
主被动调谐控制结构动力响应分析与试验*
2015-06-09 12:36刘彦辉周福霖闫维明
振动、测试与诊断 2015年3期
刘彦辉, 谭 平, 周福霖,, 闫维明
(1.广州大学减震控制与结构安全国家重点实验室(培育) 广州,510405)
(2.北京工业大学建筑工程学院 北京,100124) (3.多伦多大学土木工程系 加拿大,多伦多,M5S1A4)
主被动调谐控制结构动力响应分析与试验*
刘彦辉1,2,3, 谭 平1, 周福霖1,2, 闫维明2
(1.广州大学减震控制与结构安全国家重点实验室(培育) 广州,510405)
(2.北京工业大学建筑工程学院 北京,100124) (3.多伦多大学土木工程系 加拿大,多伦多,M5S1A4)
针对地震和风振下结构的振动控制,提出了结构主被动复合调谐控制的策略,以及采用直线电机驱动主动质量阻尼器(active mass damper,简称AMD)、中空橡胶隔震支座作为调谐质量阻尼器(tune mass damper,简称TMD)弹性单元、滑轨作为TMD支撑轨道的主被动复合调谐控制装置实现方法,进行了主被动复合调谐控制对结构动力响应控制的效果及减震机理分析,探讨了反馈响应向量对控制效果、AMD控制力和AMD位移的影响,完成了线性二次高斯算法(linear quadratic Gaussian,简称LQG)控制算法和H2/H∞控制算法时的主被动复合调谐控制结构振动台试验。研究结果表明:结构主被动复合调谐控制能有效减小结构的动力响应,改善TMD的性能;采用直线电机驱动的AMD作为主动控制装置,为防止AMD“飘移”,AMD位移应作为目标向量和反馈响应;LQG控制算法总体控制效果优于H2/H∞控制算法。试验验证了提出的主被动复合调谐控制硬件系统方案的可行性,为工程应用提供了支撑。
复合调谐控制; 振动控制; 主动质量阻尼器; 调谐质量阻尼器; 控制算法
引 言
近年来,随着经济的快速发展,世界各地兴建了大量的高层建筑、超高层建筑、电视塔等高耸结构,特别是城市的地标性建筑已经成为城市经济实力的象征。如何保证这些高层、超高层、高耸结构地震作用下的安全性以及强风作用下的舒适性和安全性已经成为需要迫切解决的关键问题。大量的研究与工程实践表明,结构振动控制技术可改变结构的动力特性,减小结构的风致振动和地震响应,提高其抗风抗震性能,而结构主被动复合调谐控制技术具有主动控制的自适应性以及被动控制的无条件稳定性与可靠性,已成为国内外结构振动控制领域研究的热点课题。
目前,国内外对主被动复合调谐控制系统进行了一系列的研究。Lu等[1]对AMD和被动阻尼器组成的复合调谐质量阻尼器进行了研究。Nagashima等[2]对安装在实际36层钢结构上的复合调谐质量阻尼器的性能进行了研究,结果表明复合调谐控制对结构摆动和扭转具有良好的控制效果。Fujinami等[3]对安装由旋转电机驱动的AMD摆式复合调谐质量阻尼器的一栋100 m钢框架办公楼的减震性能进行了研究。Watakabe等[4]探讨了复合调谐控制系统中AMD、弹簧和黏滞阻尼器对复合调谐质量阻尼的减震效果的影响。