
武术套路旋风脚900°接马步可行性试验研究
2014-05-14 02:40王森
天津体育学院学报 2014年2期
王 森
武术套路旋风脚900°接马步可行性试验研究
王 森
研究旋风脚720°增加为900°旋转的可能性,创新武术腾空动作,丰富武术腾空动作理论,为旋风脚900°接马步的实践提供理论指导。运用三维DLT测量法,对6名优秀武术运动员旋风脚720°接马步进行试验研究证实,具有较大增加角速度的能力,也具有进一步提高腾空高度的能力,因此,完成旋风脚900°接马步具有较大可能性。左摆动腿在完成旋风脚900°接马步中将发挥重要作用,试验研究证实,左摆动腿角速度还有较大提升空间,左摆动腿本身质量大、旋转半径长、转动惯量大,左摆动腿角速度增大能够直接带来腾空前动量矩储备水平的大幅增加。因此,提高对左摆动腿的重视程度,通过专项训练大幅提高左摆动腿Vz和Vy分速,同时做到左腿与左臂合理配合提高同步性,确保在踏跳有支撑阶段左腿左臂角速度方向和旋转方向一致,科学增加角速度储存动量矩提高腾空后旋转能力,同时提高腾空高度,为顺利完成900°旋转做贡献。在研究过程得出的增加左摆动腿Vz和Vy分速、增加踏跳有支撑阶段肢体同步性、第3步上左脚时左膝关节的迅速左前旋、上左脚时左转腰上摆双臂、有效控制上右脚踏跳步幅、踏跳时扣右脚,以及踏跳时增大甩腰速度和幅度的有效技术,能够直接提高旋风脚720°接马步动作的质量。
武术;旋风脚720°接马步;旋风脚900°接马步;角速度
旋风脚720°接马步对优秀武术运动员来说完成比较轻松,而旋风脚900°接马步是在旋风脚720°接马步基础上增加180°旋转,目前还没有运动员能够完成。本文研究优秀运动员旋风脚720°接马步技术,通过深入分析探讨优秀运动员是否还具有增加旋转度数的潜力,提出对增加旋转有帮助的技术,为运动员是否选择尝试实践这一创新动作提供参考,并对具体旋风脚900°接马步实践提供理论和技术指导,同时进一步改进提高旋风脚720°接马步技术,增加旋风脚720°接马步腾空高度和旋转速度,提高动作质量。
旋风脚900°是腾空动作,人体处于腾空无支撑状态时,满足动量矩守恒的条件,腾空阶段动量矩不会增加也不会减少,无论人体空中动作多么复杂,其总动量矩完全由腾空瞬间的初始条件所决定[1]。腾空阶段动量矩大小取决于离地前动量矩储备水平,储存动量矩多少决定着理论上能够旋转多少度数,因此,腾空前储存的动量矩就是旋风脚900°完成旋转的保障,旋风脚900°要在720°基础上再增加180°旋转,能否完成900°旋转要取决于腾空前是否能够比旋风脚720°储存更多动量矩完成超出的180°旋转。本文主要研究角速度是否还具有大幅度提高的可能,如有大幅提高的潜能,就能够储备足够的动量矩实现旋风脚在原基础上增加180°旋转,完成900°旋转。
