
基于3-PRPS并联机构的管片拼装系统的设计与应用
2013-10-14 11:00孙志超黄晓华
机械制造与自动化 2013年3期
孙志超,黄晓华
(南京理工大学机械工程学院,江苏南京 210094)
0 引言
管片拼装机是隧道施工用的盾构掘进机中的重要关键部件之一[1]。在掘进完一环的距离后,管片拼装机负责将预制的管片安装到刚开挖好的隧道面上,形成衬砌,用来支护刚开挖好的隧道表面。管片拼装的品质会直接影响到地下水的渗透和地表沉降。管片拼装的速度对于整个盾构掘进的速度也影响很大,提高管片拼装效率能够有效地加快隧道施工进度,从而降低建设成本[2]。
目前,国内盾构施工都是采用管片拼装系统将管片拼装成隧道衬砌,管片拼装系统由行走梁、平移机构、回转机构、拼装机构等组成,虽然实现了管片移动的机械化,但是管片的对中、就位、拼装等大多数还是靠人工作业[3]。
南京三号线以及十号线所使用的德国海瑞克以及美国ROBBINS公司的六自由度管片安装机虽然能实现一般路段的拼装需求。但是在某些特殊路段,例如江边,过江隧道等特殊路段,由于地质中水分含量较高,这就要求在掘进完一环以后,迅速进行管片安装以及同步注浆。上述拼装机不能很好的满足这些特殊路段的要求。
本文设计了一种新型六自由度管片拼装机,它不但能实现六自由度的安装需求,而且与传统的拼装机相比,它能大幅度降低每一环所需的拼装时间。
1 新型拼装机机构创新设计
设计的管片拼装机安装于中盾H梁上,运行于盾尾,主要由平移机构,回转机构,调节机构以及锁紧机构组成。
如图1所示,它能实现平移、回转、升降、偏移、俯仰、摇摆六个动作。而且它能够同时拼装两个管片,提高管片拼装的效率。
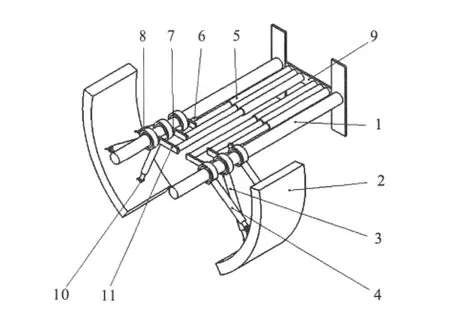
图1 拼装机结构简图
2 新型拼装机工作过程及工作原理
目前主流的管片一般采取3A+2B+1K的管片模式,如图2所示,其中A为标准块,B为连接块,K为封顶块。新型管片拼装机的拼装顺序为,底部管片A2(左),右下管片A3(右),左下管片A1(左),右上管片B2(右),左上管片B1(左),封顶管片K(右)。