Saito等[5]研究了安装伺服电机和隔震支座组成的复合调谐质量阻尼器的一栋200 m高钢框架结构的减震性能,结果表明顶部加速度均方差可减小25%~50%。Nakamura等[6]对安装在由伺服电机驱动的AMD、线性弹簧和黏滞油阻尼器组成的复合调谐质量阻尼器的93 m钢框架混凝土核心筒结构的减震性能进行了研究,当控制力超过伺服电机的最大力时,系统将转到被动控制模式成为TMD。Fisco等[7]对复合控制调谐阻尼器的主要特性进行了分析。欧进萍等[8-9]对AMD、线性弹簧和阻尼器组成的混合调谐质量阻尼器的参数设计进行了研究。吕西林等[10]对装有悬吊式复合调谐质量阻尼器的492 m上海环球金融中心的减震效果进行了研究,结果表明复合控制将整体结构的阻尼比提高8倍左右,结构风振响应减小到60%以下。安方等[11]对基于速度-加速度时滞反馈的振动控制系统控制算法进行了研究。笔者所在课题组提出了一种在TMD上设置直线电机的AMD新型的主被动混合控制系统(HMD),目前已成功应用于广州塔的风振控制[12-15]。
笔者针对提出的结构主被动复合调谐控制的策略,提出了采用直线电机驱动AMD、中空橡胶隔震支座作为TMD弹性单元、滑轨作为TMD支持轨道的主被动复合调谐控制装置实现方法,并进行了地震和模拟风振作用下LQG控制时主被动复合调谐控制对结构动力响应控制的控制效果及减震机理分析,以及LQG和H2/H∞控制算法时的主被动复合调谐控制结构地震模拟振动台试验。分析和试验结果表明,复合调谐控制技术具有良好的减震效果,验证了提出的主被动复合调谐控制硬件系统方案完全可行,为工程应用提供了支撑。
1 新型主被动复合控制系统及动力模型
新型主被动复合控制系统(hybrid mass damper,简称HMD)是在被动调谐装置(TMD)上再设置一小质量的主动调谐系统(AMD),从形式上看是双层调谐质量在运动。它通过小质量块的快速运动产生惯性力来驱动大质量块的运动,从而抑制主体结构的振动。当主动调谐控制系统失效时,变为被动调谐质量阻尼器(TMD),因此具有fail-safe的功能。AMD控制装置绝大多数是依靠液压驱动或者是伺服电机马达驱动,液压系统构造复杂,需要空间大,能源利用效率降低,需要定期换油,维护成本高,运行时噪音大,这些问题在一定程度上限制了液压驱动型AMD控制系统的应用。旋转伺服电机虽然对液压驱动作了一些改进,但由于它需要借助于机械传动部件(滚珠丝杠)等中间环节,存在响应慢、难以获得更高的加速度、控制精度低等问题,一直影响其在实际工程中的应用。随着大驱动力直线电机的出现,笔者提出了把AMD质量与直线电机作成一体化结构,形成直线电机驱动的AMD。在被动TMD控制装置方面,目前主要采用悬吊式TMD或支撑式TMD。当采用悬吊式TMD时,由于悬摆较长,且需要设置阻尼器,通常需要较大的空间才能实现;当采用支撑式TMD时,其弹性元件通常用弹簧提供刚度,需要弹簧的长度较长,造成设计的支撑装置较大,引起控制装置造价大幅上扬。因此,笔者提出了中空橡胶隔震支座(具有较好的线性刚度)作为TMD弹性单元、双向导轨作为TMD支撑的复合控制系统硬件实现策略。提出的新型主被动复合控制系统如图1所示。

