
基于双目立体视觉的植株生长状态无损监测方法的研究
2014-02-18 05:34尹世和韦鸿钰马稚昱
现代农业装备 2014年3期
尹世和,梁 玉,韦鸿钰,杨 煜,马稚昱※
(1.仲恺农业工程学院机电工程学院,广州 510225;2.广东省现代农业装备研究所,广州 510630)
基于双目立体视觉的植株生长状态无损监测方法的研究
尹世和1,梁 玉2,韦鸿钰1,杨 煜1,马稚昱1※
(1.仲恺农业工程学院机电工程学院,广州 510225;2.广东省现代农业装备研究所,广州 510630)
基于双目立体视觉的植物生长状态无损测量方法研究,能快速地对植株生长进行无损监测,尤其能准确测量倾斜生长的植株高度,对于农业工程研究有重要意义。本研究在实验室搭建计算机双目立体视觉平台,对大豆植株生长进行无损监测。由于植物的形态与生长条件限制,双相机光轴与基线的夹角未能构成最佳双目测量系统,因此本研究对双目立体视觉平台本身的精度进行了校验。利用VC++ 6.0编制的图像分析处理软件,结合界跟踪算法与斜率计算对植株的顶芽进行识别,能取得很好的效果。研究表明,实验表明双目立体视觉可应用于植物无损监测,具有广阔的应用前景。
双目视觉 图像处理 无损测量 植株 株高
0 引言
双目立体视觉技术是目前可视化研究中的关键技术,是利用两个摄像机同时对同一物体从不同方位观测,获取不同视角下的两幅图像,进而利用三角测量原理从两幅图像的视差中获取物体的空间三维信息,实现物体的三维重构,进一步实现对被测物体的运动状态、形态特征等相关信息的动态监测。近年来随着机器视觉技术的快速发展,及图像处理技术的专业化、计算机硬件成本的降低和速度的提高,计算机视觉技术得到广泛应用,尤其是伴随温室产业的不断发展,国内外在利用计算机视觉技术检测温室植物生长方面已经开展了广泛研究。Affeldt、Guye、Meyer及Gunasekaran[1-4]等研究人员分别利用机器视觉技术对大豆、番茄、玉米等植物的各种生长信息进行了无损检测的研究。2005年,Ishizuka[5]等研究了利用机器视觉技术对多株水稻的出叶速度和叶片生长率进行了研究,发现温度和日照时间对水稻苗的出叶速度和叶片生长率都有很大的影响。但由于农业中的研究对象都是植物,其特点是个体差异很大,生长背景复杂,这就给图像的处理及特征提取带来很大的困难,因而需要研究高效率、高精度的图像处理方法。
本研究以大豆植株为研究对象,采用双目立体视觉技术构建了一套适用于多株连续无损监测系统,应用于植株高度测量,实现对植物株高的无损实时监测。
1 双目视觉系统测量原理
双目视觉系统的基本原理是对被观测对象同时
从两个不同视角获取图像,然后根据三角测量原理计算图像中的对应像素间的视差,获取被观测对象的三维信息,实现被观测对象的三维重构。目前根据相机安装方式的不同,双目视觉系统主要由以下几种模式:双目横向模式、双目横向会聚模式及双目纵向模式(也称双目轴向模式)。
在双目相机安装过程中,两个相机安装夹角及基线长度是影响系统测量精度的主要因素[6],为了增加测量精度,基线一般不能太小,但基线长度也不可太长,否则,由于物体各部分相互遮挡,两个摄像机可能不能同时观察到目标点。双目立体视觉成像模型如图1所示。左右相机中心分别是Ol和Or,左右镜头中心分别是Fl和Fr,OlFl和OrFr分别是左右相机的光轴。镜头中心连线FlFr是系统的基线。αl和αr分别是相机光轴与基线的夹角。pl和pr分别是空间点P在左右相机上的成像点。当相机光轴与基线的夹角αl和αr相等,即αl=αr并且α∈[30°,60°]且α∈[30°,60°]范围内系统的测量误差较小,在45°左右时系统测量误差最小,夹角对称分布可构成最佳双目测量系统[7]。
现实测量中,成熟大豆植株的高度高为30~80 cm,为了保证植株在相机图像范围内并防止平台部件接触植株,设定相机支架与植株苗床的距离为800 mm,基线B=270 mm,因此相机光轴与基线的夹角采用αl=αr=80°,相机中心距苗床高度为40 cm。
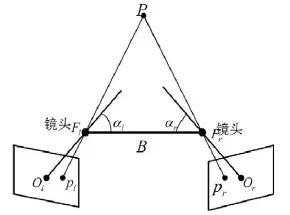
图1 双目立体视觉成像模型
2 双目监测系统的硬件设计
为了能在长时间连续实现对多株植株的形态参数无损测量及分析,本文构建了一套多点自动旋转式双目视觉监测系统,如图2所示。双目相机安装在一旋转云台上,旋转云台可在210°内每隔一定间隔定角度自动旋转;该旋转云台被安装在水平直线导轨上,直线导轨在步进电机驱动下每隔一定时间可以每隔一定距离自动取像、测量、分析,实现对对株植株个体生长参数的监测分析。
该测量平台的控制中心采用以PLC作控制器的控制模式,计算机通过串口与PLC进行通信。该测量平台可测量前后两排多株植株。

图2 移动旋转平台示意图
3 双目监测系统的软件系统