实现旋风脚900°旋转还受腾空高度影响,角速度如能增大,储存的动量矩增多具备完成足够旋转的能力,同时具有提高旋转速度缩短完成旋转时间的能力,但是还必须有足够的腾空时间才能够确保真正完成动作,如果还能够具有提高腾空高度的潜力,将大幅度提高完成旋风脚900°接马步的可能性。因此,本试验假设,旋风脚720°接马步腾空前还有进一步增加角速度的能力,也具有提高腾空高度的能力。
1 试验对象与方法
1.1 试验对象
山东省6名优秀武术队员为研究对象。6名优秀运动员旋风脚720°接马步完成质量高,在比赛中都能获得动作难度满分0.4和连接难度满分0.2的加分,无技术扣分;优秀运动员技术稳定,技术风格突出,6名队员完成旋风脚720°接马步较容易,能随心所欲发挥技术,技术特点体现出显著个人风格,利于通过横向比较发现问题。
1.2 测试的过程与方法
根据爱捷三维分析系统试验要求,进行三维拍摄,采用爱捷三维DLT框架标定,2台Panasonic数码摄像机三脚架固定,离地125 cm,主光轴相交90°,以25帧/s同步定点拍摄。6人进行3轮拍摄,然后选取每名队员完成动作质量高、清晰和干扰较小的旋风脚720°接马步动作图像,使用爱捷运动图像采集器,采用日本松井秀治人体模型,进行数字化解析。逐幅解析动作,获得各关节垂直分速、角速度等运动学参数,并对获得数据采用低通数字滤波进行数据平滑,截断频率8 Hz,获得本研究所需数据。
由于右腿离地前是作为踏跳腿与地面接触,并且和身体纵轴在右脚离地前形成旋转支撑轴,右腿对动量矩影响较小,因此本文主要研究左臂、右臂、左腿和躯干角速度是否具有大幅度增加的能力。选取左右臂腕关节、躯干胯部和左腿踝部为分析点,研究其角速度变化情况,研究离地腾空前动量矩储备,作用最大的应是接近腾空前动作过程[2-4]为了便于对6人角速度进行比较,共同以助跑倒数第2步左脚触地开始制图,试验获得的6人左右腕、左踝和胯角速度具体数值通过EXCEL自动生成曲线(见图1)。为了方便直观对比分析单独生成的6人上右步、摆左腿的左右腕、左踝和胯角速度曲线图和图1的同步对应,幅数和角速度值对应,角速度曲线完全相同,真实反映角速度变化情况,曲线最高点离0°/s线越远曲线峰值越大,角速度越大,正负分别代表角速度左右转动方向。上右脚阶段是指助跑倒数第2步左脚触地开始至右脚踏地的区间;右脚踏地和左脚离地之间,所有运动员衔接都非常紧密,只间隔1幅(0.02 s)的时间,所以不做分区;摆左腿是指右脚踏地至右脚离地前左腿摆动过程(见图1)。
2 结果与分析
2.1 6名队员完成动作时旋转度数情况
6名测试队员在助跑方向上完成动作成马步(左右脚踝角速度接进零时对应胯转角度:HXG第58幅、LJP第58幅、LZ第55幅、LZH第59幅、ZHR第61幅、ZJH第57幅)稳定以后,胯转角度都大于720°,胯转动角度最小的LZH比规定的720°超出52.142°,跨转动角度最大的HXG超出69.535°,平均超出规定度数59.721°。当前已经完成180°旋转的1/3,再转2/3,即120°左右就能够实现900°旋转,因此后续角速度增加只要能够提供120°左右旋转,运动员就能完成旋风脚900°(见表 1)。

