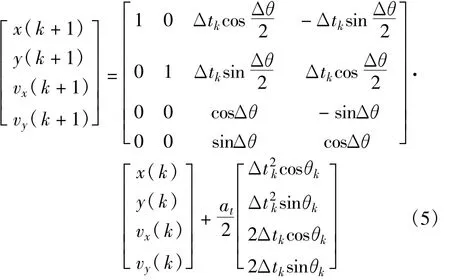
如果Δθ为零,那么上式表示目标做直线匀速运动或匀加速运动,如果at为零,那么式(3)表示目标做匀速圆周运动。可见,不同于匀速圆周运动模型目标切向加速度为零的假设,曲线模型能自适应目标的不规则转弯运动,所以能得到更高的跟踪精度。
3 基于地理约束的VS-IMM算法
在对运动目标跟踪算法中,IMM是一种具有马尔可夫切换系数的算法,能利用多个模型并行工作,算法不需要进行机动检测,通过对各个运动模型的估计状态加权,达到对目标全面适应的跟踪能力。而VS-IMM算法是一个具有可变运动模型和概率转移矩阵的IMM算法,VS-IMM算法先根据机场地理信息和上一步跟踪估计值更新目标当前运动模型集合,即每个目标运动模型的激活与挂起和目标所在路段相关,然后将各模型条件初始化,在模型条件滤波后更新模型概率,最终用各个运动模型的估计值进行交互得出跟踪的估计值。
依据机场地理信息系统的目标地形运动及其转弯运动曲线模型,本文提出基于地理信息约束的VS-IMM地面目标机动跟踪算法,简称GISVS-IMM,其流程结构如图4所示。

图4VS-IMM算法结构框图Fig.4 Architecture of the VS-IMM algorithm
GISVS-IMM算法的表述如下。
(1)目标运动模型集合更新
根据目标上一时刻tk-1的估计值与机场地理信息相结合,对目标当前运动状态M(tk-1)进行判断,更新目标当前的运动模型集。设上一次的运动模型集为S(tk),那么,

(2)目标在tk-1时刻的模型条件初始化
假设模型r∈S(tk-1),s∈S(tk)。μr|s(tk-1)是运动模型r的混合权重,

则模型s的混合估计值为

式中,prs[S(tk-1),S(tk)]为运动模型s到r的转移概率,μr(tk-1)是tk-1时刻模型s的概率。
(3)运动模型集更新后似然函数的计算
取得目标的状态估计初始值后,对tk-1时刻目标状态进行滤波,此时滤波过程与IMM算法步骤相同。目标当前运动模型集的似然函数为

运动模型概率更新计算,设

那么,

(4)当前各个运动模型估计值的交互
总体的目标状态估计值为

总体协方差为

4 计算机仿真试验与分析
假设地面目标运动规律在匀速、匀加速和转弯3种运动模型间相互转换,这样可以覆盖所有地面目标的运动轨迹。设采样周期T=1 s,观测噪声标准差为20 m,服从零均值的高斯分布。目标初始位置为(100 m,100 m)。在1~50 s做匀减速运动,X、Y轴速度值分别为65 m/s、45 m/s,加速度值分别为1.5 m/s2和1 m/s2;在50~70 s做转弯运动,转弯速率为2.5°/s;在70~150 s做匀速直线运动。
仿真中,分别利用交互多模(IMM)算法和基于地理信息的变结构交互多模(GISVS-IMM)算法进行10 000次的Monte-Carlo实验仿真。目标真实和观测轨迹如图5所示。
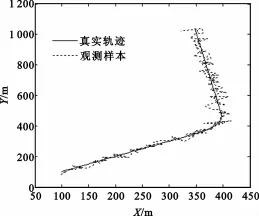
图5 仿真场景图Fig.5 Simulation trajectory of target motion
针对上述目标运动仿真条件,在同等噪声环境下,分别利用IMM算法和GISVS-IMM算法进行仿真。图6和图7分别为两种跟踪算法在X轴和Y轴上的跟踪误差均值曲线和均方根误差值(RMSE)曲线,表1为算法运算时间对比。

