
步进电机驱动控制设计与实现
2014-09-22 05:35詹庄春
长沙航空职业技术学院学报 2014年2期
詹庄春
(华南农业大学珠江学院,广东 广州 510900)
步进电机模型及其仿真普遍地渗入到实践教学中,不负众望,经过简单开环设计,其硬件模型低速运行平稳、定位精度高;相比之下,在高速运行时,其仿真不理想,出现了“丢步”和“颤动”的问题。于是改进硬件电路,修善程序设计,且当功能实现后,做出了应有的理论分析。
1 步进电机的结构原理
往下皆以四相八拍反应式步进电机为例,采用单极性直流电源供电,其结构原理如图1所示。定转子铁心均由软磁材料或硅钢片叠成凸极结构,磁极上可开小齿,定子磁极上套有控制绕组,转子上没有绕组。
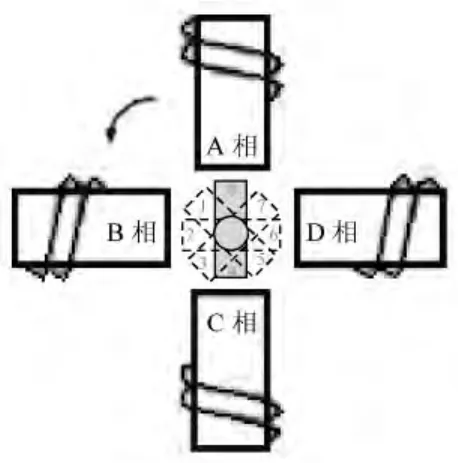
图1 四相八拍步进电机结构原理示意图
步进电机是一种将电脉冲转化为角位移的执行机构,即当步进驱动器接收到一个脉冲信号,便驱动步进电机按设定的方向转动一个固定的角度即步矩角,其中错齿是促使电机旋转的原因[1]。通过控制脉冲个数可以控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机的转速,从而达到调速的目的。
2 驱动控制设计思路
据步进电机的结构原理可知,四相八拍触发方式为A→AB→B→…→A,为实现其相序,可采取步进电机专用控制芯片L297。通过时钟步进驱动,L297能产生4相信号、以8拍方式控制步进电机,其芯片内的PWM斩波器电路可开关模式下调节步进电机绕组中的电流,该集成电路使用5V的电源电压,全部信号的连接都与TTL/CMOS或集电极开路的晶体管兼容。
为实现对步进电机的驱动,可采取步进电机专用驱动芯片L298,其内部包含4个逻辑信道和1个双全桥式H-Bridge的高电压、大电流驱动器,接收TTL逻辑信号,可驱动46V、2A以下的步进电机,且可以直接通过电源来调节输出电压[2]。此芯片配合L297一起使用。
3 系统仿真电路的实现
该系统选用20BY-0型四相步进电机,主要包括单片机AT89C51最小系统、控制电路、驱动电路和显示电路四大部分[3],使用单片机仿真软件Proteus,利用按钮“开始”和“停止”模拟系统电源的开关,仿真电路见图2。最小系统主要保证单片机正常工作;控制电路由开关和按键组成,可实现速度加减和转向的控制;驱动电路对脉冲进行功率放大,从而驱动电机转动;显示电路是为了显示电机的工作状态和转速。

图2 步进电机控制系统仿真电路图
内部程序检测P3.4和P3.5的状态来调用换向程序,由P2.0口控制L297的方向控制端(CW/CCW)。根据P3.2和P3.3的状态来改变输出脉冲频率,由P2.1控制时钟输入端,使L297输出四相八拍工作所需的适当相序。L297的四相输出接L298的IN1~IN4,使其OUT1~OUT4输出放大后的四相驱动信号,驱动步进电机运行。通过P1口的P1.0~P1.7控制LM016L显示步进电机的转速转向。
4 系统程序设计流程
程序要完成的主要工作有系统初始值的设置、系统状态的显示以及各种开关状态的检测判断等,系统主程序流程见图3a。其中,由定时器中断子程序控制电机的转向;由外部中断子程序改变速度值存储区中的数据(即时钟周期),从而改变电机的转速,中断子程序流程见图3b。

图3 步进电机控制系统程序流程图
5 仿真结果与分析
经仿真可知,步矩角为45°,电机可实现正反转,转速加减可调,不存在丢步现象;低速运行稳定性极强,但高速运行稳定性稍差,以下对此进行理论分析。
步进电机属于一种定子单边激励,定、转子均为凸极结构的磁阻电动机,由于定子电流由变频电源供电,电动机必须在开关模式下工作。忽略磁饱和,认为磁路是线性的,此时定子绕组电感L仅与转子位置θ有关,而与电流无关,即L=L(θ),转子转动θ增加,当定子极弧逐步覆盖转子极弧,L值将直线上升,反之则直线下降,A相电感LA随θ的变化曲线见图4a。若仅有A相激励(其他依次滞后45°),设磁能为 W(iA,θ),由电感 LA(θ) 的变化所产生的磁阻转矩TeA[4]为

