
异步牵引电机全速域直接转矩控制策略的研究
2013-08-03 11:56侯黎明冯晓云王永强张永贵
铁道机车车辆 2013年2期
侯黎明,冯晓云,王永强,张永贵
(1 铁道第三勘察设计院集团有限公司 机环处机辆所,天津300251;2 西南交通大学 电气学院,四川成都610031)
异步电机直接转矩控制,通过检测电机定子三相电压和电流,转换到两相静止坐标系下,计算出定子磁链和电机转矩,通过bang-bang控制器进行磁链和转矩的直接控制。克服了矢量控制坐标变换复杂,参数敏感性强的不足,系统动态性能增强。
20世纪80年代中期Takahashi和Depenbrock分别提出圆形直接转矩控制和六边形直接自控制思想[1-2],其后众多研究者的加入加快了直接转矩控制技术的发展,为了提高直接转矩控制技术在电机低速域的性能,间接—直接转矩控制技术被用于电机启动速度在20%~30%速度区间[3]。
德国鲁尔大学电力电子研究中心率先将直接转矩控制理论应用于电力牵引交直交传动领域[4]。为了满足机车牵引的需求,减小谐波的影响,十八边形磁链控制方法替代六边形成为牵引电机中速区的控制方法[5]。目前,研究者们主要在无速度传感器控制技术和参数识别技术两方面进行进一步的研究。
近年来,电动车组在国内发展迅速,但目前大多数电动车组异步牵引电机的控制均使用矢量控制方案。直接转矩控制技术在国内发展较晚,体系仍不成熟,本文以电动车组牵引电机为控制对象,根据高速电动车组的运行特点,从理论上总结出了一种适应于电动车组异步牵引电机全速度范围内的直接转矩控制策略,并进行了仿真分析,为进一步地深入研究打下基础。
1 直接转矩控制理论
两相静止(α,β)坐标系下,电机转矩方程式可表示为:

式中σ为电机漏磁系数。

式中np表示电机极对数;Lm表示电机互感;Ls,Lr表示电机定、转子端电感;ψs,ψr表示电机定、转子端磁链;θsr是定、转子磁链矢量之间的空间电角度,也称为磁链夹角。
式(1)表明,转矩决定于定子磁链矢量和转子磁链矢量的矢量积,即决定于两者幅值和磁链夹角。若|ψs|和|ψr|保持不变,则由式(1)可得

电机在稳态情况下,θsr的值通常较小,显然θsr对转矩的调节和控制作用是明显的。在动态控制中,只要控制的响应时间比转子时间常数快得多,那么在这短暂的过程中就可以认为转子磁链矢量是不变的,进而只要保持定子磁链的幅值不变,通过改变θsr就可以迅速地改变和控制电磁转矩,这就是感应电动机直接转矩控制的实质。
2 电动车组 牵引电机全速度范围控制策略
根据电动车组牵引电机的转矩速度特性,可将牵引电机速度域划分为两个区域:恒转矩运行区和恒功率运行区,如图1所示。
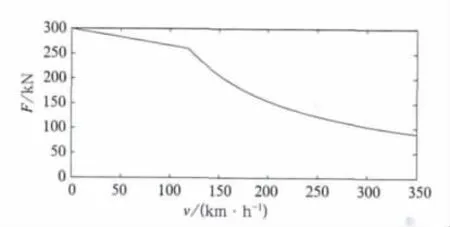
图1 电动车组牵引电机转矩速度特性
(1)为了使牵引电机在低速时保持较快的加速度,在启动加速过程中采用恒磁恒转矩控制策略,输出最大转矩,由于同时受黏着力的限制,所以工作在准恒转矩状态。准恒转矩控制区可分为低速区和中速区:在低速区即定子频率接近于零的范围内,由于开关频率和定子电阻的影响,若采用传统的直接转矩控制将产生转矩脉动大,电流谐波含量大等缺点,严重影响了低速区的控制性能。为了解决这些问题,本文采用基于定子磁场定向的间接转矩控制策略 ,并结合空间矢量调制 (SVPWM)的方式输出逆变器的脉冲信号,将磁链轨迹控制为圆形并保证恒定的开关频率。中速区转速较高,定子电阻的影响减小,采用十八边形磁链控制。
(2)恒功率控制区按控制方式可分为恒磁恒功区和弱磁恒功区。恒磁恒功区电压随频率线性增长,保持十八边形磁链不变,但输出转矩随着频率的增加呈反比例减小,到高速区,为了充分利用电压,切换到六边形磁链控制方式;当牵引电机电压提高到最大允许值时,电压保持不变,磁链随速度呈反比例减小,进入恒功弱磁调节区。
电动车组牵引电机全速域直接转矩控制框图如图2所示。

