
一种地地导弹变射面飞行程序设计方法
2016-01-06 03:53肖龙旭,王继平,魏诗卉等
弹道学报 2015年2期
关键词:弹道导弹
一种地地导弹变射面飞行程序设计方法
肖龙旭,王继平,魏诗卉,林红斌
(第二炮兵装备研究院,北京 100094)
摘要:传统地地弹道导弹一般只进行俯仰飞行程序设计,所采用的设计模型与方法不能适应变射面飞行程序的设计。针对此问题,在射面转移变换规划的基础上,提出了一种地地导弹变射面飞行程序设计方法,在假设地球为圆球的情况下,建立射面变换飞行程序优化模型,采用hp-RPM伪谱法进行优化设计;对优化出的离散俯仰/偏航飞行程序数据进行多项式拟合平滑,并建立地球扁率影响修正模型进行修正,最终确定了射面变换俯仰/偏航飞行程序。仿真计算结果表明,优化出的变射面飞行程序有效、可行,证明了设计方法的正确性。
关键词:弹道导弹;变射面;飞行程序;hp-RPM伪谱法
中图分类号:TJ761.3文献标识码:A
收稿日期:2014-12-02
基金项目:中国博士后科学
作者简介:常思江(1983- ),男,讲师,博士,研究方向为弹箭飞行与控制及外弹道理论。E-mail:ballistics@126.com。
A Design Method of Changeable Launching Plane Flight-process of Ground-to-ground Ballistic Missiles
XIAO Long-xu,WANG Ji-ping,WEI Shi-hui,LIN Hong-bin
(The Second Artillery Equipment Institute,Beijing 100094,China)
Abstract:Aiming at the traditional ground-to-ground ballistic missiles,the design of the pitching flight process is only carried out in general,but the design model and method adopted can not adapt the design of the flight process of the changeable launching plane.Based on the launching-plane transform planning,the design method of the changeable launching plane flight process of ground-to-ground missiles was put forward.Under the assumption that the earth is a pellet,the optimal flight process design model of the launching plane transform was established,and the optimal design was carried out by adopting hp-adaptive pseudospectral