表1 6名运动员在助跑方向上完成动作后胯转角度Table1 The angle of the hip turned movement finished
2.2 上右脚时角速度曲线分析
2.2.1 上右脚时左腕角速度曲线分析 从左腕角速度曲线可清晰看到,在上右脚阶段,6名测试队员左腕角速度曲线最高点距0°/s线比较远,左腕角速度曲线峰值都很大,最小的LJP左腕角速度曲线峰值也接近1 000°/s角速度线,在上右脚阶段左腕角速度普遍比较大。因此,此阶段6名测试队员左臂在储存和转移动量矩中发挥着重要作用,6人左腕角速度曲线峰值虽然都很大但是也存在较显著的差距,峰值最大的HXG和LZ左腕角速度超过1 600°/s角速度线,峰值最小的LJP左腕角速度在1 000°/s角速度线下。相比之下,LJP左腕角速度还有很大上升空间,ZJH和LZH左腕角速度曲线峰值和最大峰值之间也存在较大差距,ZJH和LZH左腕角速度也具有较大上升空间。因此,在上右脚过程中,LJP、ZJH和LZH还有较大增加左腕角速度能力,即增加动量矩的储存和转移能力,具有进一步增加旋转角度的潜能(见图2)。
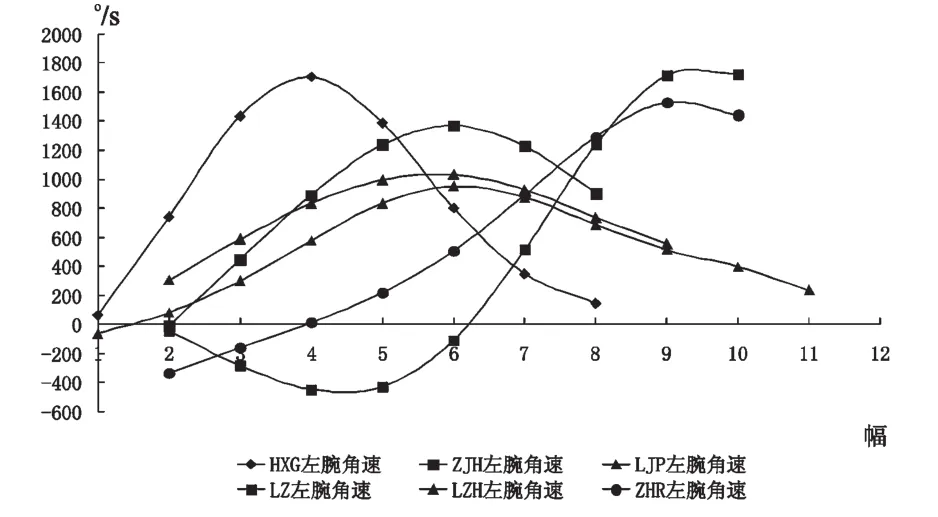
图2 6名测试队员上右脚时左腕角速度曲线Figure2 Angular velocity curve of the six subjects left wrist walking forward right foot
2.2.2 上右脚时右腕角速度曲线分析 6名测试队员在上右脚阶段,右腕角速度曲线最高点距0°/s角速度线普遍较远,曲线峰值集中在1 200~1 800°/s角速度线之间,右腕角速度都很大,在此阶段都起到储存大量动量矩作用,仅有HXG和ZHR角速度小幅度降低,动量矩发生部分转移,右臂的大角速度对整个动作的旋转起到积极作用;此阶段,ZJH和ZHR曲线峰值距其他4名测试队员还有较大差距,还有进一步增加右臂角速度提高动量矩增加旋转角度的能力(见图3)。
2.2.3 上右脚时胯角速度曲线分析 上右脚阶段,6名测试队员胯角速度曲线最高点在600~1 200°/s角速度线之间,整体上胯角速度较低,但是6人最大角速度还是具有较大差距,特别是LZ和ZHR胯角速度最大值在800°/s角速度线以下,距最大胯角速度曲线峰值还有较大差距,胯角速度还有进一步较大提升空间,还能够储存更多动量矩,也具有增加旋转角度的能力(见图4)。