图1 新型主被动复合控制装置Fig.1 Innovative hybrid control device
设多自由度结构在顶层安装了HMD控制系统,则结构在HMD控制下的控制系统运动方程可以表示为
(1)

M,C,K分别为
其中:mi为结构第i层的质量;kij和cij分别为结构的刚度和阻尼系数;mt和ma分别为TMD和直线电机驱动AMD动子的质量;ct和ca分别为TMD和AMD的阻尼系数;kt和ka分别为TMD和AMD的刚度。
HMD系统AMD中并没有设置刚度和阻尼单元进行直接传力,亦即Ca和Ka应取为零,但考虑到数值仿真计算的收敛、TMD轨道的摩擦力,以及设置在TMD上的直线电机驱动AMD的定子和动子之间轨道的摩擦力,需要将Ka设置成一个较小的数值以及将摩擦力等效转化为关于阻尼系数Ca的表达式。
将受控结构运动方程用状态空间方程来表达
(2a)
(2b)
选择输出向量y为结构层间位移、TMD相对顶层的位移、AMD相对TMD的位移以及结构、TMD和AMD的绝对加速度。因此, 输出矩阵为

其中:G为能输出相对位移的变换矩阵。
2 HMD振动控制仿真及参数分析
仿真模型为单自由度体系,结构的质量、刚度和阻尼系数分别为3 200 kg,880 kN/m和3 183.9 (N·s)/m,TMD的质量和刚度分别为200 kg和190 kN/m,TMD的阻尼系数为1 547.3 (N·s)/m,AMD质量为70 kg(动子质量为45 kg,定子质量为25 kg)。考虑到数值仿真的收敛性,令AMD的刚度和阻尼系数均为0.01,由于仿真的目的是检验主被动复合控制的有效性以及能改善TMD的频率敏感性,因此仿真的TMD性能参数不是最优参数。分别进行无控结构、TMD控制结构及HMD控制结构在外部激励下的动力响应分析,控制算法采用LQG,输入地震波分别为Kobe地震波、EI Centro地震波、Taft地震波。为了模拟风荷载对结构的作用,对结构输入合成谐波,其根据正弦扫频波扫频得到的结构频率2.56 Hz进行合成,合成谐波的计算公式为


(3)
其中:a为合成的谐波;t为时间;A根据合成谐波的峰值进行调整,持续时间为40 s。
2.1 动力响应分析
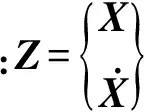
LQG控制时控制目标向量为结构位移、结构绝对加速度和AMD冲程,反馈向量为结构绝对加速度、TMD绝对加速度和AMD冲程。通过反馈向量,估计结构的全状态进行控制。图2及图3分别为Kobe地震波作用下结构的位移和加速度响应,表1为各工况下结构最大响应及最大控制力。从图2、图3及表1 可以看出,采用HMD控制,无论是模拟的风荷载及实际的地震作用,结构的位移响应和加速度响应均有较大程度的减小,对实际地震波作用下的结构最大位移和最大加速度响应平均值减小为原结构的78%和73%,对加速度响应的控制优于对位移响应的控制,对模拟的风荷载作用下的结构位移和加速度响应峰值减小为原结构的25%和24%,HMD对风荷载下的控制效果优于对地震作用下的控制效果。同时可以看出,TMD对模拟的风荷载作用下的结构响应比较有效,而对于地震作用下,有些地震波有效,而在某些地震波作用下,甚至放大结构的响应,控制效果与地震激励有关。由此可见,在TMD上设置AMD形成的HMD大大改善了TMD的性能,无论是风荷载或是地震作用下,都有良好的控制效果。图4和图5分别为合成谐波和Kobe地震波作用下的AMD控制力与结构层位移关系图。可以看出,在合成谐波作用下,曲线比较饱满,说明HMD耗能能力比较强,这从机理上说明HMD对风荷载下的控制效果优于对地震作用下的控制效果。

图2 结构位移响应(Kobe地震波)Fig.2 Displacement response of structure (Kobe)

图3 结构加速度响应(Kobe地震波)Fig.3 Acceleration response of structure (Kobe)