method.The optimized discrete data of pitching and yawing flight-process was fitted,and the influence of the earth oblate rate was revised by establishing the model.The pitching and yawing flight process was determined.The simulation result shows that the optimized changeable launching plane flight-process is valid,and the design method is correct.
Key words:ballistic missile;changeable launching plane;flight process;hp-adaptive pseudospectral method
传统的地地弹道导弹近似在发射点、目标点、地心构成的射面内飞行,在突防能力、横向机动能力、射程覆盖能力方面存在诸多的限制。为此,文献[1]提出了一种地地导弹变射面飞行策略和射面变换(也称弹道面转移变换)规划方法,利用椭圆弹道理论,优选射面变换夹角以及各射面弹道参数,为导弹各级助推段俯仰/偏航飞行程序设计提供了约束基准,优化了导弹发动机能量运用,接下来就需要根据规划的弹道约束基准设计变射面飞行程序。
传统弹道导弹主动段飞行程序设计一般采用经验公式[2],对公式参数进行优化选择,采用的优化算法有遗传算法[2]、粒子群优化算法[3]、基于均匀设计的优化算法及其组合使用[3]等,其缺点是经验公式限制飞行程序的变化趋势。目前主动段飞行程序设计还出现了不采用经验公式固定变化趋势的其它优化算法,如SQP算法[4]、高斯伪谱法[5]、hp-RPM伪谱法[6]等,也能取得很好的优化效果,但仅限于俯仰飞行程序的设计。飞行程序设计属于轨迹优化或弹道优化的范畴,在上述的优化方法中,高斯伪谱法、hp-RPM伪谱法等伪谱法以其求解精度高和收敛速度快的特点,近几年来在再入机动弹道优化设计[7]和助推-滑翔弹道优化设计[8]中得到了广泛的应用。为提高优化速度和精度,本文根据变射面飞行程序设计的特点,采用hp-RPM伪谱法进行优化设计。
1变射面飞行程序设计思想
三级发动机导弹的变射面飞行弹道参见图1,对于Ⅰ级助推段的飞行程序可采用传统射面内的飞行程序设计方法进行设计;而射面变换飞行段A→B或C→D是完成弹道接力的动力段,射面变换飞行程序设计是要确定从当前射面变换起控点A或C到下一射面弹道入轨点B或D的俯仰/偏航程序角随时间变化的规律,需满足起控点、终点速度和位置约束条件,是一个最优控制问题,因而实现变射面飞行的关键是射面变换飞行段A→B或C→D的俯仰/偏航飞行程序的设计。

图1 三级发动机导弹变射面飞行示意图
本文的研究目的是在射面变换规划提供各射面弹道约束基准的基础上,快速进行变射面飞行程序设计。由于射面变换规划基于椭圆弹道理论,因而变射面飞行程序设计采用如下思路:首先在地球假设为圆球的情况下,建立射面变换飞行程序优化设计模型,进行优化设计,然后建立地球扁率影响修正模型进行飞行程序修正,从而设计出变射面飞行弹道。
