
三相电压型PWM整流器模型自校正预测控制
2014-11-15 05:54施艳艳沈明辉王海明
电工技术学报 2014年8期
王 萌 施艳艳 沈明辉 王海明
(1. 河南师范大学河南省光伏材料重点实验室 新乡 453007 2. 国网新乡供电公司 新乡 453000)
1 引言
随着微处理器技术的发展和相关研究的深入,模型预测控制(Model Predictive Control,MPC)在电力电子及电机驱动中的应用体现出巨大的潜力和优势[1,2]。MPC是一种非线性控制技术,由于不包含线性控制器和调制器,具有较快的响应速度[3,4]。算法采用循环寻优,直接输出的控制方式,可根据数学模型对控制对象未来的运行状态进行预测。通过定义价值函数对不同电压矢量作用下的预测结果进行在线评估,并将最优的电压矢量作为控制器输出。
近来,基于MPC的功率变换器全数字控制方法得到快速发展[5]。由于MPC算法需要根据数学模型预测对象下一时刻的运行状态,其对模型的准确性要求较高[6,7]。在电力电子功率电路中常含有电阻、电感、电容等器件,温度的变化、磁路的饱和程度、电缆过载和其他环境条件变化均会使电路中的电阻、电感等器件参数发生改变。电路参数的变化将导致控制系统参数标称值与系统实际参数值不匹配,进而影响 MPC控制的稳定性和鲁棒性,降低系统的控制品质[8,9]。文献[10]将模型参数不匹配对系统造成的影响作为扰动量,采用Luenberger观测器通过前馈补偿来消除系统扰动,增强控制系统鲁棒性。该控制策略基于定频式模型预测控制算法进行设计,可对定频式模型预测控制中的模型参数不匹配问题进行补偿,但不适用于有限状态模型预测控制。文献[11]采用积分滑模控制策略消除了模型预测结果与实际闭环系统的误差,提高了 MPC控制系统的鲁棒性。由于该方法没有考虑积分滑模控制策略中开关及系统延时造成的“抖振”问题,在实际系统中较难实现。针对 MPC控制系统预测模型不匹配产生的扰动,文献[12]采用扩张状态观测器估计实际扰动,并通过前馈补偿消除扰动影响,获得了较好的控制效果。该控制算法结构复杂、计算耗时较长,对控制器的性能要求较高。文献[13]针对三相逆变器提出了一种自适应鲁棒 MPC控制算法,通过估计电感的等效电阻值,增强了 MPC控制系统的鲁棒性。该方法在保证无差拍控制算法响应速度的同时提高了控制系统的鲁棒性,有效消除了模型参数不匹配对控制系统的影响。文献[14]通过在线观测电路实际电感值,实现了三相变换器的鲁棒预测直接功率控制。该算法在观测电路实际电感值的过程中需要分别进行两次估算和两次滤波,参数观测过程复杂,系统设计难度较大。
本文以三相电压型PWM整流器(Voltage Source PWM Rectifier,VSR)为例,提出一种模型自校正预测控制。剖析模型不准确时 MPC算法的运行过程及误差产生机理。根据预测电流值和实际电流值估算实际模型参数,并实时对预测模型进行修正。控制算法结构简单、运算量小,保证了控制系统的响应速度。在控制对象模型参数不匹配时,所提控制算法具有较强的鲁棒性,可提高系统的控制品质。通过仿真和实验证明所提算法的正确性和有效性。
2 模型预测控制算法
三相电压型PWM整流器电路拓扑如图1所示。图中,uga、ugb、ugc为交流侧三相电压;ia、ib、ic为三相交流侧电流;uca、ucb、ucc为整流桥输入侧三相电压;udc为直流侧电压;iL为负载电流;O为电网中点;Lg和Rg分别为进线电感及其等效电阻;C为直流母线电容;RL为直流侧负载。
三相 VSR的数学模型可通过坐标变换转换到两相静止坐标系中,表示为