图4 控制力与结构层位移关系(合成谐波)Fig.4 Relation of deformation to control force (Harmonic)
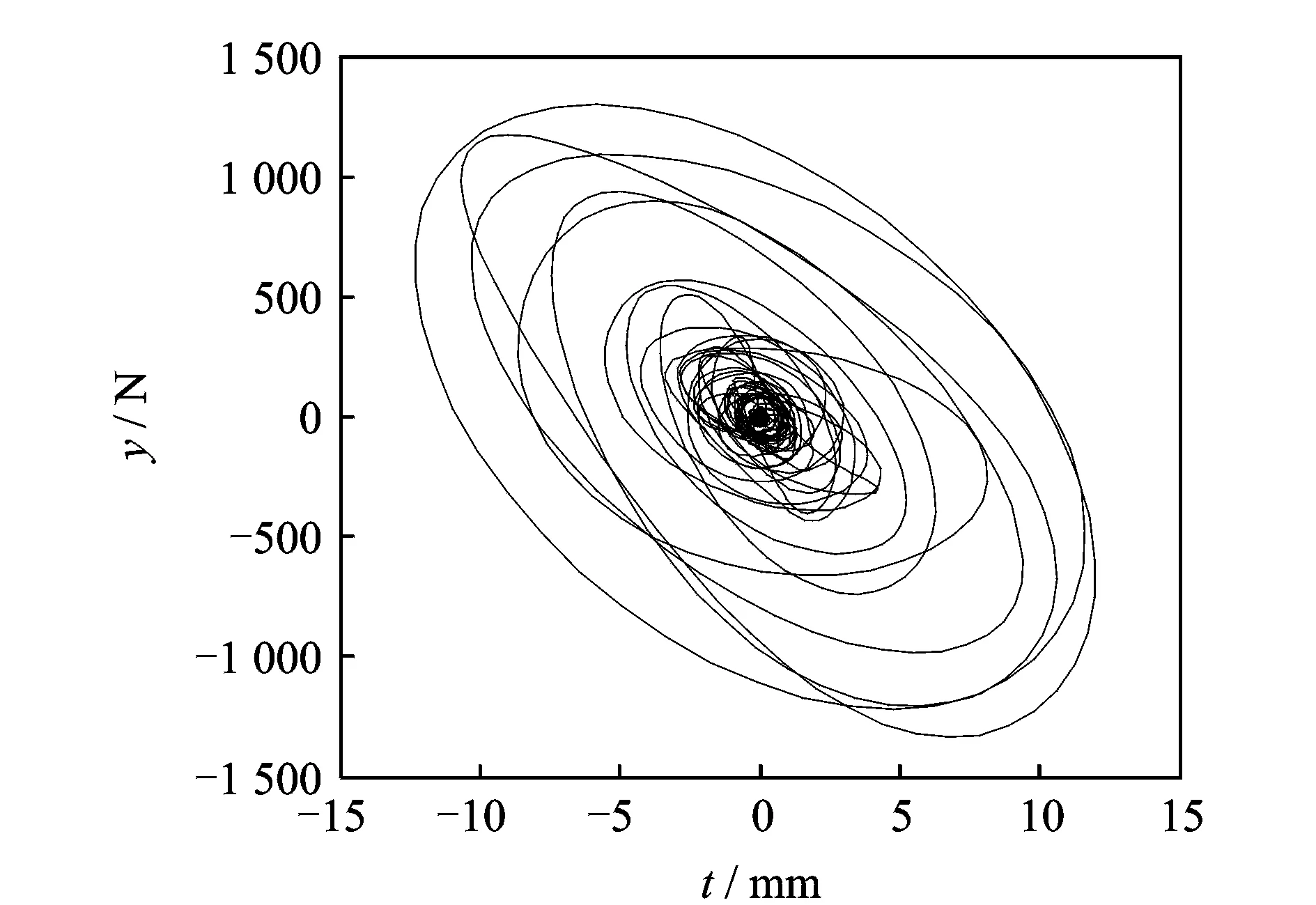
图5 控制力与结构层位移关系(Kobe地震波)Fig.5 Relation of deformation to control force (Kobe)
Kobe地震波作用下AMD位移响应如图6中工况1曲线,AMD的位移响应在HMD控制中是比较重要的控制内容,关系到在实际工程中AMD装置的实现问题及造价;因此,要求AMD持续工作时应无“漂移”现象,以及最大位移在AMD设计时能够实现。从图6中工况1曲线可以看出,AMD位移基本没有“漂移”。
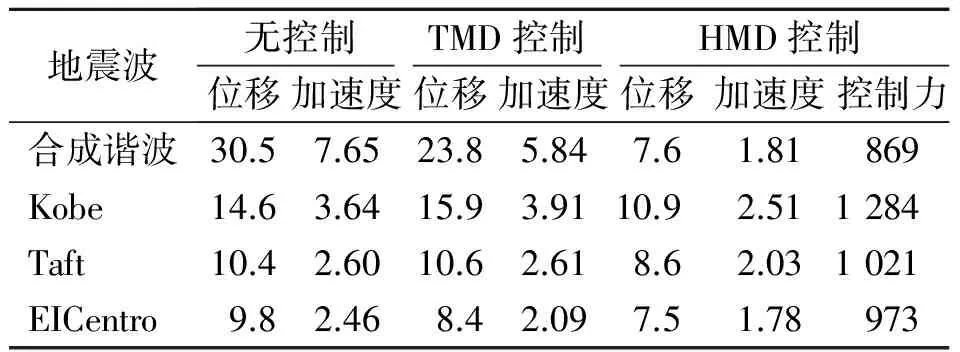
表1 各工况下结构最大响应及最大控制力
2.2 反馈响应向量参数分析

