基于DSP的车载测距安全预警系统研究
2014-01-15 09:59仇建华王建勇
电子设计工程 2014年15期
仇建华,王建勇
(1.西安航空学院 车辆与医电工程系 陕西 西安 710077;2.上海通用东岳汽车有限责任公司 山东 烟台 264000)
近年来,我国高速公路现正以高速发展,高速公路运输以其方便、快捷的优点对社会、经济生活中发挥着重要的作用,然而,高速公路运输在带来高效、快捷、方便的同时,也给人民的生命财产造成了严重损害[1]。据统计,在过去几年中,我国高速公路交通事故百公里发生率约为普通公路的4倍,且重大、恶性交通事故时有发生,汽车追尾事故约占我国高速公路交通事故的 1/3左右,已成为近几年我国高速公路交通事故的主要形式之一[2]。对高速公路汽车追尾事故形成原因的分析表明,事故的产生原因主要为行驶车辆间的间距小于安全距离[3]。
为了从根本上解决上述公路客运车辆运行中存在的安全隐患问题,本文设计和实现了一种基于DSP的车载测距安全预警系统,该系统充分利用DSP高速数字图像处理技术,能够实时判别、警示客运车辆驾驶员跟车距离过近、容易导致追尾碰撞事故的危险性驾驶行为。
1 系统总体设计及工作原理
基于DSP的车载测距安全预警系统的结构组成如图1所示。它主要由激光雷达传感器、TLC5510数据A/D转换模块、TMS320DM643数字信号处理 DSP、MC9S12XS128单片机、LCD液晶显示器、声光预警模块等组成。数据信息采集处理系统采用基于TMS320DM643内核的北京合众达公司生产的SEED-DEC643高速数字信号处理DSP,同时为了节省DSP的内部资源,采用飞思卡尔公司生产的MC9S12XS128单片机实现对车辆行驶状态参数的采集及声光警示[2]。
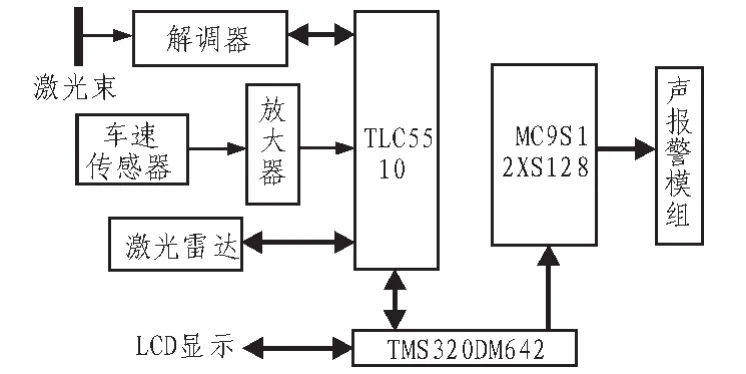
图1 硬件结构图Fig.1 The figure of the hardware structure
系统的工作原理:在汽车启动以后系统开始上电工作,从Flash加载程序并进行系统初始化,主要完成芯片初始化、外围硬件配置等工作,为数据信号输入及处理做好准备。初始化工作完成后,激光雷达实时测量行驶车辆间距,经过高速A/D转换器转换后变成数字量,存在信息处理芯片内部存储器内;与此同时,测速传感器模块将车速信号记录下来,通过高速A/D转换器转换后变成数字量,输入到信息处理芯片,经过特定算法计算实时得到的汽车运行安全车距。某一时刻,当一场道路环境信息采集完后,CPLD发出中断唤醒信号通知DSP,DSP收到中断后;将SRAM里的数据从片外读入其片内数据空间,并进行数据处理,计算出该时刻的跟驰车距并与事先设定的安全车距进行比较。如果跟驰车距小于安全值,则发出命令由语音系统发出语音警报,同时显示行驶车辆间距,提醒驾驶员注意控制车速,保持安全车距,如果跟驰车距大于安全值,则继续读入下一轮检测重新计算。
2 系统的硬件设计
2.1 激光雷达传感器