图6X轴坐标RMSE曲线Fig.6 X axis RMSE curve
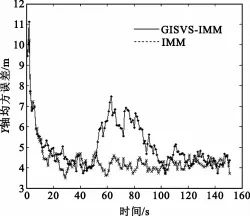
图7Y轴坐标RMSE曲线Fig.7 Y axis RMSE curve

表1 算法运行时间比较Table 1 Comparison of computation times
由图6和图7可以看出,在滤波的初始时刻,两种算法误差都较大,但一段时间后滤波器收敛,且此时GISVS-IMM误差要小于IMM,这表明GISVS-IMM比IMM收敛速度要快,且不管目标在任何运动模型时相比IMM能够得到更小的均方根误差。IMM在跟踪目标发生机动的情况下,跟踪精度会急剧下降,并可达到约7 m的峰值,GISVS-IMM误差稳定没有跳变,这表明GISVS-IMM有更好的稳定性和跟踪精度。表1可以说明采用GISVS-IMM算法后,虽然增加了目标在机场中的位置预判模块,但是减少了滤波器中不必要的目标运动模型,所以减少了计算量,相比IMM运算量减少了30%。由此可见,GISVSIMM算法在利用机场地理信息后能得到比IMM算法更高的跟踪精度和稳定性、更快的收敛速度及运算量。
5 结论
由以上的分析可以看出,首先,由于在机场地理信息的约束条件下能得到相对准确的目标运动模型集,可以避免IMM算法中目标运动模型集不准确而带来的跟踪精度降低和计算时间增加的问题;其次,为了使目标在转弯时的跟踪精度更高,采用了在匀速圆周运动模型上改进的曲线转弯模型;最后,以机场场面机动目标为例,利用GISVS-IMM与IMM算法进行了仿真对比。从仿真结果可以看出,基于机场地理信息系统的VS-IMM算法比IMM算法跟踪精度更高(特别是在运动目标发生转弯机动时),运行效率也更高。这表明本文算法能有效对地面机动目标如机场场面目标进行跟踪,对机场场面的监视能力是一个很大的提高。
[1]International Civil Aviation Organization.Manual on Advanced Surface-Movement Guidance and Control System(A-SMGCS)[M].European:ICAO,1997.
[2]Kaune R,Steffes C,Rau S,et al.Wide area multilateration using ADS-B transponder signals[C]//Proceedings of the 15th International Conference on Information Fusion.Singapore:IEEE,2012:727-734.
[3]Tian B,Zhu D Y,Zhu Z D.A novel moving target detection approach for dual-channel SAR system[J].Progress In Electromagnetics Research,2011,115:191-206.
[4]Wang H,Kirubarajan T,Bar-Shalom Y.Precision large scale air traffic surveillance using IMM/assignment estimators[J].IEEE Transactions on Aerospace and Electronic Systems,1999,35(1):255-265.
[5]宫淑丽,王帮峰,吴红兰,等.基于IMM算法的机场场面运动目标跟踪的研究[J].系统工程与电子技术,2011,33(10):2322-2326. GONG Shu-li,WANG Bang-feng,WU Hong-lan,et al. Tracking of moving targets on airport surface based on IMM algorithm[J].Systems Engineering and Electronics,2011,33(10):2322-2326.(in Chinese)
[6]Gao Liang,Xing Jianping,Ma Zhenliang.Improved IMM Algorithm for Nonlinear Maneuvering Target Tracking[C]//Proceedings of the 2012 International Workshop on Information andElectronics Engineering.Harbin:IEEE,2012:4117-4123.
[7]卢宇,刘昌忠,刘鹏飞.基于机场地理信息的多传感器融合跟踪[J].光电工程,2012,39(4):27-31. LU Yu,LIU Chang-zhong,LIU Peng-fei.Multi-sensor Data Fusion Tracking Based on Geography Guidance for Airport Target[J].Opto-Electronic Engineering,2012,39(4):27-31.(in Chinese)
[8]Streller D.Road Map Assisted Ground Target Tracking[C]//Proceedings of the 11th International Conference on Information Fusion.Cologne:IEEE,2008:1-7.
[9]Kirubarajan T,Bar-Shalom Y,Pattipati K R,et al.Ground target tracking with variable structure IMM estimator[J]. IEEE Transactions on Aerospace and Electronic Systems,2000,36(1):26-46.
[10]刘刚,潘泉,张洪才.电子地图在边扫描边跟踪侦察系统中的应用研究[J].控制与决策,2003,18(1):103-105. LIU Gang,PAN Quan,ZHANG Hong-cai.Application of electronic map in track-while-scan surveillance-system[J]. Control and Decision,2003,18(1):103-105.(in Chinese)