图6 AMD位移响应(Kobe,有摩擦力)Fig.6 AMD displacement (Kobe, with friction)

图7 结构加速度响应(Kobe,无摩擦力)Fig.7 Structure acceleration (Kobe, without friction)

图8 AMD位移响应(Kobe,无摩擦力)Fig.8 AMD displacement (Kobe, without friction)
由于结构加速度是主要反馈向量,进行参数分析时采用3种工况:工况1反馈向量同2.1节;工况2反馈结构绝对加速度、TMD绝对加速度;工况3反馈结构绝对加速度和AMD冲程。图7和图8分别为工况Kobe地震波作用下结构加速度与位移响应,为了显示清晰,只取主要振动段的响应。由图可以看出,在理想条件下采用不同的反馈量,结构的加速度响应控制效果基本一样,这主要是因为通过LQG控制时根据不同的反馈量估计结构的全状态是一样的,因此控制效果基本一致,而且AMD位移响应也基本一致。然而在实际工程应用中,AMD不可避免地存在摩擦力,因此,有必要研究AMD轨道存在摩擦力情况下,不同反馈响应的控制效果及AMD位移。分析时假定摩擦力模型为
(4)

图9和图6分别为在AMD轨道存在摩擦力情况下Kobe激励下各工况的结构加速度和AMD位移响应。从图9和图6可以看出,在有摩擦力情况下,不同反馈时对结构加速度响应控制基本一样,说明不同的反馈量对结构响应的控制效果是一样的,但是有摩擦力情况下采用不同反馈时,AMD位移响应有较大的区别。从图6可以看出,当采用AMD位移反馈时,摩擦力对AMD位移影响比较小,基本没有“漂移”现象;而没有采用AMD位移反馈时,AMD位移有很大的“漂移”。这对结构主动控制是很不利的,特别是长期风振实时控制时,AMD会“漂移”到限位的位置,AMD将失效,失去对结构的控制。因此在进行HMD主动控制时,AMD位移应作为主要的反馈量之一。

图9 结构加速度响应(Kobe,有摩擦力)Fig.9 Structure acceleration (Kobe, with friction)
3 HMD振动控制试验
3.1 试验模型
设计试验受控结构模型参数同第2节仿真模型,用总质量约为3 200 kg的钢筋混凝土质量块模拟受控结构的质量,底部放置4个无铅隔震支座以模拟结构的刚度。TMD的导轨以及用来模拟其刚度的两个中空隔震支座将受控质量块和钢板(TMD质量)连接起来。钢板与AMD的基座(定子)相连,如图10所示。直线电机驱动的AMD参数如下:最大出力为±3 kN;额定出力为±1 kN,最大行程为±350 mm;最大速度为±3 m/s;动子质量约为45 kg;定子和基座质量约为70 kg。

图10 试验模型Fig.10 Experimental model
3.2 HMD振动控制试验系统与工况
进行实时控制时,振动控制算法采用LQG和h2/h∞控制算法。通过振动台对模型进行激振,由传感器测量得到模型的响应,输入到DSpace系统,经A/D转换、控制算法在线实时计算控制力,再经D/A转换,传输到TwinCAT I/O的EL3102,TwinCAT系统接收到此信号并传输给工控机,再由工控机直接驱动直线电机(AMD)。直线电机驱动的HMD控制试验系统框图如图11所示。

