
六自由度机械臂运动学及工作空间分析
2015-04-26 08:24孙野殷凤龙王香丽陈忠凯冯晓
机床与液压 2015年3期
孙野,殷凤龙,王香丽,陈忠凯,冯晓
(西北核技术研究所,陕西西安 710024)
0 前言
随着计算机技术的飞速发展,机器人技术已经应用并扩展到机械设备的诸多领域,成为现代生产和高科技研究中的一个不可或缺的组成部分[1]。在具有危险性施工等科研试验或工程保障工作中,机械臂可以代替人类在现场处理爆炸物、放射性物质等,应用前景十分广阔[2]。例如在瓦斯爆炸后,如何排除井下的潜在隐患,确保救援人员安全是展开搜救工作的重要任务;在放射性污染物收集机械上需要研制机械臂去准确、可靠的控制放射性废物送达到人员不便于抵达的位置;这些未来特殊科研任务中需要的机械手臂,包含着现代机械的所有特征,并将发挥着越来越重要的作用。
针对上述需求,作者设计了一种六自由度机械臂结构,并赋予与实际相应的各种属性。根据D-H方法对其建立数学模型的,进行正向运动学分析,通过计算,验证了所建立的机械手臂的运动方程的正确性。通过采用蒙特卡洛法分析该机械臂的工作空间,并对机械臂工作域进行求解,给出了机械臂末端的工作空间点云图。结果表明,机械臂工作空间内部工作点密集且分布均匀,能够满足作业要求。在ADAMS中建立好机械臂的虚拟样机模型,并利用其强大的运动学和动力学分析功能,进行运动仿真分析。利用运动学仿真结果来验证所建立的机械手臂的运动方程的正确性,通过机械臂运动过程中基座的受力分析,得到了工作过程中的最大受力及其转角的关系,为下一步轨迹优化及力学研究做好了准备。
1 机械臂模型
1.1 机械臂三维模型
该机械臂采用SolidWorks进行建模,其模型如图1所示。该机械手臂参照人体手臂的结构,采用开链式的关节型结构,分为大臂、小臂、手腕和手爪等结构,以及能够旋转的腰关节、肩关节、肘关节、腕关节和手爪关节。机械手臂拥有6个自由度,使手臂末端执行器能实现空间中的任何位姿。
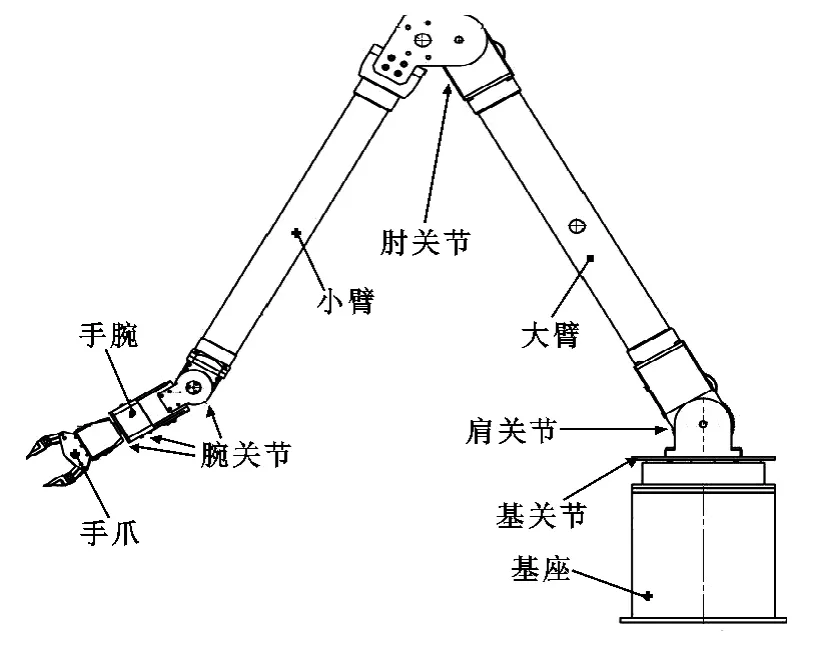
图1 机械臂模型
1.2 机械臂虚拟样机模型
将建好的机械臂三维模型导入ADAMS环境中[3-4],并赋予与实际相应的各种属性;对导入模型进行约束的定义,在各个关节添加运动副约束及驱动;将基座与地(Ground)用锁定约束进行连接,在手爪处施加相应的载荷。图2是在ADAMS中建立的机械臂虚拟样机模型。