[11]Best R A,Norton J P.A New Model And Efficient Tracker for a Target with Curvilinear Motion[J].IEEE Transactions on Aerospace and Electronic Systems,1997,33(3):1030-1037.
[12]孙福明,吴秀清,段曼妮.曲线模型的自适应跟踪法[J].中国科学技术大学学报,2007,37(12):1455-1460. SUN Fu-ming,WU Xiu-qing,DUAN Man-ni.Adaptive Tracking Algorithm of Curvilinear Model[J].Journal of University of Science and Technology of China,2007,37(12):1455-1460.(in Chinese)
[13]Mallick M,Krishnamurthy V.Integrated Tracking,Classification,and Sensor Management[M].New York:Wiley,2012.
CHEN Yi-hai was born in Jingshan,Hubei Province,in 1983.He is now an assistant engineer with the M.S.degree.His research concerns multipoint positioning and information fusion.
Email:chyihai@163.com
陈怀新(1963—),男,重庆人,博士,研究员,主要研究方向为信息融合、图像处理、目标识别和数据挖掘。
CHEN Huai-xin was born in Chongqing,in 1963.He is now a senior engineer of professor with the Ph.D.degree.His research interests include information fusion,image processing,pattern recognition and data mining.
Email:chenhuaixin@sina.com
Ground Maneuvering Target Tracking Using Geographic Information
CHEN Yi-hai,CHEN Huai-xin
(Southwest China Institute of Electronic Technology,Chengdu 610036,China)
To improve the ground maneuvering target tracking accuracy,a variable structure interaction multiple model(VS-IMM)target tracking algorithm based on the geographic information constraints is proposed and evaluated.Firstly,the geographic information restrictions are included in both target observation and dynamic models to obtain the target state estimates.Then,the time-varying target maneuvering model set can be derived from the curvilinear model of the filter.Finally,the VS-IMM algorithm using geographic information constraints can be applied for the ground maneuvering target tracking more practically.Simulation results show that the proposed algorithm has a better performance than the existing IMM maneuvering target tracking algorithm for the airport maneuvering targets.
ground maneuvering target tracking;geographic information system(GIS);variable structure interacting multiple model(VS-IMM);curvilinear model
The National Defense Pre-research Project(No.40801040202)
date:2013-02-07;Revised date:2013-06-18
国防预研基金资助项目(40801040202)
❋❋通讯作者:chyihai@163.comCorresponding author:chyihai@163.com
TN953
A
1001-893X(2013)07-0884-06

陈贻海(1983—),男,湖北京山人,硕士,助理工程师,主要研究方向为多点定位、信息融合;
10.3969/j.issn.1001-893x.2013.07.012
2013-02-07;
2013-06-18
猜你喜欢
工会博览(2022年5期)2022-06-30
装备制造技术(2020年3期)2020-12-25
建材发展导向(2019年11期)2019-08-24
中国交通信息化(2019年12期)2019-08-13
当代陕西(2019年12期)2019-07-12
电子制作(2019年11期)2019-07-04
汉语世界(The World of Chinese)(2019年1期)2019-03-18
电子制作(2018年16期)2018-09-26
系统工程与电子技术(2016年7期)2016-08-21
公民与法治(2016年16期)2016-05-17