2.2.4 上右脚时左踝角速度曲线分析 6名测试队员上右脚过程中,左踝角速度曲线峰值差距较大,角速度最大的ZHF在2 600°/s角速度线上,而最小的ZJH在800°/s角速度线下,差距非常大。此阶段角速度曲线代表动量矩转移的情况,主要是左腿动量矩转移到全身能力,促进全身的旋转,促进上步,这种转移是通过左膝关节积极左前旋和左脚落地缓冲实现的,动量矩在身体内的传递和转移主要是利用某些身体环节的突然制动,从而使这些环节原已获得的动量矩向相邻环节传递和转移[1]。在左脚触地以后,左腿动量矩转移到胯部,带动全身绕左踝旋转,如果以身体为参照物对左踝来说是围绕身体旋转,因此,此阶段胯角速度差距大,充分说明还有进一步通过增加左膝关节积极左前旋和身体其他部位有力配合提高储存和转移动量矩的潜力,即进一步增加旋转提高旋转角度的能力(见图5)。
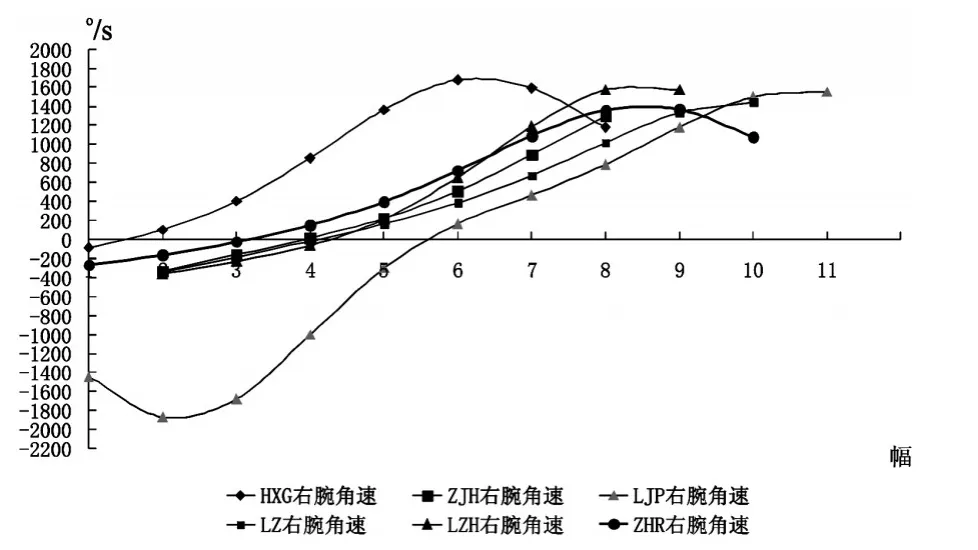
图3 6名测试队员上右脚右腕角速度曲线Figure3 Angular velocity curve of the six subjects right wrist walking forward right foot
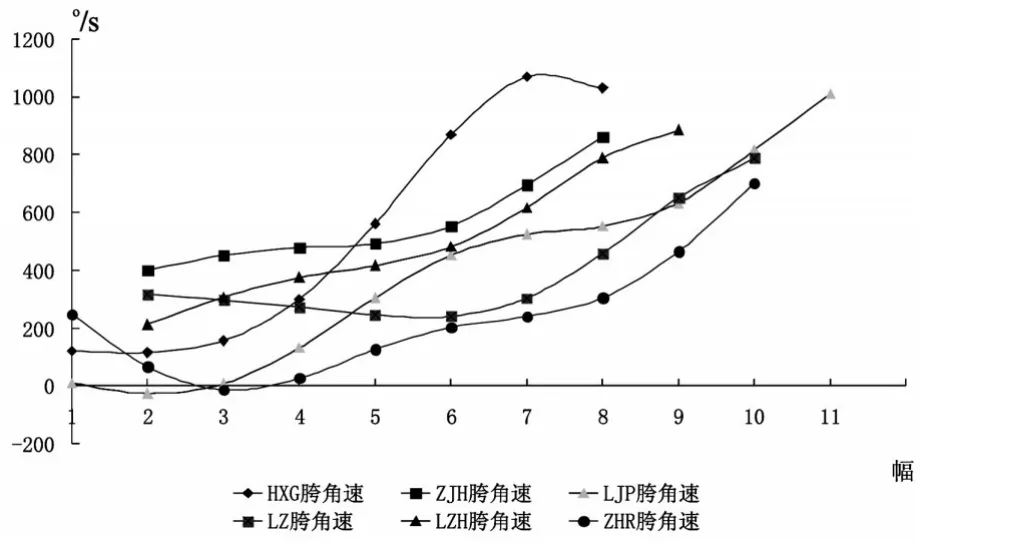
图4 6名测试队员上右脚时胯角速度曲线Figure4 Angular velocity curve of the six subjects crotch walking forward right foot
2.3 摆左腿时角速度曲线分析
2.3.1 摆左腿时右腕角速度曲线分析 右脚踏跳摆左腿阶段,6名测试队员左腕角速度曲线最高点距0°/s角速度线较远,最近的ZHR左腕角速度曲线峰值也在1 000°/s角速度线以上,左臂此阶段角速度大,对动量矩影响较大;ZHR左腕角速度曲线峰值距LZH和LZ(1600°/s角速度线)还有较大差距,角速度有进一步提高的空间;HXG和LJP角速度曲线峰值在-1 800°/s角速度线左右,角速度大,动量矩大,但角速度负值代表与旋转方向相反,动量矩越大对总动量矩的储存越不利。因此,在摆左腿右脚踏跳支撑阶段,改变HXG和LJP左臂摆动方向,提高其角速度,对促进动量矩储存有较大作用,对提高旋转角度有重要价值(见图6)。
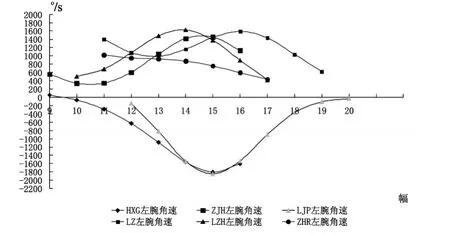
图6 6名测试队员摆左腿时左腕角速度曲线Figure6 Angular velocity curve of the six subjects left wrist swaying the left leg
2.3.2 摆左腿时右腕角速度曲线分析 6名测试队员右腕角速度曲线相似度比较高,角速度曲线最低点接近0°/s角速度线附近,没有出现较为显著的差异,继续增加角速度的潜力不大,此阶段右臂受躯干阻挡,角速度向全身转移,右臂运动方向是顺身体旋转轴向上摆动,但此阶段加速右臂快速上摆,会提高蹬地力,获取较大的支撑反作用力,对提高腾空高度能够起到积极作用(见图7)。