图1 三相电压型PWM整流器主电路拓扑Fig.1 Topological structure of main circuit of three-phase voltage source PWM rectifier

式中,iα、iβ、ucα、ucβ分别为整流器 α、β 轴输入电流和输入电压;ugα、ugβ分别为α、β轴电网电压。
对式(1)进行离散化,可得

定义价值函数如下式所示。

图2中以扇区III为例给出了各电压矢量对电流的影响。

图2 扇区III中各电压矢量对电流的影响Fig.2 Effect of voltage vector in Sector III on current
图2中,在整个扇区内,当选择电压矢量V2、V4、V6、V0或 V7时 diα/dt为正,而矢量 V1使 diα/dt为负;在电压矢量从θ=0º旋转到θ=60º过程中,矢量 V3、V5的作用使 diα/dt在开始阶段为正,在 θ=60º附近时为负。矢量 V1、V4、V5、V6、V0或 V7保持diβ/dt为正;而矢量 V2、V3使 diβ/dt为负。
模型预测控制策略充分利用功率变换器件的非线性特性,根据控制对象的离散模型预测系统下一时刻不同开关状态下的动态行为。通过价值函数对所有预测结果进行评估,最终选择使价值函数最小的电压矢量。因此,算法能够在每个采样周期预测到最优的开关状态作为控制器的输出。
采用MPC控制算法的三相VSR系统控制结构如图3所示。

图3 基于MPC策略的VSR控制结构Fig.3 VSR control structure based on MPC scheme
系统运行时首先采集电网电压和输入电流;将采集到的电压通过锁相环(Phase Locked Loop,PLL)得到电网电压角度;将三相电压、电流信号通过 3/2变换得到两相静止坐标系下的电压、电流信号;通过VSR预测模型,对下一时刻不同电压矢量作用下的电流动态行为进行预测;将预测的结果通过价值函数进行评估和优化,并选择最优的开关状态作为下一时刻功率开关的控制信号。以上算法在每个开关周期循环一次,因此,系统需有较高的采样频率。
3 参数不匹配时MPC控制器运行特性
模型不准确、系统参数变化等因素会造成MPC控制性能下降,导致VSR系统运行不稳定。本节对VSR模型参数不匹配时的 MPC控制器误差产生机理进行深入分析。
3.1 电阻参数不匹配
由式(2)可得一个开关周期内电流的变化量为