图11 试验系统框图Fig.11 Block Diagram of the Experiment System
振动台输入激励同第3节激励。首先,固定TMD与AMD,进行4种激励下的无控结构的振动台试验;然后,放开TMD,固定AMD,进行4种激励下的TMD控制的振动台试验;最后,放开TMD与AMD,进行4种激励下两种控制算法时的HMD振动控制试验。
3.3 试验结果与分析
表2为各工况下主结构的动力响应,图12及图13分别为Kobe地震波下各工况的结构加速度响应(Kobe地震波下的响应取主要振动时段)和结构位移响应。由表2、图12和图13可以看出,各工况下HMD控制的结构位移和加速度响应得到有效的控制,特别是对于合成谐波结构位移和加速度响应峰值分别减小为无控结构的44.7%和54.0%。但TMD控制对输入激励特性比较敏感,有时会对结构的位移响应和加速度响应控制不起作用。在TMD上设置AMD形成HMD控制后,试验结果同仿真结果一致,HMD大大改善了TMD的性能,无论是风荷载或是地震作用下,都有良好的控制效果。同时可以看出,LQG控制算法的控制效果优于h2/h∞控制算法,且控制力小于h2/h∞控制算法。

表2 各工况下结构响应最大值

图12 Kobe地震波下结构加速度(试验结果)Fig.12 Structure acceleration (Kobe, experimental result)
图13 Kobe地震波下结构位移(试验结果)Fig.13 Structure displacement (Kobe, testing result)