管片拼装机在安装管片时,左臂先进行粗定位,用举重钳抓取A2管片,然后平移油缸退回,随后右臂顺时针旋至始发位置,抓取A3管片,在左臂拼装管片的同时,右臂移动到下一管片的位置,当左臂装完第一块管片后,右臂立即开始拼装第二块管片。以此循环,直到一环管片拼装完成。

图2 3A+2B+1K的管片建环
本论文所设计的具有六自由度的双臂交错拼装的盾构管片拼装机分左、右两套独立系统,结构和原理相同,以一套为例。
两个悬臂梁沿盾构轴线方向且左右平行地固定在盾构机中盾的H梁上面,在其中间设有中间横梁。回转轴承内圈通过套筒套在悬臂梁上,它可以单独沿z轴平移和绕z轴旋转,它的外圈一侧与升降油缸及调节油缸用螺栓连接并且与小齿轮外啮合,小齿轮固定在液压马达上,液压马达通过安装座固定在平移油缸的活塞杆上。
平移油缸固定在悬臂梁上,其同步伸缩带动升降油缸和调节油缸一起通过回转轴承在悬臂梁上滑动,也即沿z轴方向作前后平移运动。
调节油缸与升降油缸通过螺栓固定在回转轴承外圈一侧上,液压马达同步转动带动回转轴承绕z轴方向作旋转运动。
调节油缸、升降油缸配合平移油缸的协调运动可实现x轴向微调(左右摇摆)。
如图3所示,升降油缸和调节油缸行程差配合平移油缸可实现绕x轴转动(yz平面内俯仰)。
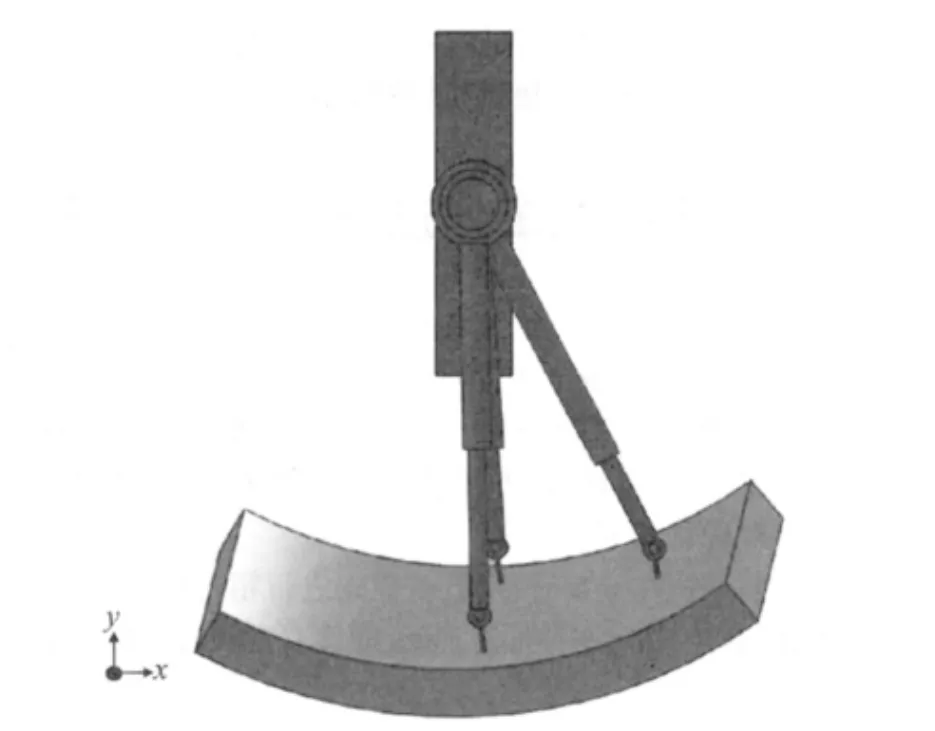
图3 管片前后俯仰
升降油缸和调节油缸的升降配合调节油缸所对应的回转轴承的旋转可实现y轴升降。
如图4所示,平移油缸的行程差配合调节油缸、升降油缸可实现绕y轴转动(xz平面内偏移)。
更重要的是,通过双臂的交错拼装,能大幅度降低一环管片的拼装时间,提高拼装效率。
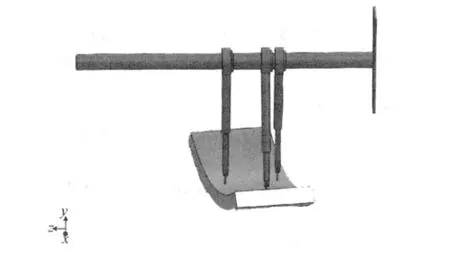
图4 管片左右摇摆
3 新型拼装机自由度分析
根据空间机构自由度的分析,其自由度为:

式中:n为构件数,g为机构运动副数,fi为第i个运动副的自由度。
本机构中,n=12,g=13,分别为3个转动副,6个移动副,3个球副,所以,自由度m=6。通过分析,该拼装机为3-PRPS六自由度并联机构,它主要以平移、旋转、升降为主,俯仰运动、偏移运动和摇摆运动对活塞杆的位移基本没有影响。
4 新型拼装机安装时间优化设计(表1)