由式(4)可知,一个开关周期内电流的变化量由电网电压、变换器输出电压、变换器输入电流、进线电感、等效电阻及开关周期共同决定。
由于等效电阻较小,电阻压降与电网电压和变换器输出电压相比很小。在一定范围内电阻标称值与实际值不匹配对模型预测控制器的影响较小。
3.2 电感参数不匹配
由式(4)可知,电感标称值Lm与实际值Lg不匹配将直接影响电流变化量计算值的精度。因此,电感参数的变化将对模型预测控制器的性能产生较大影响。图4、图5和图6分别为电感标称值Lm准确、电感标称值 Lm为实际值 Lg的 2倍和 0.5倍时的 MPC电压矢量选择示意图。为了较为直观地体现电感参数误差对控制系统运行过程的影响,假设电流的初始位置相同,并选择电网电压矢量和矢量V6同向时刻进行分析。设i0为当前电流值,i1为目标电流值,斜线部分为目标电流值的范围。
在电感标称值准确时 MPC电压矢量选择过程如图4所示。
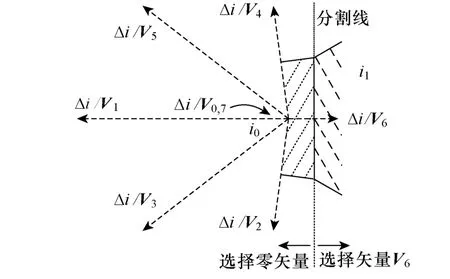
图4 电感标称值Lm准确时MPC电压矢量选择示意图Fig.4 Choice of MPC voltage vector in case of correct nominal inductance Lm
根据价值函数,MPC控制器将选择使下一时刻电流与目标电流差值最小的电压矢量作为控制器输出矢量。因此,由图4可以看出,当目标电流值位于分割线右边时,MPC控制器将选矢量 V6作为下一时刻的输出电压矢量;反之,当目标电流值位于分割线左边时选择零矢量。
模型电感标称值Lg为实际值2倍时MPC电压矢量选择过程如图5所示。
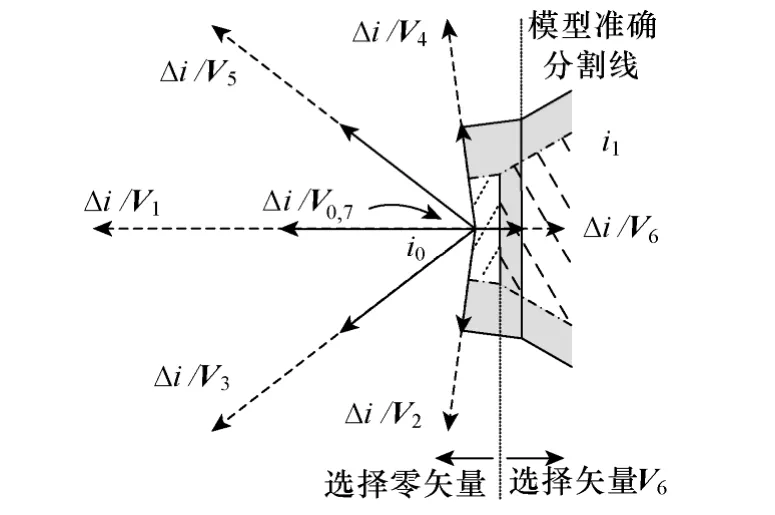
图5 电感标称值为实际值2倍时电压矢量选择示意图Fig.5 Choice of MPC voltage vector with nominal inductance equal to twice the actual value
由式(4)可知,图 5中模型电感 Lg为实际值2倍时,MPC控制器计算得到的电流变化量将减小为实际电流变化量的 0.5倍。将图中阴影分为上、中、下三部分,当目标电流值位于中间阴影左侧的斜线区域时,MPC控制器选择零矢量,在中间阴影区域及其右侧斜线区域时选择电压矢量V6。在上、下阴影区域时控制器将选择其他矢量。与图4相比可知,当参考电流值位于图5阴影内部时,控制器会输出错误的电压矢量,这将影响系统的正常运行,降低预测控制器的控制精度。
模型电感标称值 Lg为实际值 0.5倍时 MPC电压矢量选择过程如图6所示。

图6 电感标称值为实际值0.5倍时电压矢量选择示意图Fig.6 Choice of MPC voltage vector with nominal inductance equal to 0.5 times the actual value
由式(4)可知,图6中MPC控制器计算得到的电流变化量将增大为实际电流变化量的2倍。当目标电流值位于中间阴影区域及其左侧斜线区域时,MPC控制器选择零矢量,在阴影右侧斜线区域时选择电压矢量V6。在上、下阴影区域时控制器将根据价值函数最小化标准选择零矢量或电压矢量V6。由图中可以看出,只有在白色区域控制器能够获得最优的电压矢量,而当目标电流值位于阴影区域时,MPC控制器将输出错误的电压矢量。
对比图5和图6可知,与电感参数为正常值的0.5倍时的电压矢量错误选择区域相比,电感参数为正常值的 2倍时的电压矢量错误选择区域明显较大。因此,在电感误差绝对值相同的情况下,电感标称值Lm小于实际值时将对MPC控制器最佳矢量的选择造成更大的影响。
4 模型自校正预测控制
4.1 电感变化观测
由上节分析可知,电阻标称值与实际值不匹配对模型预测控制器产生的影响较小。因此,忽略电阻参数不匹配对系统的影响。设电阻标称值与系统实际电阻值相同,预测模型中电感标称值为Lm,电感误差为ΔL,有