实现该测量的过程包括了以下几个模块:图像采集、相机标定、特征提取、立体匹配、三维重构。本实验选择了维视数字图像技术有限公司提供的分辨率为1 024×768的MV-VD078SC/SM型双摄像机。标定系统利用维视数字图像技术有限公司开发的CCAS双目测量测试开发平台,基于张正友平板标定方法可以轻松实现双相机的标定[8]。
双目标定时,首先对双目系统中的每一个相机进行单相机标定,确认相机的畸变系数和内参矩阵,从而确定所选每个相机的内部参数。得到单相机的参数后,再用所构建的双目测试系统的双相机从不同的角度去拍摄该标定板,角度不同对同一标定板获取不同的2张图像,分别计算2张图像的相应像素坐标再和实际标定板的坐标匹配就可以得到当前
双相机的位置参数。
不同种类植物的株高定义不同,测量方法也就不同。本研究以直立型大豆植株为研究对象,其株高是指从植株根部露出土壤部分到植株最高点的距离。因此本研究的双相机采用了基线B=270 mm相机光轴与基线的夹角αl=αr=80°的方式安装。并对测量平台的精度和误差进行了实验验证。
4 双目监测平台的精度实验
本实验通过自制校验标靶(图3)进行,标靶上分布5个距离不同的红色特征点,采用VC++编写了双目测试平台精度校验的软件系统,其流程如图4所示,包括了图像获取、特征分割、轮廓提取、去除噪声、立体匹配、三维重建及误差计算。
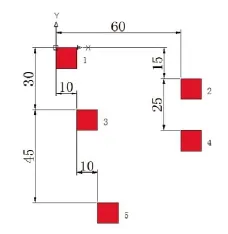
图3 精度校验标靶图案
利用该双目测试系统,如图5所示,两台相机同时从不同角度、不同位置获取46张标靶图像,对标靶图像上的不同特征点进行了识别,并对图像上的每个特征点的三维坐标进行重构、计算及分析。通过三维坐标计算特征点之间距离及并与标靶上特征点的实际距离作对比,得到该双目测量平台的测量误差,从而对测量平台本身精度进行校验,实验数据见表1。
如表1所示,通过对比46组平台精度校验所输出的测量误差数据可见,当双目测量系统的基线为270 mm、相机光轴与基线的夹角为αl=αr=80°时,该双目测量系统的测量精度达到99.62%,标靶倾斜角度越小误差较小,适合植株高度的测量需求。
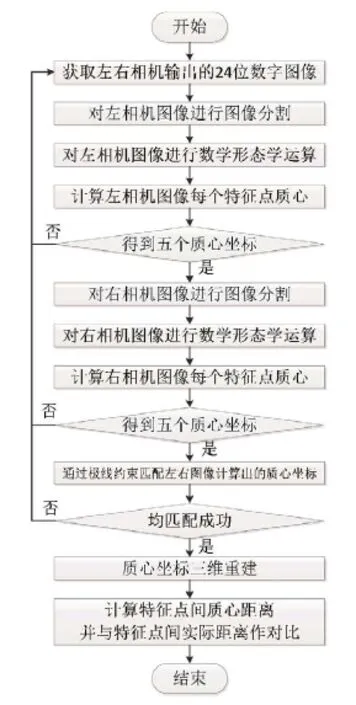
图4 平台精度校验程序的程序流程图

图5 本研究的一次平台精度校验
从测量结果看,产生误差的可能原因是标定板的选择,标定板的精度对系统测量误差具有一定的影响,标定板的精度越高,系统的测量误差就越小,而且标定板的大小也会影响测量误差,一般标定板的大小应为测量范围的1/3左右。
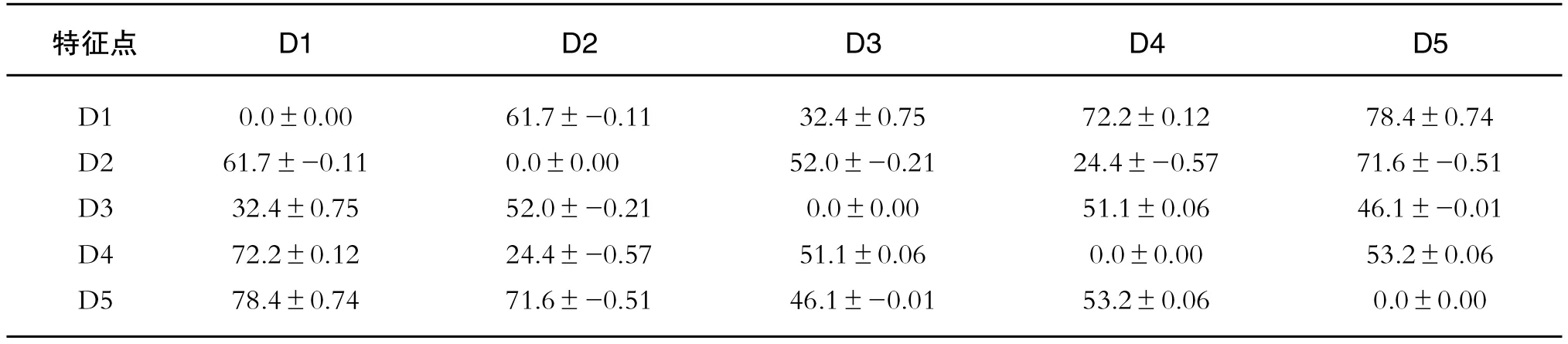
表1 双目测试平台精度实验误差数据结果 mm
5 结论
本文针对植株生长参数的测量构建了一套多点自动旋转式无损双目视觉监测系统,并对该系统的测量误差进行了试验分析。这套系统可以对多株植物的株高实现无损快速测量,测量的精度可达99.62%,测量误差主要来自与标定系统的误差。该系统可以节省植物生长过程中植株参数测量的劳动力,使人们从单调、重复和高强度的监测工作中解放出来,克服了人类视觉的易疲劳、误差大等局限性,提高了监测的准确性和连续性,真正实现了植物生长的无损监测。
[1]Affeldt H A,Brown G K,Pason N,etal. Treetrunk growth and damage prognosesby digital image analysis[J].Transactions of the ASAE, 1989,32(5):1812-1820.
[2]Guyer A.Machine vision and image processing for plant identification[J].Transaction of ASAE, 1986,29(6):1500-1507.
[3]MeyerG E,StepanetA,Shelton D P and Dickey E C.Electronic image analysis of crop residue cover on soil[J].Transaction of ASAE, 1987,31(3):968-973.
[4]Gunasekaran S,Cooper T M,Berlage A G,et al.Imageprocessing forstresscracksin corn kernels[J].Transactions of the ASAE,1987,30 (1):266-271.
[5]Ishizuka T,Tanabata T,Takano M,et al.Kinetic measuring method of rice growth in tillering stage using automatic digital imaging system [J].Environment Control in Biology,2005,43 (2):83-96.