图2 电动车组全速域直接转矩控制框图
2.1 电机启动方案
针对牵引电机直接转矩控制系统启动时磁链和转矩建立过快易产生定子过电流,而过流时施加零电压矢量引起转矩波动较大、定子磁链轨迹严重畸变,造成启动过程不稳定,甚至启动失败等问题,本文提出了一种新的解决方案。
在启动过程中,转矩直接给定,磁链给定随时间增加,当增加到最大磁链给定时,切换到磁链正常给定状态,控制框图如图3所示。转矩的调节通过动态转差频率Δwsl间接控制,如图2所示,为了保证转矩启动性能,启动阶段转矩控制开环,当实际转矩接近给定转矩时,切入闭环控制。控制框图如图4所示。
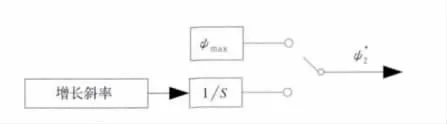
图3 磁链启动控制框图
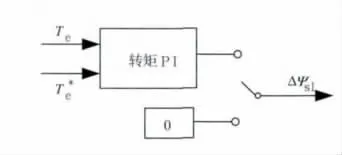
图4 转矩启动控制框图
2.2 低速范围控制策略
基于直接转矩控制理论,将电磁转矩的设定值和返回值的误差通过一个PI调节器,其输出可定义为消除转矩误差所需要的动态转差频率(定、转子相对角速度)Δωsi,与稳态转差频率和转速反馈值相加可以获得定子在下个周期的平均转速ωs,并可计算出下一个周期定子磁链即将通过的角度,即

磁链目标值给定,结合反馈值,根据磁链方程可求出作用在逆变器上的电压矢量即:

其中Rs代表定子电阻;ΔψsαΔψsβ代表磁链设定与反馈值的差值在两相静止坐标系上的分量;Ts代表开关周期、代表下一个开关周期为达到磁链和转矩设定值需要发出的电压矢量在两相静止坐标系上的分量。结合空间矢量调制算法,可以得到逆变器的三相控制信号Sa,Sb,Sc。
2.3 中速内折十八边形控制策略
内折十八边形控制如图5所示,它是在正六边形的基础上,对六边形的六个顶角作内折处理。
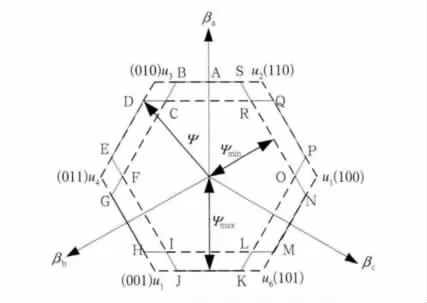
图5 内折十八边形磁链分析图
定子旋转磁链空间矢量ψ向β三相坐标系βa轴,βb轴和βc轴上投影,可以得到定子磁链的ψβa,ψβb和ψβc分量。参考文献[8]在外六边形和内六边形上分别选择合适的开关电压矢量,以生成六边形磁链。
借助内外六边形,本文提出了一种十八边形磁链寻轨策略,它基于内外两个六边形进行切换,切换基准如下:通过三个施密特触发器,将三个磁链分量|ψβa|,|ψβb|,|ψβc|分别ψmin、ψmax(如图5所示)进行滞环比较,得到磁链判断信号Sa,Sb和Sc。以a相为例:当|ψβa|≥ψmax时,Sa=1;当|ψβb|≥ψmin时,Sa=0。若|Sa|+|Sb|+|Sc|≥1,则选择生成内六边形磁链所选择的电压矢量,若|Sa|+|Sb|+|Sc|<1则选择生成外六边形磁链所选择的电压矢量,如此可得到十八边形磁链。
2.4 恒功区控制策略
当电动机的输出功率达到额定值后转入恒功率控制区。由于此时电压仍没有被充分利用,所以首先进入恒磁恒功区,在该区域内仍采用十八边形磁链进行控制。
当电压达到额定电压后进入弱磁范围,为了获得最高的电压利用率,逆变器将工作在方波方式,每个基波周期将按顺序发出6个基本电压矢量,实现六边形磁链控制。磁链ψ∝Us/f,Us保持不变,则磁链ψ与定子频率f成反比,稳态时的近似磁链值为:

弱磁区牵引电机工作在全电压状态,不能通过插入零矢量进行转矩调节。此时,转矩将通过磁链的动态调节来间接控制。根据动态调节的需要,在估算磁链给定值式(4)的基础上,加入转矩Pl调节器,调节磁链给定值的动态分量,如图6所示。