根据式(2)和式(5),MPC预测得到的下一时刻电流值可表示为

将式(2)与式(6)的第一式相减,得电感观测值Lo为

通过式(7)可求出下一时刻电感参数的观测值,则系统在当前时刻的电感观测值可表示为

采用观测到的电感值对 MPC预测模型进行修正,可以保证 MPC运行过程中选择最优的输出电压矢量。观测器结构如图7所示。

图7 电感观测结构图Fig.7 Structure of inductance observation
图中,观测器的输入变量分别为整流器α轴预测电流 imα(k)、α轴实际电流 iα(k)、上一时刻 α轴的实际电流iα(k-1)以及模型电感值。将输入变量按式(7)进行运算后,再经过限幅和低通滤波环节(Low Pass Filter,LPF)得到电感观测值Lo。采用电感观测值 Lo分别对预测模型和电感观测器的电感参数Lm进行修正。值得注意的是,所提观测算法采用预测电流与实际电流的差值对参数误差进行估计,因此,模型中的其他参数不匹配引起的电流预测误差均将最终折算到电感参数,得到统一补偿。
4.2 模型预测控制系统
图8为所提自校正MPC控制算法的控制框图。采用PI控制器进行直流母线电压控制,并给出d轴电流参考值。为实现系统单位功率因数运行,q轴电流参考值设为0。将d、q轴电流参考值经过坐标变换得到两相静止坐标系中的电流参考值。将观测器观测到的电感参数Lo补偿到电流预测模型中得到修正的电流预测模型。根据模型预测控制原理,将采集到的实时电压、电流信号通过修正后的电流预测模型,利用价值函数得到最优的开关状态作为下一时刻功率开关的控制信号。

图8 模型自校正预测控制结构框图Fig.8 Block diagram of model self-correction predictive control
5 仿真分析
为了验证所提控制算法的可行性和有效性,对图8所示系统进行仿真研究。在模型参数不准确的情况下,将传统MPC控制算法与所提自校正MPC控制算法进行比较,仿真参数见下表。

表 VSR系统参数Tab. VSR parameters
图 9为模型电感标称值 Lm从 20mH变化到 2 mH时,电感观测算法观测到的电感实际值Lo。
由图中可以看出,当模型电感标称值Lm与电感实际值Lg存在误差时,观测器可以观测出实际系统的电感值。
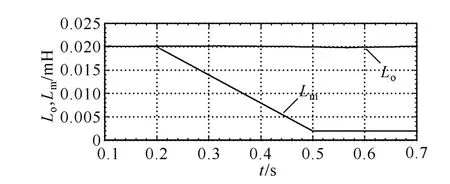
图9 标称电感值变化时电感参数观测效果Fig.9 Observation of inductance parameter with nominal inductance variations
当模型电感标称值 Lm与系统电感实际值 Lg不匹配时,采用模型自校正 MPC控制前后的三相电流波形如图10所示。

图10 电感参数不匹配时的三相电流Fig.10 Three-phase current with inductance parameter mismatch
图中,在采用模型自校正 MPC控制前,三相电流畸变较为明显。电感标称值 Lm与系统电感实际值Lg存在误差将造成MPC寻优过程出现偏差,导致 MPC得出错误的电压给定值,因此,系统实际输出并不是最优的开关状态。
采用模型自校正MPC控制前后的αβ轴电流控制效果如图11所示。