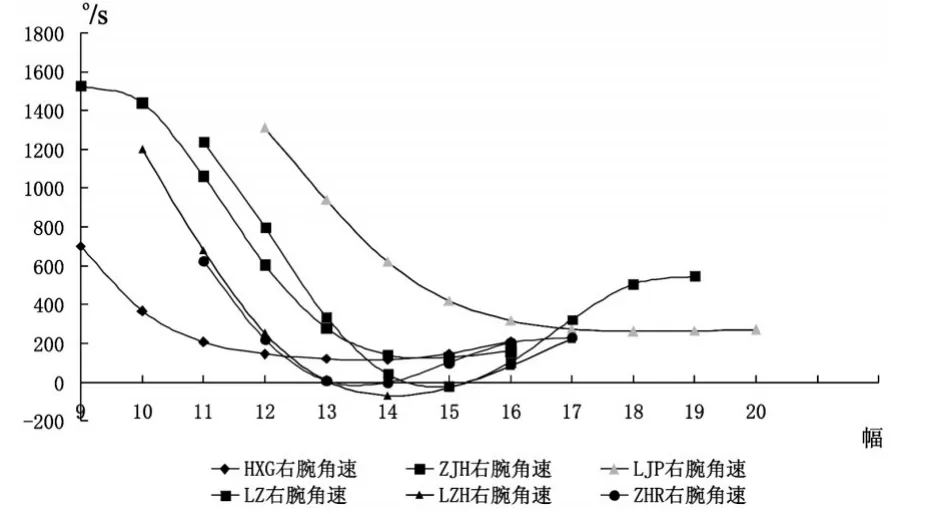
图7 6名测试队员摆左腿时右腕角速度曲线Figure7 Angular velocity curve of the six subjects right wrist swaying the left leg
2.3.3 摆左腿时胯角速度曲线分析 4名测试队员在离地腾空瞬间,角速度都集中在800°/s角速度线附近,角速度保持了较高水平,角速度高储存动量矩多,腾空后旋转能力强;ZJH和LJP胯角速度在腾空瞬间较小,ZJH和LJP胯角速度分别在600°/s和400°/s角速度线下,胯角速度还有较大的提升空间,还有增加角速度提高动量矩储备的潜能,也具有进一步增加旋转角度的能力(见图8)。
2.3.4 摆左腿时左踝角速度曲线分析 LZH左踝角速度曲线最高点超出其他5位测试队员很多,LZH左踝角速度曲线峰值在90°/s角速度线以上,排第2的HXG角速度曲线峰值仅在800°/s角速度线以下,角速度还有很大上升空间,左踝角速度曲线峰值最低的是LZ,其角速度峰值远低于LZH,只在500°/s角速度线附近,LZ角速度具有更大的上升空间。可见,此阶段5名测试队员左踝角速度上升空间普遍较大,由于左腿质量大、旋转半径长、转动惯量相对较大,角速度增大动量矩变化明显,大幅度提升角速度会带来左腿动量矩储备水平大幅度提高,对整个动作腾空前动量矩储备将起到积极作用。6人中有5人还具有通过增加左腿角速度大幅度提高动量矩储备的这种潜力,因此,利用左摆动腿能够进一步储存大量动量矩的能力,通过训练提高左摆动腿角速度,大幅度提高离地瞬间动量矩储备水平,使其具有旋转更多角度的能力,能够进一步提高完成900°旋转的可能性(见图9)。
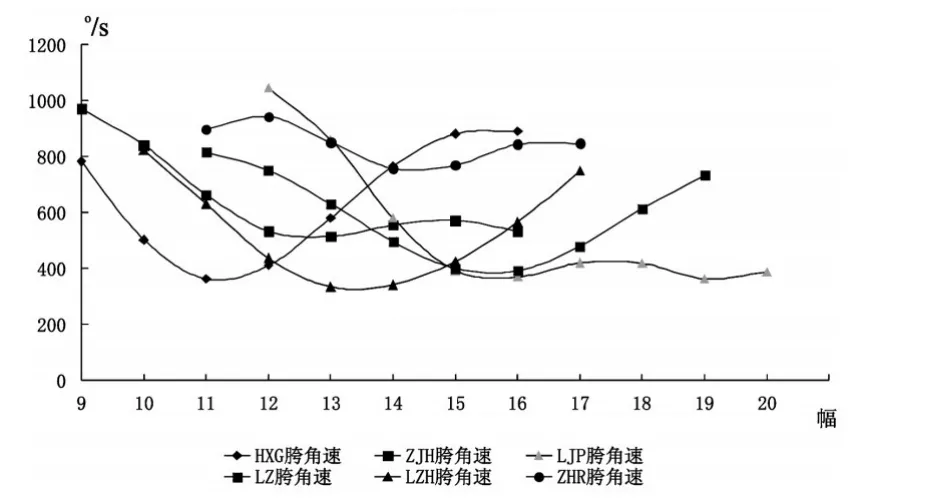
图8 6名测试队员摆左腿时胯角速度曲线Figure8 Angular velocity curve of the six subjects crotch swaying the left leg
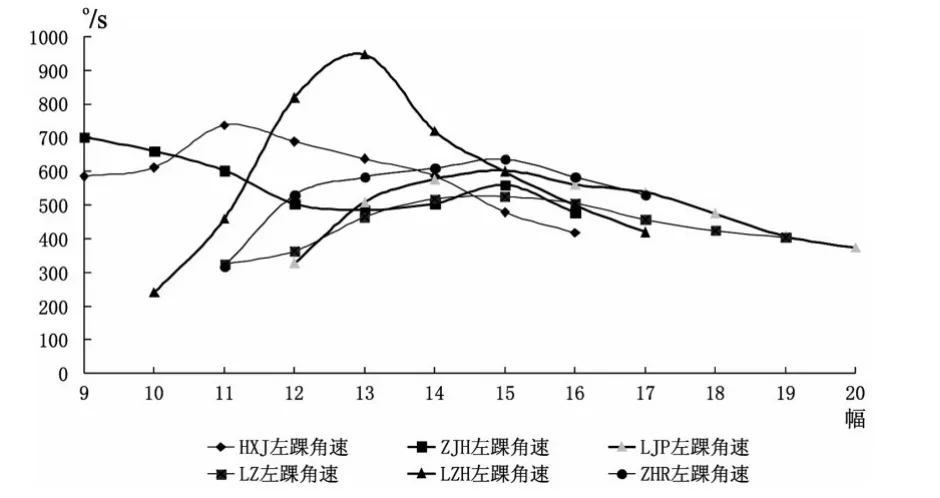
图9 6名测试队员摆左腿时左踝角速度曲线Figure9 Angular velocity curve of the six subjects left lnkle swaying the left leg
3 讨 论
3.1 6名测试队员都有进一步增加角速度的能力
通过试验对比分析可知,6名测试队员可以通过肢体角速度增加或肢体合理配合进一步增加同步性提高角速度的能力。6名测试队员都有进一步增加角速度的能力,而且5名队员还有较大角速度提升空间,5名队员在还没有充分发挥左腿角速度优势的情况下顺利完成旋风脚720°接马步,如果充分利用左腿角速度优势,大幅度提高左腿摆动角速度,能够有效增加腾空前动量矩储备水平。通过肢体协调配合提高左腿和左臂的同步性,在踏跳过程左腿和左臂同时迅速左上甩摆,左腿和左臂角速度方向和旋转方向一致,能够有效增加动量矩储备。因此,再增加其他方面的角速配合,一定能够储存足够的动量矩完成旋风脚900°旋转。