激光雷达传感器用来采集车辆前方的道路环境信息,是系统的关键部件之一,为了满足系统工作可靠性的需求,激光雷达传感器选用型号HDL-64E S2的高精度激光雷达传感器,使用了64束激光光束、905 nm波长、可以实现360°旋转、角分辨率高达 0.09°、180 M point/s的数据采集,50~120 m采集距离。它安装在客运车辆前部牌照上方位置,通过对半导体激光器进行脉冲或编码调制,利用激光镜头使脉冲状的红外激光束向前方照射,由光学天线发射的激光束遇到前面的障碍物或车辆后,产生向后散射信号,被光学天线接收,通过受光装置检测其距离[4]。
如图2所示为激光雷达传感器的搜索工作模式,根据中华人民共和国道路交通安全法实施条例第八十条规定的内容,机动车在高速公路上行驶;车速超过100 km/h时,应当与同车道前车保持100 m以上的距离,车速低于100 km/h时,与同车道前车距离可以适当缩短,但最小距离不得少于50 m。依据上述要求并结合客运车辆的实际运行情况,设置中央激光束的检测距离为100 m,这样就能够及时的检测出的前方运动车辆,适时辨识危险状态并发出警报[5]。
2.2 数据A/D转换模块
数据转换模块采用高速的A/D转换器,其型号为TLC5510,其采用CMOS工艺制造,8位、20 MSPS模拟量变数字量的转换器 (ADC),它采用半闪速结构 (semi-flash architecture)。单5 V工作电源且功耗只有100 mW(典型值)的功率。内含采样和保持电路,具有高阻抗方式的并行接口和内部基准电阻。
2.3 数据信号处理系统
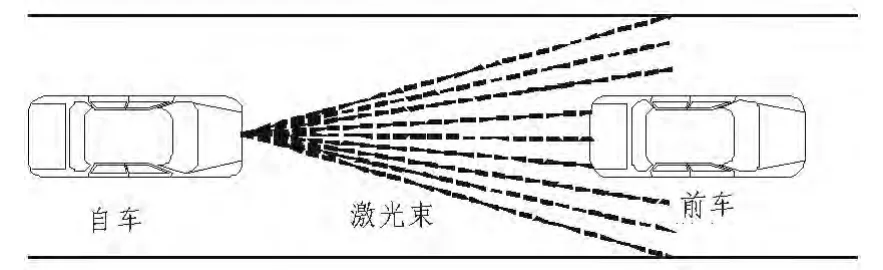
图2 激光雷达传感器的搜索工作模式Fig.2 The search work mode of laser radar sensor
SEED-DEC643是以高性能的32 bit定点DSP(TMS320DM643)为主控芯片的DSP系统,主频高达600 MHz,处理性能可达 4800MIPS,SDSRAM:4M×64 位,Flash:4M×8位,完全满足运算的需求。芯片上集成了一个多通道音频串行接口(McASP)外设,具有8根串行数据线,由软件配置输入和输出,具有很强的可编程能力,可以配置为多种同步串口标准,可以和音频ADC、DAC,Codec,数字音频接口接收器DIR和S/PDIF传输物理层器件实现无缝连接,直接与各种器件高速接口。2个RS232/RS422/RS485异步串行通信接口,这两个串口之间可以通过编程进行相互切换;RTC实时时钟能够为数据的采集与处理提供时间信息;8个数字信号输入及输出接口,可以轻松实现云台的控制或环境的监测和控制[6]。
2.4 车辆行驶状态参数的采集与处理系统
霍尔式车速传感器的信号为脉冲信号,客运车辆工作状况异常复杂,车速信号在采集和传输过程中极易受到环境的影响,因此本文采用光电隔离电路进行滤波处理,处理后的高低电平车速信号再经过电压比较器LM311整形,整理为标准的脉冲矩形波形,抑制噪声干扰,车速信号采集处理电路如图3所示。
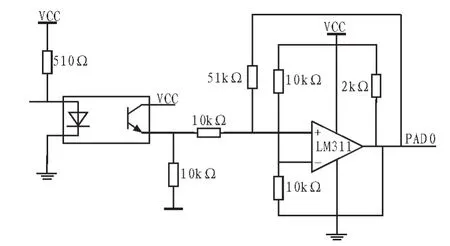
图3 车速信号采集处理电路Fig.3 The circuit of speed signal collection and processing
MC9S12XS128的PA0口接受处理后的车速脉冲信号,实时计算出车速数据。MC9S12XS128中的计数器每隔一个采样周期记录传感器信号的脉冲数,车速计算公式为:

式中,N位计数器记录的脉冲数;l为车轮的周长;p为从动轮每转一圈传感器输出的脉冲数;T为采样周期[7]。
2.5 声光预警系统
声光报警电路设计如图7所示,通过MC9S12XS128的PB0、PB1、PB2口分别控制红、黄、绿 3个发光二极管,利用PP0口输出PWM方波,调整占空比来控制蜂鸣器的报警声音。系统采用分级式报警策略,即若两车处于相对安全状态,绿色发光二极管亮,系统不报警;若两车处于相对危险状态,黄色发光二极管亮,蜂鸣器发出长音,系统报警;若两车处于异常危险状态,红色发光二极管亮,蜂鸣器急促音预警[8]。

图4 声光预警电路Fig.4 The circuit of sound-light alarm
3 系统的软件设计
系统软件设计流程图如图5所示,系统初始化完成后,设置好相应的标示位,开始数据采集,解调出相对距离和方位信息,不断输出的距离和方位信息经中央处理器分析,监测前方运动车辆的行驶状态,实时解算自车与前车之间的相对速度和相对距离,判断这些相对运动参数是否达到设定的临界值,决定本车的最安全行驶速度,当有可能发生事故时,系统触动报警装置,发出声光警报。
激光雷达的测距公式如下:

式中,c为激光光速;fa为正向调制过程中,发射信号与接收信号的差额;fb为负向调制过程中,发射信号与接收信号的差额;ω为调制波的重复频率;Δωm为最大调制频率。
前方车辆与自车之间相对速度的测量公式如下:

式中,f0为发射波中心频率[9]。
结合前方车辆与自车之间的相对速度,相对减速度,和自车的行驶车速以及自车驾驶员的制动操作信息,前方车辆与自车之间的相对安全距离的计算公式如下:

式中,Ssafe为两车不致相撞的最短距离,即临界安全距离;Vh为自车车速;Vf为前车车速;ah为自车减速度;af为前车减速度。
4 实验及结果分析
系统在南京依维柯试验车上安装调试,选择高速公路及城市道路等结构化道路上进行了验证性实验,对系统的可靠性进行了测试。实验结果表明,基于DSP的车载测距安全预警系统运行稳定,能够实时对驾驶员跟车距离过近的危险驾驶行为进行判别,通过声光报警对驾驶员进行警示,预防交通事故的发生,系统判别准确率达95%以上,虚警率低,完全满足了设计要求,达到了预期目的。
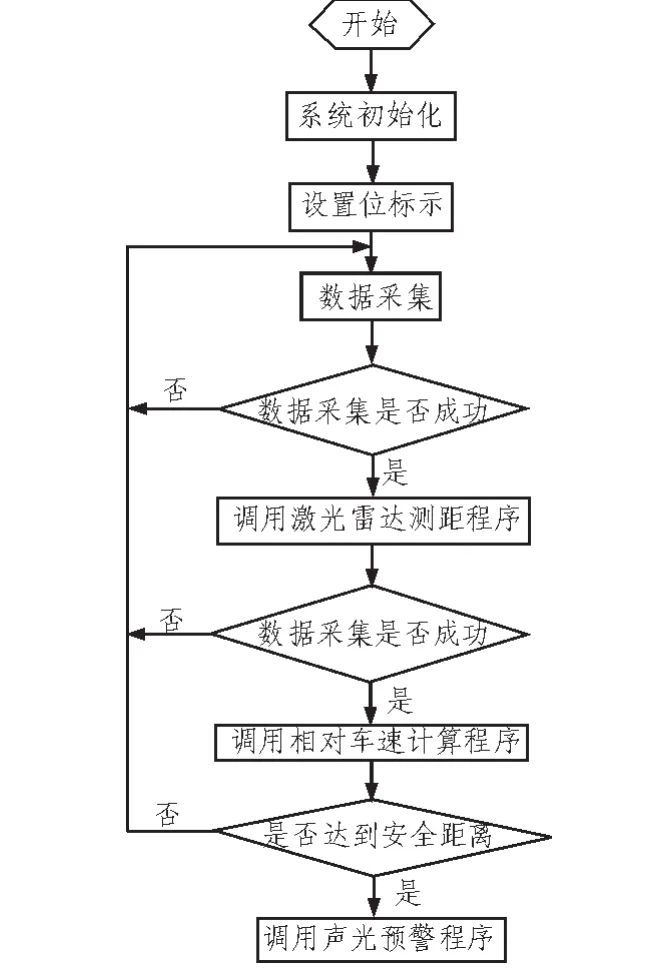
图5 系统软件设计流程图Fig.5 The flow chart of system software design
5 结束语
文中以嵌入式DSP为硬件开发平台,设计了一种基于DSP的嵌入式车载测距安全预警系统的实现方案,当车辆距离过近时,系统发出警报提醒驾驶员注意保持车距.系统工作稳定性高,虚警率低,采用声光结合的分级式报警,避免了频繁急促报警使驾驶员长期处于紧张状态,价格成本低。客运车辆上装备该系统,可以对公路客运车辆驾驶人的驾驶行为进行有效监管和规范,进一步提高公路客运车辆的主动安全性能,加强相关交通管理部门的监察力度,有着广泛的应用前景和市场需求,具有重要的社会经济意义。