图2 机械臂虚拟样机模型
2 机械臂运动学分析
2.1 D-H法及运动学方程
为描述手爪在空间的位置和姿态,可以在每个关节上建立一个坐标系,利用坐标系之间的关系来描述末端执行器的位置。一般采用D-H法(四参数法)[5-7]建立坐标系并推导机械臂的运动方程。
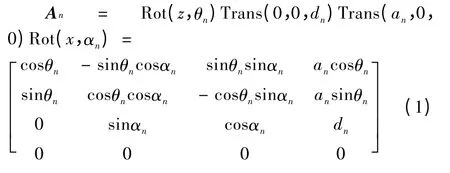
D-H法是1995年由Denavit和Hartenberg提出的一种建立相对位姿的矩阵方法。由an、αn、dn、θn4个参数描述机械臂连杆本身和相邻连杆之间的关系,从而推导出末端执行器坐标系相对于基坐标系的等价齐次坐标变换矩阵,建立机械臂的运动方程。
an和αn描述连杆本身参数,dn和θn描述相邻连杆之间的连接关系。相应两个连杆坐标系变换通式为:
要对机械臂进行分析,首先要建立坐标系。为了更能直观地表示出机械臂的构型,设定D-H表示法的各个关节变量分别是θ1=0,θ2=0,θ3=0,θ4=0,θ5=90°,θ6=0关节变量。机械臂连杆坐标系如图3所示。
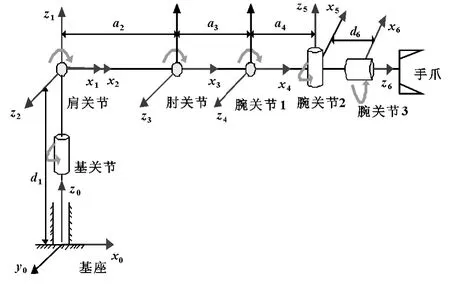
图3 机械臂连杆坐标系
由连杆坐标系统确定了连杆的D-H参数如表1所示。

表1 D-H参数
根据连杆坐标系变换通式(1)和表1参数可推导出从机械臂的坐标变换矩阵:


式中:n-1Tn表示从n-1关节开始变换到n关节的变换矩阵。
将参考坐标系设在机械臂的基座上,于是可以从基座开始变换到第一关节,然后到第二关节……,最后到末端的手爪。6R机器臂的基座和手之间的总变换为:

An为坐标系n-1到坐标系n之间的变换矩阵,P为位姿矩阵。其中
式(2)即为六自由度关节型机械臂正运动学模型的一般表达式。
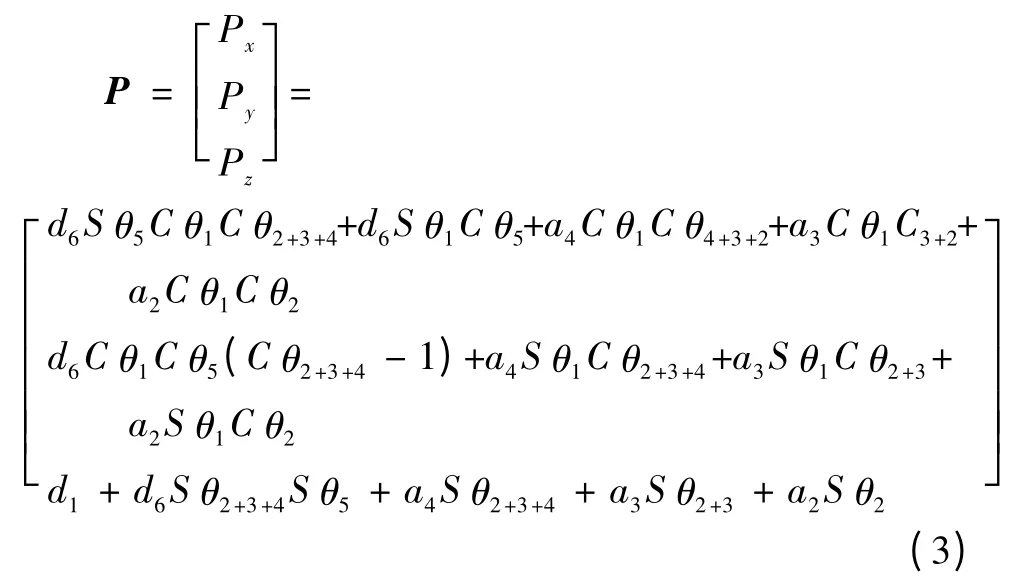
将图3所示坐标系的关节变量,即θ1=0,θ2=0,θ3=0,θ4=0,θ5=90°,θ6=0代入P,可以求出位姿矢量为:
位置关系与图2所示位置一致,说明该机械臂运动方程是正确的。
2.2 机械臂运动学仿真
为研究和考核机械臂的工作性能,在ADAMS中建立虚拟样机模型,拟定活动轨迹,然后根据机械臂的参数和基本设计指标,对机械臂虚拟样机进行运动仿真。仿真之前要先在机械臂虚拟样机上添加驱动和测量。分别控制各关节的伸展状态和摆动角度,具体各个关节角度变化如图4所示。
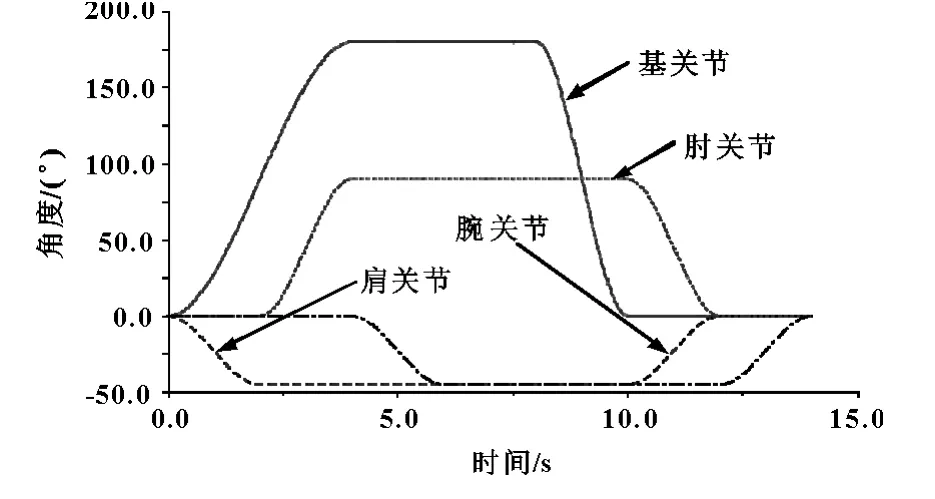
图4 各个关节角度变化图
在仿真过程中,将腕关节2、3的运动添加电机驱动并设定为0,使得关节在整个仿真过程中处于锁紧状态。在机械臂的运动过程中,对建立Marker点进行轨迹描绘,即可完成Marker点运动轨迹的跟踪和测绘,所得曲线即为机械臂虚拟模型末端执行器的工作轨迹规划曲线,如图5所示。