图11 电感参数不匹配时的αβ轴电流Fig.11 αβ axes current with inductance parameter mismatch
由图中可以看出,当模型电感标称值Lm与电感实际值 Lg不匹配时,α、β轴电流不能很好地跟踪给定电流值且产生畸变。当采用模型自校正 MPC控制后,电流迅速跟踪给定值且电流保持正弦。因此,模型自校正 MPC控制算法能够准确获取电感参数变化信息,并对预测模型进行补偿,可有效消除电感不匹配对控制系统的影响。
图12为采用模型自校正MPC控制前后的直流母线电压波形。
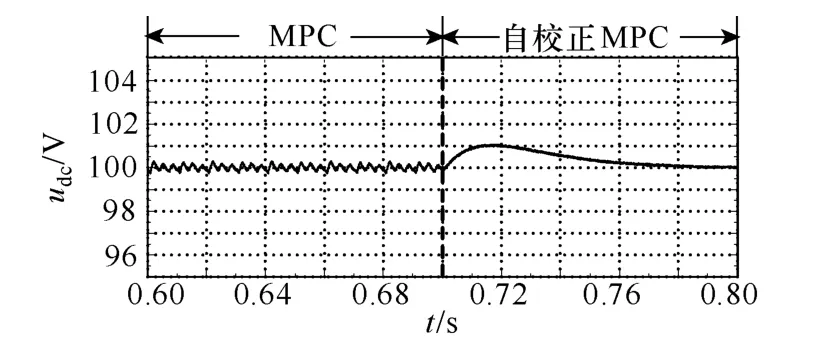
图12 电感参数不匹配时的直流母线电压Fig.12 DC voltage with inductance parameter mismatch
由图中可以看出,当模型电感标称值 Lm与电感实际值 Lg不匹配时,由于电流不能准确跟踪给定值,直流母线电压产生波动,控制效果不理想。采用模型自校正 MPC控制后,电压波动迅速消失,且能够准确跟踪给定电压信号。
6 实验验证
为了验证所提自校正 MPC控制算法的性能,构建了一套VSR系统实验平台。系统采用TI公司的TMS320F28335作为核心控制器。VSR系统通过电感值为20 mH的进线电抗器和三相变压器与电网相连。实验系统各参数与仿真参数相同。
图13为VSR模型电感标称值分别减小到10mH和2mH时,采用自校正MPC控制算法前后的三相电流波形及模型电感标称值与电感观测值曲线。