图6 恒功控制区磁链给定计算框图
3 不同控制方法的平滑过渡
由于交流传动系统是一个动态系统,即使工作在稳定状态下,电机的速度和磁链也会有很小的波动。若系统刚好工作在不同控制模式切换点附近,就有可能频繁发生不同控制模式的切换,导致过渡过程的振荡,从而导致控制性能下降,甚至控制失败。为了避免这种振荡,本文分析了不同控制模式之间切换的方法。
在牵引电机全速域控制中,经历了间接直接转矩控制到基于十八边形磁链直接转矩控制、基于十八边形磁链直接转矩控制到基于六边形直接转矩控制、基于六边形直接转矩控制到弱磁控制三大切换点。由于后两个切换点的基础都是六边形磁链的控制,因此它们之间的切换以速度点为依据进行切换,为了避免切换振荡,在切换速度点设置±1km/h的滞环。间接直接转矩控制向基于十八边形磁链直接转矩控制是由圆形磁链切换到十八边形磁链,不仅需要设置切换速度滞环,还要考虑磁链的切换。为了保证磁链的连续性,避免电流大的波动,将磁链切换点设置在βa≈ψmax,同时为了避免磁链的抖动,也增加±0.05wb的磁链滞环,即切换时|βa-ψmax|≤0.05;基于十八边形磁链直接转矩控制向间接直接转矩控制切换时,为了保证磁链的连续,不仅要满足|βa-ψmax|≤0.05,同时βbβc要满足||βx|-ψmax/2|≤0.05。
4 系统仿真结果
根据上述全速度范围内的控制策略,针对电动车组逆变系统进行仿真。仿真参数设置如下。
牵引时中间直流电压Udc设定为3 600V。
电动车组三相异步牵引电机参数:额定功率PN=560kW,额定线电压UIN=2 750V,额定电流IN=135 A,额定频率fN=137.7Hz,定子电阻RS=0.106 5Ω,定子漏感LSσ=0.001 31H,转子电阻Rr=0.066 3Ω,转子漏感Lrσ=0.001 93H,互感Lm=0.053 6H,极对数np=2,转动惯量J=5。
考虑逆风风阻,列车阻力公式:

其中m为列车质量(kg);g为重力加速度(m/s2);v为列车行车速度(m/s);dv为逆风风速(15m/s)。
磁链控制方式:低速区采用基于圆形磁链的间接转矩控制方式,当速度超过20%基速时切换到十八边形磁链,当电压充分利用后切换为六边形磁链,之后进行弱磁控制。
首先进行了间接直接转矩控制下牵引电机的启动仿真,并与直接给定磁链的工况进行了对比验证,图7分别是两种工况下启动时磁链波形,图8分别是两种工况下启动电流波形,对比可以发现,启动磁链直接给定最大值时,启动电流峰值过大,与之对比,启动磁链随时间渐变给定时,启动电流缓慢增长,无峰值电流,满足控制的要求。
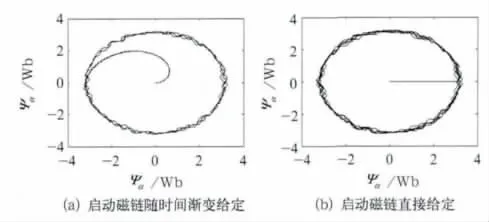
图7 启动磁链波形

图8 启动电流波形
其次,进行了全速域牵引仿真。图9~图12分别给出了电动车组全速域范围内牵引力、负载、速度、相电流和定子磁链的仿真波形。图9与图10对比可发现,当速度达到119km/h时,牵引电机从准恒转矩区切换到恒磁恒功区;当速度达到232km/h时,进入弱磁区。在进行弱磁切换前,由于电压接近满电压运行,电压波形不对称,如图13所示,导致转矩的大幅抖动,降低转矩调节性能。
弱磁切换时相电压和线电流波形如图13和图14所示。图12给出了全速域的磁链波形,与图10对比可发现,在速度达到232km/h时进入弱磁工况。图15和图16分别是十八边形磁链和六边形弱磁工况下的磁链波形图。

图9 牵引工况下电动车组牵引力与负载曲线
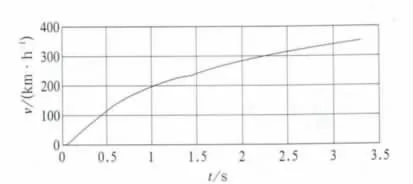
图10 牵引工况下电动车组速度曲线

图11 牵引工况下牵引电机B相电流波形
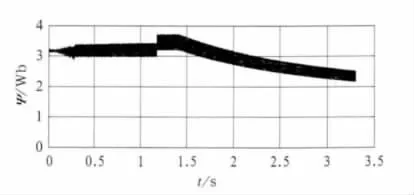
图12 牵引工况下牵引电机定子侧磁链波形