图5 机械臂工作轨迹曲线
手爪上的标记点设置了x、y、z方向位移的跟踪测量,图6所示为机械臂中手爪上标记点的x、y、z方向的位移曲线图。

图6 手爪x、y、z方向位移变化仿真图
从手爪位移变化曲线图中可以看到,机械手在整个轨迹运动过程中,各方向位移变化都比较平稳,无剧烈震动现象。仿真终止时手爪返回到初始位置,从而使机器臂返回到初始状态,这也符合设定要求。
为了验证仿真的可靠性,将基关节所进行的角度变化代入位姿矩阵(3),通过Matlab计算,得到机械臂运动轨迹,如图7所示。
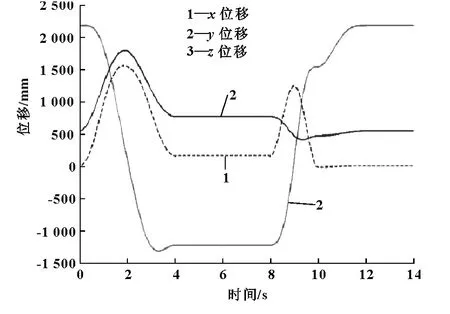
图7 手爪x、y、z方向位移变化计算结果图
由图6和图7比较可以看出,机械臂末端位姿变化轨迹规律相同,幅值大小略有差别但基本相同。通过虚拟模型仿真和运动学计算结果对比,再一次验证了所建立的位姿矩阵的正确性。
3 机械臂工作空间分析
3.1 六自由度机械臂工作域
机械臂的工作域即机械臂末端执行器可达的空间位置。如果将6自由度机械臂工作域记作W(P)。则关节变量与工作域的映射可表示为:

其中,θ=[θ1,θ2,θ3,θ4,θ5,θ6]T为关节变量;Q为关节空间变量,也称约束空间。实际应用中,机械臂关节活动范围主要受结构、自身连杆位置关系、外部安装条件等的限制。因此,Q不能随意取值,应考虑实际应用情况确定约束空间,即:


3.2 基于蒙特卡洛法的机械臂工作域求解
在计算机上用蒙特卡洛方法计算多关节机械臂的工作域,其原理是式(4),实质是对关节变量通过均匀分布赋以一定数量的符合关节变化要求的随机量,并对各关节变量进行组合,利用机械臂的正向运动学方程式(3)计算出机械臂末端执行器端点的坐标值,这些坐标值构成的集合为机械臂工作域[8-10]。
仿真利用Matlab软件编程实现。编程算法以机械臂的一个关节变量θ1为例,首先在[0,1]区间生成n个随机点Rand,然后根据θ1的活动范围,则有,其中i表示n中第i个随机值。同理,对机械臂的其他关节变量也赋予数目相同的随机值。
仿真计算中,六自由度机械臂构型各个参数如下:

图8 六自由度机械臂末端可达空间
从图8可以看出,该机械臂几乎可以到达最大区域内的所有空间。利用蒙特卡洛方法仿真获得的是机械臂工作域中一系列随机点的云图,其与机械臂实际的工作域还存在一定的误差。这是由于蒙特卡罗方法本身的限制,仿真得到的机械臂工作域只能是逼近实际工作域的近似工作域,逼近程度则取决于随机选取的各关节变量的组合数量,组合越多算出的坐标值数目也越多,也就越能精确地反映械臂的工作域。
4 机械臂动力学分析
4.1 转角与位移关系
对机械臂基关节的回转运动、肩关节、肘关节和手腕摆动关节建立角度(Angle)测量,输出角度变化曲线和Marker点笛卡尔坐标值变化曲线。通过仿真可建立各个关节运动与Marker点位移变化的关系曲线。如图9所示。
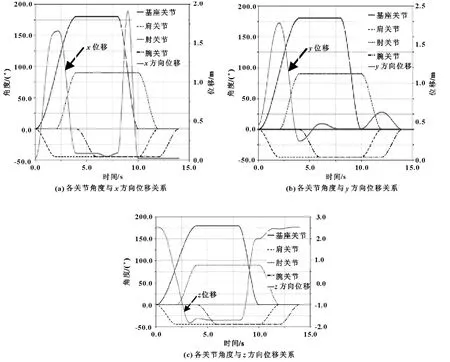
图9 关节角度与Marker点位移变化的关系曲线
图9反映了在仿真时间内任一时刻机械臂末端的位姿与各关节转角的关系,同时也反映出了机械臂末端相对于基座坐标系移动的位移在3个坐标轴上的投影关系。从图中可以看出,机械臂末端的位姿与机械臂各个关节存在耦合关系,其中,基关节和肩关节角度变化相比较肘关节和腕关节而言,对机械臂末端位移的变化影响要显著一些。
4.2 机械臂稳定性及受力
机械臂基座需要固定在其他机构上(比如移动平台),因此求解基座在工作过程中所受力与力矩显得十分重要。当机械臂末端加持重物返回时,末端会增加质量,因此在末端Marker点处添加大小为10 N力,模拟负载质量。
图10为基座总体受力情况和基座受力在各个坐标轴上的投影。
由图10可以看出,基座最大受力超过280 N,远大于末端负载。基座所受力基本在y方向,其他方向受力基本可以忽略不计。