图14 Kobe地震波下控制力时程(LQG算法)Fig.14 Control force (Kobe, LQG)
图14为Kobe地震波下HMD控制时AMD控制力时程,各工况下AMD最大控制力见表2。图14中,实际的驱动力为AMD加速度与AMD质量相乘,为实际作用在结构上的控制力。完成的驱动力为AMD工控机反馈的控制力,该驱动力为实际的驱动力、纹波推力与轨道摩擦力之和。由图15可以看出,完成的驱动力与实际驱动力基本一致,说明AMD能准确地执行主动力,且AMD的纹波推力及轨道摩擦力相比可不考虑,其他激励下完成的驱动力与实际驱动力特性同Kobe地震波。试验时限制AMD最大出力为±1 kN。由表2可以看出,在Taft和扫频波作用下,h2/h∞控制算法在各种激励时控制力均达到饱和,而LQG控制算法仅在EI Centro地震波时控制力达到饱和。
4 结 论
1) 提出的采用直线电机驱动AMD、中空橡胶隔震支座作为TMD弹性单元、滑轨作为TMD支撑轨道的主被动复合调谐控制装置对结构的动力响应有较好的控制效果,整套控制装置切实可行。
2) 主被动复合控制系统能有效改善TMD系统的性能,在不同的输入激励下,HMD控制系统控制效率比较稳定,无论是结构加速度响应或者是位移响应,均能得到较好的控制。HMD对风振作用时的控制效果优于对地震作用时的控制效果。
3) 采用直线电机驱动的AMD作为主动控制装置,为了防止“飘移”,AMD应为目标向量和反馈响应。试验结果表明,HMD控制时LQG控制算法总体控制效果优于H2/H∞控制算法。
[1] Lu L Y, Lin G L, Lin C H. A unified analysis model for energy dissipation devices used in seismic-resistant structures[J]. Computer-Aided Civil and Infrastructure Engineering, 2009,24(1):41-61.
[2] Nagashima I, Maseki R, Asami Y, et al. Performance of hybrid mass damper system applied to a 36-story high-rise building[J]. Earthquake Engineering and Structural Dynamics, 2001,30(11):1615-1637.
[3] Fujinami T, Saito Y, Masayuki M, et al. A hybrid mass damper system controlled by H∞control theory for reducing bending-torsion vibration of an actual building[J]. Earthquake Engineering and Structural Dynamics, 2001,30(11):1639-1653.
[4] Watakabe M, Tohdo M, Chiba O, et al. Response control performance of a hybrid mass damper applied to a tall building[J]. Earthquake Engineering and Structural Dynamics, 2001,30(11):1655-1676.
[5] Saito T, Shiba K, Tamura K. Vibration control characteristic of a hybrid mass damper system installed in tall buildings[J]. Earthquake Engineering and Structural Dynamics, 2001,30(11):1677-1696.
[6] Nakamura Y, Tanaka K, Nakayama M, et al. Hybrid mass dampers using two types of electric servomotors: AC servomotors and linear-induction servomotors[J]. Earthquake Engineering and Structural Dynamics, 2001,30(11):1719-1743.
[7] Fisco N R, Adeli H. Smart structures: part II—Hybrid control systems and control strategies[J]. Scientia Iranica, Transactions A: Civil Engineering, 2011,18(3):285-295.
[8] 欧进萍.结构振动控制——主动、半主动和智能控制[M].北京:科学出版社,2003:186-235.
[9] 李宏男.结构多维减震控制[M].北京:科学出版社,2008:433-450.
[10]吕西林,李培振,郭献群,等.上海环球金融中心大厦振动控制及现场实测分析[J].结构工程师,2009,25(4):63-70.
Lü Xilin, Li Peizhen, Guo Xianqun, et al. Vibration control and site measurement on Shanghai World Financial Center Tower[J]. Structural Engineers, 2009,25(4):63-70. (in Chinese)
[11]安方,陈卫东,绍敏强.基于速度-加速度时滞的振动主动控制[J].振动、测试与诊断,2012,32(3):364-370.
An Fang, Chen Weidong, Shao Minqiang. Active vibration control based on time-delayed velocity acceleration feedback[J]. Journal of Vibration, Measurement & Diagnosis, 2012,32(3):364-370. (in Chinese)
[12]Fu Linzhou, Tan Ping, Liu Yanhui, et al. Hybrid mass dampers for canton tower[J]. International Journal on Tall Buildings and Urban Habitat, 2012(1):24-29.
[13]刘彦辉,谭平,周福霖,等.直线电机驱动的AMD性能测试试验研究[J].土木工程学报,2010,43(12):50-56.
Liu Yanhui, Tan Ping, Zhou Fulin, et al. Experiment investigation of AMD performance driven by linear motor[J]. China Civil Engineering Journal, 2010,43(12):50-56. (in Chinese)
[14]Tan Ping, Ning Xiangliang, Zhang Ying, et al. Application of hybrid mass dampers for vibration control of guangzhou tv and sightseeing tower[C]∥11th World Conference on Seismic Isolation, Energy Dissipation and Active Vibration Control of Structures. Guangzhou: [s.n.], 2010.
[15]刘彦辉.结构主被动混合质量阻尼器控制理论与试验研究[R].北京:北京工业大学,2011.

10.16450/j.cnki.issn.1004-6801.2015.03.006
*国家重点基础研究发展计划(“九七三”计划)资助项目(2012CB723304);广州市珠江科技新星资助项目(2014J220058);国家自然科学基金资助项目(51478131,51408142);“十二五”科技支撑计划资助项目(2012BAJ07B02)
2013-11-06;
2013-12-18
TU352.1; TH113
刘彦辉,男,1980年7月生,博士后、副研究员、硕士生导师、国家一级注册结构工程师。主要研究方向为结构振动控制的研究。曾发表《直线电机驱动的AMD性能测试试验研究》(《土木工程学报》2010年第43卷第12期)等论文。 E-mail:Liuyanhui2012@163.com
猜你喜欢
施工技术(中英文)(2022年9期)2022-06-21
建材发展导向(2022年5期)2022-04-18
广东建材(2022年3期)2022-04-13
辽宁师专学报(自然科学版)(2021年1期)2021-07-21
家庭影院技术(2020年6期)2020-07-27
制造技术与机床(2017年6期)2018-01-19
北京航空航天大学学报(2017年1期)2017-11-24
振动工程学报(2016年2期)2016-07-20
商场现代化(2016年12期)2016-06-06
企业导报(2016年10期)2016-06-04