图13 牵引工况下牵引电机六边形向弱磁过渡A相电压波形

图14 牵引工况下牵引电机六边形向弱磁过渡B相电流波形
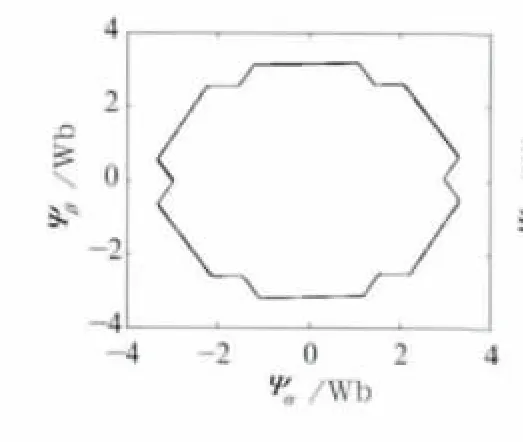
图15 十八边形磁链波形

图16 六边形及弱磁 链波形
综上分析,异步牵引电机全速域直接转矩控制方案基本满足牵引需求,可基于此进行进一步的研究。
5 结束语
基于定子磁链的间接直接转矩控制方法,直接根据磁链和转矩差计算出下一个开关周期所需要的电压矢量,达到无差拍控制的效果,解决了传统直接转矩控制在低速域所存在的转矩脉动,电流谐波大,开关频率不固定的问题;基于间接直接转矩控制,提出磁链渐变给定启动方案,有效抑制了启动电流;中高速分别采用十八边形和六边形磁链控制策略。仿真结果表明系统具有优良的动、静态性能,可应用于电动车组全速域控制。但是,高速区的控制性能仍达不到实用要求,我们将进一步进行高速区控制算法的研究和优化,为牵引电机直接转矩控制提供完善的解决方案。
[1]Takahashi and T.Noguchi.A new quick-response and high efficiency control strategy of an induction machine[J].IEEE Trans.Ind.Applicat.,Vol.IA-22,pp.820-827,Sept./Oct.1986.
[2]M.Depenbrock.Direct self control of inverter-fed induction machines[J].IEEE Trans.Power Electron.,Vol.3,pp.420-429,Oct.1988.
[3]M.Janecke,R.Kremer,and G.Steuerwald.Direct selfcontrol,a novel method of controlling asynchronous machines in traction applications[J].in Proc.EPE Conf.,vol.1,Aachen,Germany,1989,pp.75-81.
[4]Janecke M ,et al.Direct self-control,a novel method of controlling traction drives used for the first time on dieselelectric locomotives eb,1991(3).
[5]Andreas Steimel.Direct Self-Control and Synchronous Pulse Techniques for High-Power Traction Inverters in Comparison[J].IEEE Transaction on Industrial Electronics,2004,51(4):810-819.
[6]崔恒斌,陈春阳,韩 坤.电力机车直接转矩控制策略的研究[J].铁道机车车辆,2010,30(3):37-40.
[7]郭四洲,张奕黄,言海燕,王坚.抑制异步牵引电机启动峰值电流的控制策略研究[J].机车电传动,2008,(5):23-29.
[8]李 夙.异步电机直接转矩控制[M].北京:机械工业出版社,1994.
[9]Giuseppe S.Buja,Marian P.Kazmierkowski.Direct Torque Control of PWM Inverter-Fed AC Motors-A Survey[J].IEEE Transactions on Industrial Electronics,2004,51(4):744-756.
[10]Joong-Hui Lee,Chang-Gyun Kim,Myung-Joong Youn.A Dead-Beat Type Digital Controller for the Direct Torque Control of an Induction Motor[J].IEEE Transactions on Power Electronics,2002,17(5):739-746.
[11]冯江华,陈高华,黄 松.异步电动机的直接转矩控制[J].电工技术学报,1999,14(3):29-33.
[12]冯晓云.交流传动及其控制系统[M].北京:高等教育出版社,2009.
猜你喜欢
微电机(2022年8期)2022-10-12
电机与控制应用(2022年1期)2022-09-01
电机与控制应用(2022年4期)2022-06-27
中国特种设备安全(2022年1期)2022-04-26
小哥白尼(趣味科学)(2021年6期)2021-11-02
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
童话世界(2018年32期)2018-12-03
学生导报·高中版(2017年23期)2017-09-10