3.2 6名测试队员有进一步增加腾空高度的能力
左腿增加角速度的同时,还能增加腾空高度。LZH踏跳摆左腿时,左踝角速度最大946.339°/s,远远超出其他测试队员,但是离地瞬间初速度并没有受到影响,而且也是最大的(3.906°/s)。可见,左腿摆动路线合理、摆动速度快对提高腾空高度和储存更多动量矩有重大作用,通过专门性训练,提高左摆动腿垂直Vz和左旋的Vy分速,提高腾空高度和角速度,为完成旋风脚900°旋转创造有利条件(见表2)。

表2 测试队员踏跳摆左腿时左踝最大角速ω与离地瞬间Vz速度Table2 Maximum Angular Velocity and Instant Vertical Speed Vacant the Subjects Swaying the Left leg
3.3 提高腾空后右腿摆动速度和高度为完成900°旋转创造条件
通过提高左腿摆动幅度和速度还能提高右腿摆动的速度和高度。迅速左后上屈膝提摆左腿储存动量矩,提摆到一定程度受到牵拉制动以后,其动量矩会有一部分迅速转移到离其最近的右腿,推动右腿迅速摆动,从而提高右腿摆动速度,右腿摆动速度的提高对完成腾空阶段900°旋转有积极作用,右腿动量矩储备是完成空中旋转的关键,因此左腿的重大作用,不仅表现在离地前储存足够多的动量矩,而且对腾空后动作的完成也起到了关键作用。左腿的迅速左后上屈膝提摆还储存向上的动量矩,转移到右腿推动右腿迅速上摆,提高右腿摆动高度,一方面,为积极下压创造更大的摆动幅度,转移更多动量矩推动全身快速旋转,确保增加更多旋转度数;另一方面,推动右腿快速到达最高点,能够有效减小旋转半径,增加腾起时的旋转速度,也为进一步增加旋转创造有利条件。
3.4 进一步增加腾空前动量矩储备的有效技术
3.4.1 上左脚时左膝关节的迅速左前旋 上左脚时,左膝关节的迅速左前旋能够有效提高腾空前动量矩储备,它是通过动量矩转移来实现。上左脚时,左膝迅速左前旋,在左脚落地上右脚时,左腿动量矩会迅速转移到离其最近的胯,胯动量矩增加迅速带动躯干和右腿左旋,提高躯干和右腿角速度,躯干角速度增加就会带动左右臂增加角速度,提高左右臂角速度。而右腿角速度增加能够提高上右腿速度,并在右脚制动时转移更多动量矩,而且还能巧妙避免上右腿时右臂补偿性反旋问题,更进一步提高了右臂角速度,由于右腿有了充足的角速度,不必再通过右臂反旋增加角速度来提高上步速度,促使右臂也能够迅速左旋,从而提高右臂角速度,有效增加上右步时动量矩储备。