图10 基座所受力变化曲线
图11为基座所受力矩与关节角度变化曲线。从图11可以看出,末端执行器移动速度越快,基座承受的力矩越大。各个关节角速度和末端执行器移动速度对力矩曲线的平稳性影响明显,且基本成正比。在末端执行器位移方向改变处,基座所受力矩最大。

图11 基座所受力矩与各个关节角度变化曲线
5 结束语
通过运动学分析,获得了六自由度机械臂末端执行器的位姿矩阵,并且通过计算和仿真验证了该位姿矩阵的正确性。
由蒙特卡洛法分析该机械臂的工作空间分析结果可以看出,该机械手工作空间内部工作点分布均匀,可以满足机械臂的使用需求。蒙特卡洛法具有计算工作量小、精度高、求解速度快的优点,克服了几何分析法受到自由度限制的缺陷,且能够准确显示机械手工作空间的边界,在当前计算机计算速度越来越快的情况下,具有很好的应用前景。
通过研究可以看出,空间多自由度机械臂的运动学和动力学问题的解析分析比较复杂和困难,而掌握虚拟样机仿真环境进行仿真分析,可以有效地指导机械臂的设计和控制系统编程。机械臂大臂处在运动链起始端,控制灵敏度相对较高;机械臂关节的角速度越快,所需的驱动力矩就越大,力矩曲线的平稳性也将变差;通过机械臂运动过程中基座的受力分析,得到了工作过程中的最大受力及其转角的关系,为下一步轨迹优化及力学研究做好了准备。
[1]王殿君,刘淑晶,赵化启.机械手可达空间的仿真技术研究[J].机床与液压,2006,34(2):205-210.
[2]曾孔庚.工业机器人技术发展趋势[J].机器人技术与应用,2006(6):10-13.
[3]王国权.虚拟试验技术[M].北京:电子工业出版社,2004.
[4]王国强,张进平.虚拟样机技术及其在ADAMS上的实践[M].西安:西北工业大学出版社,2002.
[5]熊有伦,丁汉,刘恩沧.机器人学[M].北京:机械工业出版社,1995.
[6]NIKU Saeed B.Introduction to Robotics:Analysis,Systems,Application[M].USA:Pearson Education,2001.
[7]NIKU Saeed B.机器人学导论[M].孙富春,朱纪洪,刘国栋,等,译.北京:电子工业出版社,2004.
[8]周友行.多关节凿岩机器人工作空间的数值解法[J].凿岩机械气动工具,2006,32(3):48-51.
[9]曹毅,土树新,李群智.基于随机概率的机器人工作空间及其解析表达[J].组合机床与自动化加工技术,2005,47(2):1-4.
[10]RASTCGAR J,FARDANESH B.Manipulator Work Analysis Using the Monte Carlo Method[J].Mechanism&Machine Theory,1990,25(2):233-239.
猜你喜欢
防爆电机(2021年2期)2021-06-09
模具制造(2019年7期)2019-09-25
船舶标准化工程师(2019年4期)2019-07-24
电子制作(2018年24期)2019-01-03
测控技术(2018年12期)2018-11-25
制造技术与机床(2017年9期)2017-11-27
荣誉杂志(2017年7期)2017-08-23
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
机械工程师(2014年12期)2014-12-23