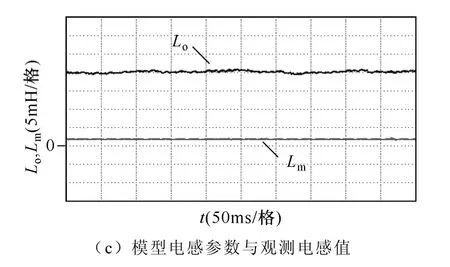
图13 电感参数不匹配时的电流实验波形Fig.13 Experimental current waveforms with inductance parameter mismatch
由图13a可以看出,电感参数不匹配降低了模型预测控制器的控制精度,导致VSR系统的三相电流产生畸变。由图13b可以看出,当电感参数不匹配程度较大时,三相电流幅值较高并产生畸变。当采用自校正模型预测控制后,电流幅值降低且正弦度较好。由图13c可以看出,当模型电感Lm变化到2mH时,观测器输出电感值Lo始终稳定在20 mH。观测器能够准确观测系统实际电感值,并实时对预测模型进行修正,提高了MPC控制的鲁棒性。
电感参数不匹配时,分别采用 MPC控制算法和自校正MPC控制算法的VSR系统输入A相电流频谱分析如图14所示。
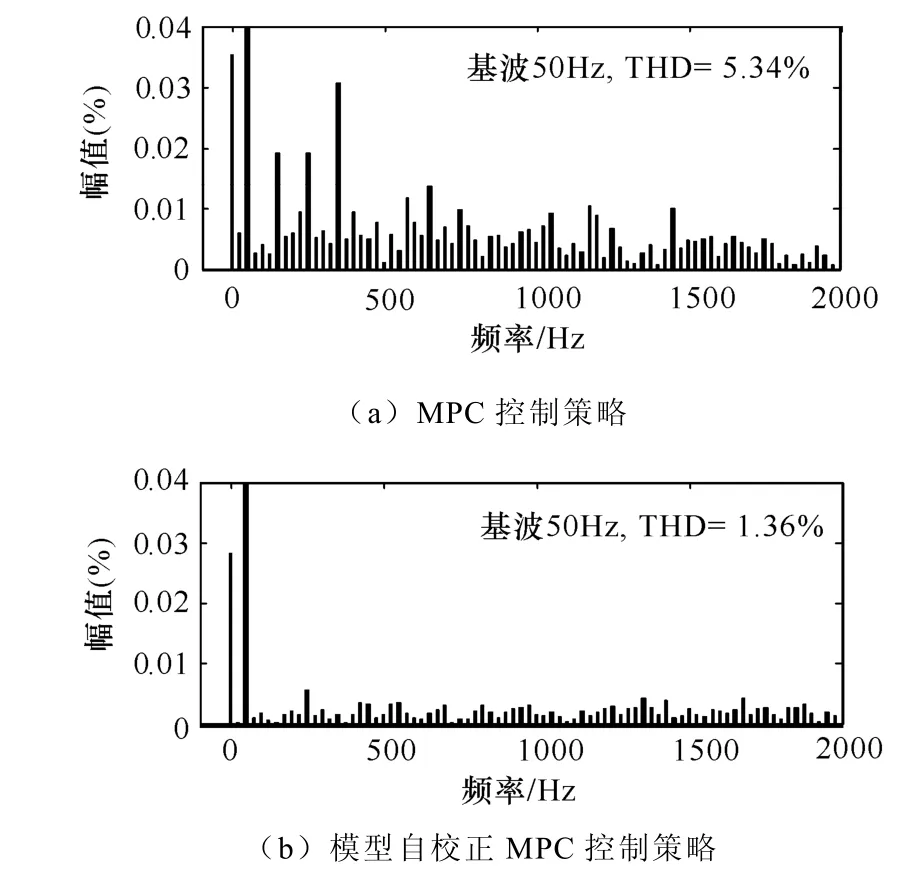
图14 两种控制策略的电流频谱分析Fig.14 Current spectrums with two different control strategies
由图14a的电流频谱分析可知,当模型电感标称值与电感实际值存在误差时,采用 MPC控制算法的VSR系统输入电流包含大量谐波。在2kHz的范围内,A相电流总谐波含量(Total Harmonic Distortion,THD)为5.34%。由图 14b的电流频谱分析可以看出,采用自校正 MPC控制算法后,输入电流谐波明显减少,A相电流总谐波含量降为1.36%。
当模型电感标称值减小到2mH时,采用MPC控制算法和自校正 MPC控制算法的 α轴电流跟踪效果如图15所示。
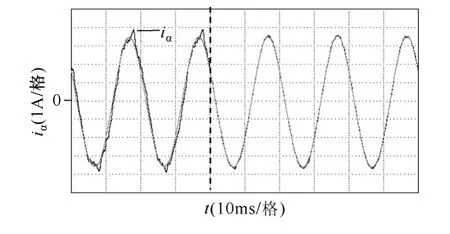
图15 电感参数不匹配时的电流跟踪实验波形Fig.15 Experimental current track waveforms with inductance parameter mismatch
由图15可以看出,由于电感参数的不匹配,电流不能精确跟踪给定值并发生畸变。当采用自校正模型预测控制算法后,电流畸变消失并准确跟踪给定值。由于算法可以对预测模型进行实时修正,确保了 MPC寻优过程的准确性,系统将输出最优的开关状态。因此,自校正模型预测控制可以有效消除模型电感参数不匹配对控制系统的影响,实验结果与仿真结果一致。
7 结论
针对 MPC控制策略受模型参数时变、不匹配等因素影响的问题,以三相VSR为例,分析了模型参数不匹配对 MPC控制系统运行的影响,提出了模型自校正 MPC控制算法。该算法结构简单、计算量小、易于实现。仿真和实验结果表明,与传统MPC控制算法相比,所提控制算法可以有效消除模型误差对控制系统的影响,实现对参考电流的准确跟踪,具有良好的控制品质和较强的鲁棒性。
[1] Lezana P, Aguilera R, Quevedo D E.Model predictive control of an asymmetric flying capacitor converter[J].IEEE Transactions on Industrial Electronics, 2009,56(6): 1839-1846.
[2] Geyer T, Papafotiou G, Morari M. Model predictive direct torque control-Part I: concept, algorithm and analysis[J]. IEEE Transactions on Industrial Electronics,2009, 56(6): 1894-1905.
[3] 杨勇, 赵方平, 阮毅, 等. 三相并网逆变器模型电流预测控制技术[J]. 电工技术学报, 2011, 26(6):153-159.Yang Yong, Zhao Fangping, Ruan Yi. Model current predictive control for three-phase grid-connected inverters[J]. Transactions of China Electrotechnical Society, 2011, 26(6): 153-159.
[4] Cortes P, Ortiz G, Yuz J I, et al. Model predictive control of an inverter with output LC filter for ups applications[J]. IEEE Transactions on Industrial Electronics, 2009, 56(6): 1875-1883.