拼装机一般要求在30 min内完成一环管片的建环,管片建环的速度直接影响了整个路段的进程。原管片拼装机需要四个工步,每个工步所需时间为206 s,236 s,256 s,291 s。设计完成一环管片所用时间:t1=206+2×236+2 ×256+291=1 481 s。
由于是双臂交错拼装,在左臂第三工步完成y轴旋转初调后,右臂就能开始第三工步并且能预先调整好x向移动,右臂第三工步的时间为t2=326-20-35-8-30-8-50=175 s,所以总的时间为t2=226+256=276=t3=933 s。
与原先的单管片拼装模式相比,提高了37%的效率,极大减少了单环管片的安装时间,提高了拼装机的安装效率,节约了整个线路开挖成本。
如果进一步采用双电瓶车供给管片的话,能进一步节约一环管片的拼装时间,大约能提高45%的效率。
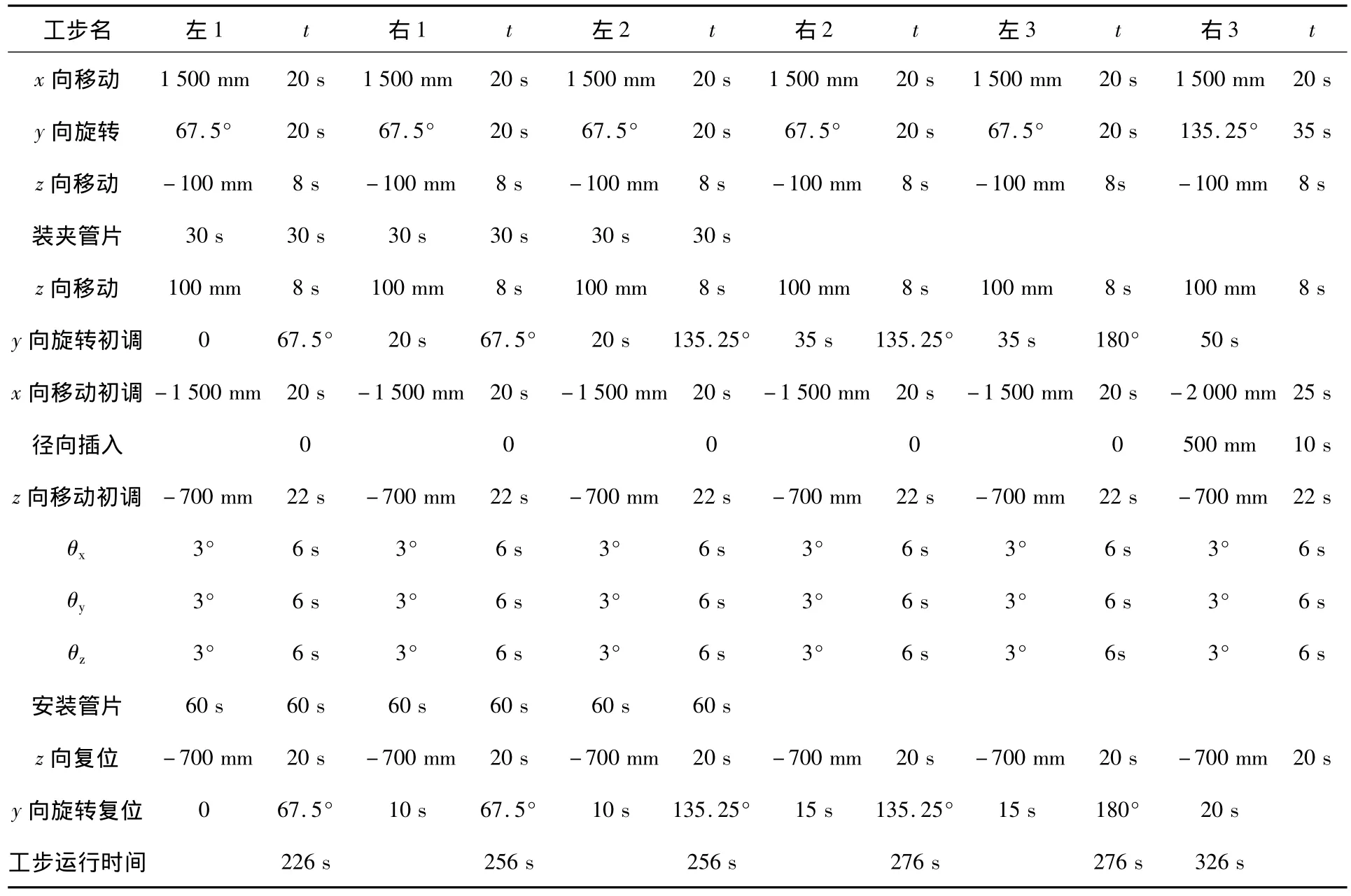
表1 新机构一环管片的安装时间
5 结论
本文设计的新型六自由度双臂交错拼装的盾构管片拼装机,与以往管片拼装机的不同在于,这种新型拼装机不仅能实现六自由度的全方位定位,而且通过双臂的交错拼装,能极大地提高管片拼装速度,加快整个路线的进程,节约盾构机的施工成本。通过将该系统与视觉测量系统相结合可以实现管片的全自动拼装,进一步提高效率。
[1]何其平.海瑞克盾构在南京地铁工程中的应用[J].工程机械,2003(2):12-15.
[2]陈纬.盾构管片拼装机结构及功能简介[J].机械工程与自动化,2012(1):92-94.
[3]崔国华,王国强,何恩光,等.盾构机的研究现状及发展前景[J].矿山机械,2006(6):24-27.
猜你喜欢
现代工业经济和信息化(2022年8期)2022-09-24
锻造与冲压(2021年3期)2021-02-27
城市建设理论研究(电子版)(2019年9期)2019-09-16
铁道建筑技术(2019年5期)2019-09-14
制造技术与机床(2018年8期)2018-10-09
Journal of Mathematical Study(2018年2期)2018-08-06
青年文学家(2017年28期)2017-11-28
工程建设与设计(2016年4期)2016-02-27
少林与太极(2014年9期)2014-10-15
机械研究与应用(2014年2期)2014-07-31