3.4.2 上左脚时左转腰上摆双臂 上左脚时,左转腰上摆双臂,同时躯干带动双臂左旋,使双臂在左旋转方向上储存动量矩增加动量矩储备。一方面,双臂在左旋转方向上有一定的初速度,更易于迅速加速甩臂,提高双臂角速度进一步提高动量矩储备;另一方面,上左步时,左转腰上摆臂腰带动右肩左旋,上右步时,右臂下摆就会在身体纵轴及其左侧附近运动,角速度和旋转方向一致,有效避免了右臂在旋转轴右侧下摆引起负角速度产生,减低动量矩损失,从而提高动量矩储备。
3.4.3 有效控制上右脚步幅提高动量矩储备 一方面,通过控制步幅降低稳定角最大限度减少动量矩损失,在上右脚踏地和左脚同时触地瞬间,要降低稳定支撑,减少制动,尽量减少动量矩损失,从而转移更多动量矩提高动量矩储备。另一方面获得偏心力矩,步幅控制合理(不能大也不能太小),太小偏心力矩就会减小,影响动量矩储备。韩涛[5]在研究旋风脚720°接马步踏跳前上右脚步幅时表明,运动员在完成旋风脚转体720°接马步动作时,助跑最后一步的适宜步长指数应在0.470左右。旋风脚900°要多旋转180°,要提供更多动量矩储备,步长指数可适当减小,进一步提高动量矩转移水平,偏心力矩的不足通过提高踏跳腿弹性力和绝对力量来补偿。可见,踏跳前上右脚时控制适宜步幅有重要意义,是确保动量矩有效转移的一个关键环节,为成功完成动作奠定了有利条件。
3.4.4 踏跳时扣右脚 踏跳时扣右脚,右腿快速左旋储存动量矩,右脚踏跳瞬间动量矩转移到全身,推动躯干左旋,提高躯干角速度增加动量矩储备;扣右脚,实现旋转轴超前旋转,有效减小踏跳时支撑腿旋转度数,降低地面摩擦力做功,也利于提高角速度增加动量矩储备。
3.4.5 增大甩腰速度和幅度 躯干动量矩增加对提高旋转动力有积极作用,大幅度快速甩腰能充分发挥大肌肉群作用,直接储存动量矩。另外,大幅度快速甩腰还能带动上下肢提高角速度,提高四肢摆速,增加动量矩储备,经过训练把动量矩用到最需要的地方。
4 结论
(1)旋风脚900°接马步有完成的可能性。通过试验得出,6名测试队员完成旋风脚720°接马步技术在很多方面还有进一步增加角速度的潜力,而且还具有大幅度提高角速度的能力,同时腾空高度也有升高的潜力。因此,经系统训练完成旋风脚900°接马步有较大可能性。
(2)完成旋风脚900°接马步要充分发挥左摆动腿作用。左摆动腿对提高角速度、腾空高度有非常重要的作用,以往的动作技术中还没有受到足够重视,加强左摆动腿专项训练,提高其垂直(Vz)分速和左转(Vy)分速,充分发挥其重要作用。
(3)踏跳有支撑阶段提高肢体同步性。在踏跳有支撑阶段,肢体角速度方向确保与旋转方向一致,肢体动量矩增加实现腾空前总动量矩增加,特别是左腿与左臂在踏跳阶段左上甩摆,角速度方向与旋转方向一致。
(4)有效提高旋风脚720°接马步动作质量。本文提出的增加角速度和腾空高度的技术,应用到旋风脚720°接马步训练中,也能够提高旋风脚720°接马步动作质量。
[1]赵焕斌,李建设.运动生物力学[M].北京:高等教育出版社,2008.