由式(1)可见,假设定子电流为理想的矩形脉冲,则转矩恒定,合成转矩见图4b。

图4 LA(θ)和合成转矩Te曲线图
实际上由于绕组中存在电感,电流不可能突变。参考图4,稳态运行时的A相磁链初始值ψ0=0,忽略定子电阻,设电感上升斜率为k、下降斜率为 -k、转速为Ω(单位:弧度 /秒),则有
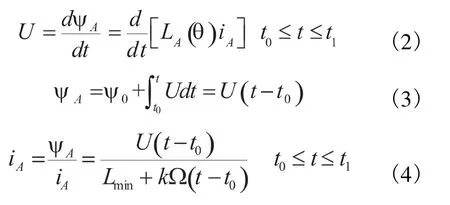
当A相关断后绕组续流[5],电流衰减,有
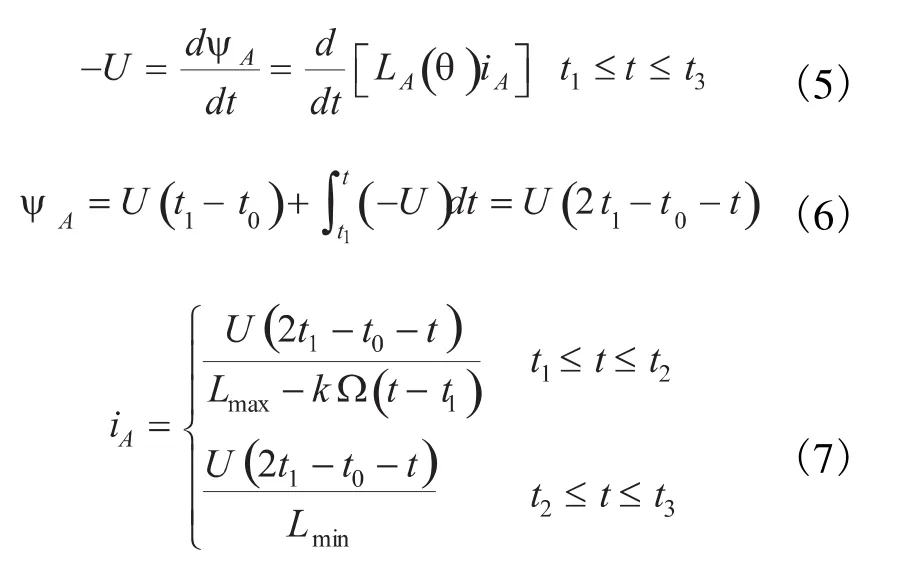
式(4)和式(7)为一周期电流iA表达式,实际电流波形还与L297的控制方式密切相关。当电机高速运行时,反电势上升,电流幅值较低,其波形见图5a。当电机低速运行时,电流幅值较高,斩波器通过控制上、下限Imax和Imin来得到电流平均值Iav,其波形见图5b。
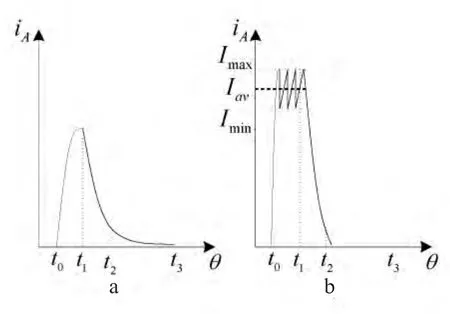
图5 高速和低速运行时的电流波形
转矩波形与电流波形类似。从图5可以看出,高速运行时合成转矩波形将会出现畸变;而低速运行时合成转矩波形接近于矩形波,且幅值较大。
6 结论
步进电机结构简单、效率较高、价格较低,调速范围较宽。通过对定子边激励信号进行功率放大,高速运行时不存在丢步现象,但存在一定的转矩脉动,稳定性稍差。进一步改进的方向是减小步矩角,可选用小步矩角步进电机。而增加转子的齿数是减小步进电动机步距角的一个有效途径,并且有利于提高控制精度[6]。
[1]韩利虎.浅谈步进电机的基本原理[J].内蒙古石油化工,2007,(11).
[2]马丽.基于单片机步进电机的控制系统设计[J].黑龙江科技信息,2013,(24).
[3]房玉明,杭柏林.基于单片机的步进电机开环控制系统[J].电机与控制应用,2006,(4).
[4]汤蕴璆,史乃.电机学(第2版)[M].北京:机械工业出版社,2005.
[5]王兆安,刘进军.电力电子技术(第5版)[M].北京:机械工业出版社,2009.
[6]王欢.基于ANSYS的混合式步进电机静态磁场及转矩特性研究[D].杭州:浙江大学,2012.
猜你喜欢
防爆电机(2021年1期)2021-03-29
测控技术(2018年2期)2018-12-09
四川冶金(2018年1期)2018-09-25
电子制作(2017年1期)2017-05-17
照明工程学报(2016年3期)2016-06-01
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年2期)2016-04-12
云南电力技术(2015年2期)2015-08-23
电机与控制应用(2015年10期)2015-03-01
电机与控制应用(2015年3期)2015-03-01