[1]林广宇,魏 朗.基于图像的车载行驶安全监控系统设计[J].空军工程大学学报:自然科学版,2006,7(5):30-32.LIN Guang-yu,WEI Lang.The design based on image of vcehicle driving safety monitoring system[J].Journal of Air Force Engineering University:Natural Science Edition,2006,7(5):30-32.
[2]王紫婷,战绪庶.一种基于防汽车追尾的车载测距安全预警装置的研制[J].自动化与仪器仪表,2006,4(22):36-37.WANG Zi-ting,ZHAN XU-shu.Based on the development of the vehicle range safety warning device[J].Automation&Instrumentation,2006,4(22):36-37.
[3]于兵,张为公,龚宗洋.基于DSP的嵌入式车道偏离报警系统的硬件平台[J].测控技术,2009,7(28):22-28.YU Bing,ZHANG Wei-gong,GONG Zong-yang.Based on DSPhardware platform of embedded lane departure warning system[J].Measurement&Control Technology,2009,7(28):22-28.
[4]邓明哲.高速公路追尾碰撞预防报警系统的研究[D].武汉:武汉理工大学,2006.
[5]韩洋.高速公路汽车追尾防撞预警系统研究[D].山西:中北大学,2008.
[6]顾柏园.基于单目视觉的安全距预警系统研究[D].长春:吉林大学,2006.
[7]Narayan Srinivasa.Vision-based Vehicle Detection and Tracking Method for Forward Collision Warning in Automobiles[C]//IEEE Symposium on Intelligent Vehicles,2002:626-631.
[8]杨炜,魏朗,巩建强,等.客运车辆运行状态图像监控系统设计[J].计算机工程与 设计,2012,33(8):3006-3010.YANG Wei,WEI Lang,GONG Jian-qiang,et al.The design image monitoring system passenger vehicle running status[J].Computer Engineering and Design,2012,33(8):3006-3010.
[9]张青森.基于单目视觉的车辆主动安全技术研究[D].成都:电子科技大学,2011.
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
运输经理世界(2021年22期)2021-06-12
民用飞机设计与研究(2020年4期)2021-01-21
河南科学(2020年3期)2020-06-02
汽车实用技术(2020年1期)2020-02-25
电子制作(2019年11期)2019-07-04
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
中国交通信息化(2017年12期)2017-06-06