[2]李玉刚,严发本,肖红征,等.我国优秀武术运动员旋风脚720°三维图像特征分析[J].武汉体育学院学报,2006,40(2):39-42.
[3]张红,赵晓红,李曙刚.旋风脚720°助跑起跳阶段的三维运动学分析[J].首都体育学院学报,2008,20(6):98-101.
[4]阳家鹏.影响武术旋风脚720°完成的生物力学探析[J].体育科技,2012,33(2):64-67.
[5]韩涛.竞技武术套路运动员旋风脚720度接马步动作的生物力学分析[D].北京:北京体育大学,2006.
Feasibility Experimental Research on Tornado Kick Turn 900°to Horse-riding Stance in Wushu Taolu
WANG Sen
(School of PE,Shandong Normal University,Jinan 250014,China)
In this paper,we study the possibility of Tornado Kick from 720°to 900°for innovating wushu flight movement and enriching the theory on flight movement of wushu.It is verify that athletes had the possibility to complete Tornado Kick turn 900°to horse-riding stance through experimental study on Tor⁃nado Kick with double twist to horse-riding stance that go on increase angular velocity and increase the center of gravity of 6 excellent wushu athletes by using three-dimensional DLT measurement.We should pay more attention to the swinging leg for it will play an important role to complete Tornado Kick turn 900°to horse-riding stance.It is confirmed that the left leg angular velocity can increase greatly by confirmatory research.Therefore the moment of momentum re⁃serve level can substantial increase which left leg itself quality big,turn radius long,moment inertia big and angular velocity enlargement.To improve the Vz and Vy speed of the swinging leg,synchronicity of the left leg and arm reasonable cooperate,left leg and arm angular velocity with direction of rotation same turn direction as right foot on ground to increase the angular velocity storage of moment of momentum and increase the center of gravity for complete Tornado Kick turn 900°to horse-riding Stance.It can directly help athletes improving the quality of Tornado Kick with double twist to horse-riding stance to improve the Vz and Vy speed,Increase limb synchronicity of support phase,quickly spin left knee left anterior when step forward the third foot,turn left waist and sway upward both arms when step forward the third foot,effective control on foot spacing when hopping step,buckle inward right foot on hopping step,in⁃crease waist velocity and amplitude on hopping step.
Wushu;Tornado Kick with double twist to horse-riding stance;Tornado Kick turn 900°to horse-riding stance;angular velocity
G 852
A
1005-0000(2014)02-177-05
2013-12-09;
2014-03-03;录用日期:2014-03-04
山东省教育科学“十二五”规划课题(项目编号:2011GG114)
王 森(1970-),男,山东平阴人,副教授,研究方向为武术教学训练理论与方法、武术技术研究。
山东师范大学体育学院,山东济南250014。
猜你喜欢
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
中学课程辅导·教师通讯(2018年10期)2018-09-04
中学生数理化·高一版(2017年3期)2017-07-08
东方教育(2016年22期)2017-04-07
小天使·二年级语数英综合(2017年3期)2017-04-01
小天使·一年级语数英综合(2017年2期)2017-02-16
小天使·一年级语数英综合(2017年2期)2017-02-16
小天使·一年级语数英综合(2016年11期)2016-11-28
恋爱婚姻家庭·养生版(2011年8期)2011-05-14