[5] 沈坤, 章兢, 王坚. 基于预测控制的三相电压型逆变器并联系统[J]. 电工技术学报, 2012, 27(12):63-70.Shen Kun, Zhang Jing, Wang Jian. Three-phase voltage source inverters parallel system based on predictive control[J]. Transactions of China Electrotechnical Society, 2012, 27(12): 63-70.
[6] Cortes P, Rodriguez J, Silva C, et al. Delay compensation in model predictive current control of a three-phase inverter[J]. IEEE Transactions on Industrial Electronics, 2012, 59(2): 1323-1325.
[7] Løvaas C, Seron M M, Goodwin G C. Robust output-feedback model predictive control for systems with unstructured uncertainty[J]. Automatica, 2008,44(8): 1933-1943.
[8] Mariethoz S, Morari M. Explicit model-predictive control of a PWM inverter with an LCL filter[J].IEEE Transactions on Industrial Electronics, 2009,56(2): 389-399.
[9] Xia Y, Yang H, Shi P. Constrained infinite-horizon model predictive control for fuzzy discrete-time systems[J]. IEEE Transactions on Fuzzy Systems,2010, 18(2): 429-436.
[10] Xia C, Wang M, Song Z, et al. Robust model predictive current control of three-phase voltage source PWM rectifier with online disturbance observation[J]. IEEE Transactions on Industrial Informatics, 2012, 8(3):459-471.
[11] Rubagotti M, Raimondo D, Ferrara M A, et al. Robust model predictive control with integral sliding mode in continuous-time sampled-data nonlinear systems[J].IEEE Transactions on Automatic Control, 2011, 56(3):556-570.
[12] Li H, Liu S. Speed control for PMSM servo system using predictive functional control and extended state observer[J]. IEEE Transactions on Industrial Electronics,2012, 59(2): 1171-1183.
[13] Espí J M, Castello J, García Gil R, et al. An adaptive robust predictive current control for three-phase gridconnected inverters[J]. IEEE Transactions on Industrial Electronics, 2011, 58(8): 3537-3546.
[14] Antoniewicz P, Kazmierkowski M P. Virtual flux based predictive direct power control of AC/DC converters with on-line inductance estimation[J].IEEE Transactions on Industrial Electronics, 2008,55(12): 4381-4390.
猜你喜欢
纺织检测与标准(2019年2期)2019-03-24
通信电源技术(2018年5期)2018-08-23
通信电源技术(2018年5期)2018-08-23
制造技术与机床(2017年6期)2018-01-19
中国纤检(2016年10期)2016-12-13
电源技术(2015年9期)2015-06-05
电测与仪表(2015年16期)2015-04-12
电测与仪表(2014年13期)2014-04-04
电测与仪表(2014年14期)2014-04-04
组合机床与自动化加工技术(2014年12期)2014-03-01