[6]娄小平,郭美萍.双目视觉测量系统标定精度提高方法研究[J].北京信息科技大学学报(自然科学版),2010(1):16-20.
[7]刘琼,秦现生,应申舜,等.双目视觉测量系统结构参数设计及精度分析[J].中国机械工程,2008(22):2728-2732.
[8]岳晓峰,祁欢.基于张正友平面模板法的双目立体视觉系统标定[J].机械工程师,2014(2):1-3.The Research of Non-destructive Measurement which Based on the Binocular Stereoscopic Vision
Yin Shihe1,Liang Yu2,Wei Hongyu2,Yang Yu2,Ma Zhiyu2
(College of Mechanical and Electrical Engineering,ZhongKai University of Agriculture and Engineering, GuangZhou 510225,China;Modern Agricultural Equipment of Guangdong Province,Guangzhou,510630)
The research of non-destructive measurement which based on the binocular stereoscopic vision can monitor the plant without destruction quickly.Particularly,this means can measure the plant height accurately which is significant to agricultural engineering research.We established the computer binocular stereo vision platform in our laboratory and then used it to monitor the soybean.Since the restricts that limit the morphology of plants and growths which makes the dual camera optical axis Angle with the baseline can never the best binocular measurement system.So we checkout the precision of binocular stereo vision platform.It can take good effect to identify the terminal bud of the plant by using VC++6.0,boundary tracking algorithm and slope calculation.The research shows that binocular stereoscopic vision can put into use in non-destructive testing of plant,which has great prospect.
stereo vision;Image processing;Non-destructive Measurement;Plant;Plant Height.
2012年广东省扶持农业机械化发展专项课题:瓜类蔬菜机械化嫁接加工技术集成与示范(项目编号KB12061)
尹世和(1991-),男,本科,主要研究方向机械设计及其自动化。Email:yin_shi_he@163.com。
※通讯作者:马稚昱(1974-),女,副研究员,主要研究方向现代农业装备。Email:mazhiyu2002@hotmail.com。
猜你喜欢
科学(2020年5期)2020-11-26
汽车维修与保养(2020年11期)2020-06-09
电子制作(2019年20期)2019-12-04
中国惯性技术学报(2019年3期)2019-10-15
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
中国惯性技术学报(2017年1期)2017-06-09
西安工程大学学报(2016年6期)2017-01-15
舰船电子对抗(2016年5期)2016-12-13
现代计算机(2016年11期)2016-02-28