传统导弹的飞行程序优化设计,多采用飞行程序的经验变化公式,对公式中的参数进行优化,这样容易限制飞行程序的变化趋势,而无法实现最优。因而,本文对飞行程序的优化方法采用hp-RPM伪谱法,能够自动优选出变射面飞行程序的变化趋势,但由于伪谱法优化精度、优化时间跟配点数、迭代次数等紧密相关,为了加快优化速度,考虑到后续的扁率修正,对优化精度要求可适当降低,同时对配点数和迭代次数的选择尽量少。为便于后续的扁率影响的快速修正,需对hp-RPM伪谱法优化的离散俯仰/偏航飞行程序数据进行多项式拟合平滑,然后建立地球扁率影响修正模型,通过弹道牛顿迭代确定修正参数,完成射面变换俯仰/偏航飞行程序设计。本文主要针对射面变换飞行段A→B或C→D进行飞行程序设计,为方便描述优化设计方法,以射面变换飞行段A→B为例,进行飞行程序设计,C→D段飞行程序设计与A→B段类似。
2射面变换飞行程序优化模型
射面变换飞行程序设计是一个最优控制问题,一般通过优化方法来进行设计。由于射面变换规划是基于椭圆弹道理论的,规划出的基准参数是基于地球为圆球假设的椭圆弹道参数。因此,首先假设地球为圆球,导弹不受地球扁率影响,建立射面变换飞行程序优化模型。射面变换夹角和各射面弹道参数示意图见图2。
图2 射面变换夹角和各射面弹道参数示意图
图2中,ΔA为初始离面角;Λ2为第一射面与第二射面夹角,Λ3为第二射面与第三射面夹角;vk1为第一射面弹道Ⅰ级助推出大气层时的速度大小,Θk1为第一射面起始点K1处弹道倾角,rk1为起始点K1处地心距,ΛA为起始点K1处与正北方向夹角,βc1为第一射面弹道射程角;vk2为第二射面弹道关机点速度大小,Θk2为倾角,rk2为地心距,ΛB为椭圆弹道面起始点K2处与正北方向夹角,βc2为射程角;vk3为第三射面弹道关机点速度大小,Θk3为倾角,rk3为地心距,ΛC为椭圆弹道面起始点K3处与正北方向夹角,βc3为射程角。
2.1 状态方程
射面变换飞行段在大气层之外,因而只受发动机推力和地球引力,质心运动方程为
(1)
式中:g=fme/r2,r为地心距,f为引力常数,me为地球质量,vxa、vya,vza、xa、ya、za分别为导弹速度和位置在发射惯性坐标系下的投影;Fp为发动机推力;m为导弹质量;Q为秒耗量;φ,ψ为需要优化设计的俯仰/偏航程序角;R为地球平均半径。
2.2 过程约束
在射面变换飞行过程中,应该保证导弹不受气动力影响,飞行高度h在85km以上。因而有:
h=r-R≥85km
2.3 终端状态约束
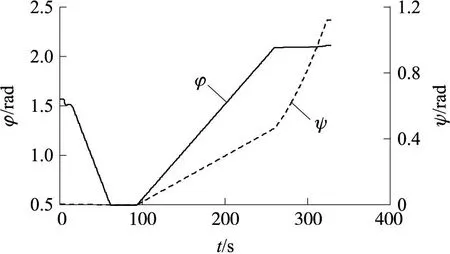
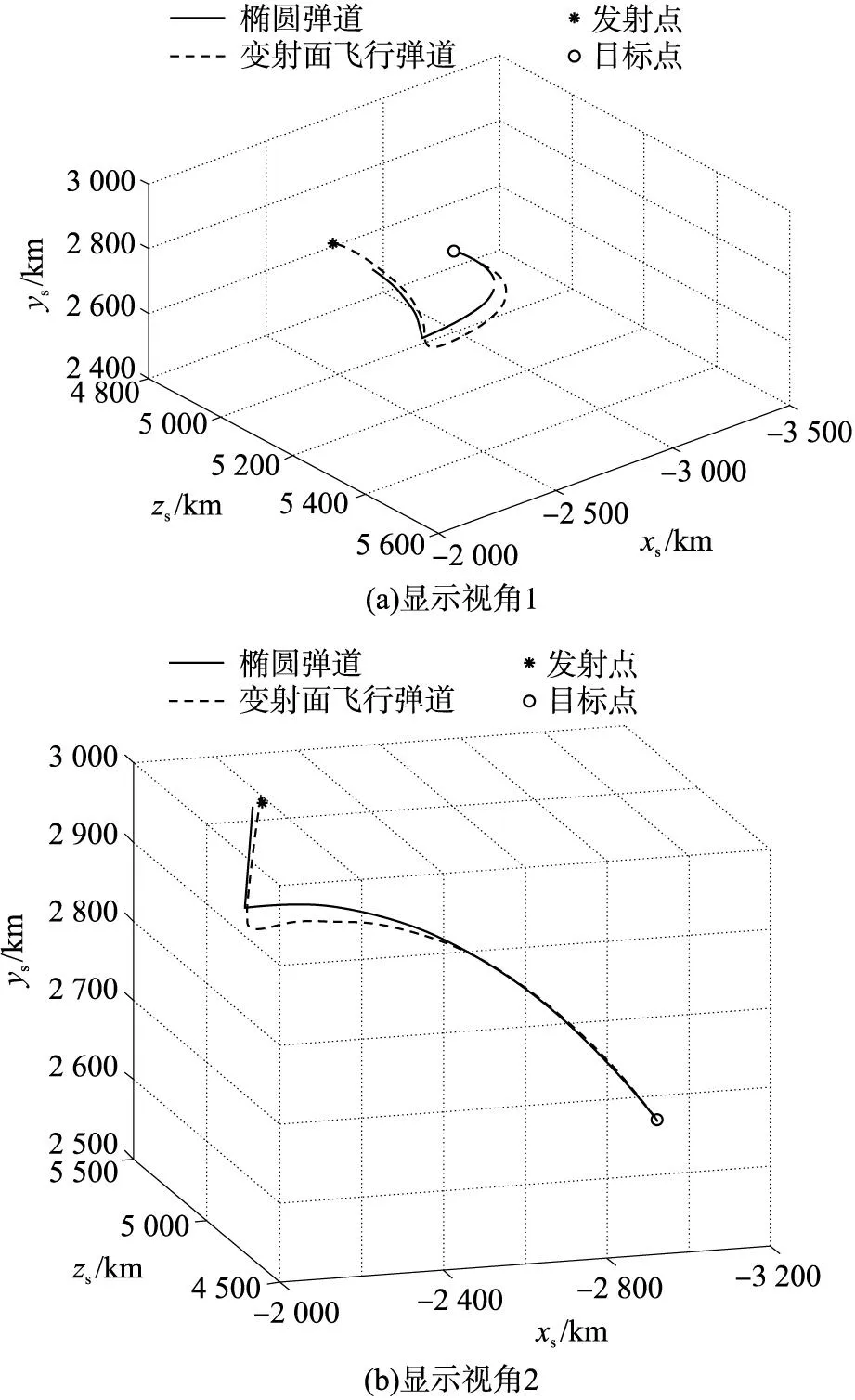
射面变换飞行段的结束点是下一射面椭圆弹道的入轨点,因而应满足终端约束,Xf=X(tf),X=(vxavyavzaxayaza),由导弹飞行时间tf确定入轨点B的状态约束。见图2,设第二射面椭圆弹道的起始时刻为tbsm2,由射面变换规划给出,tg2为导弹二级发动机工作时间,则入轨点时间相对第二射面椭圆弹道的起始时刻时间为tf2=tf-tbsm2 先计算椭圆弹道参数: p2=rk2Ek2cos2Θk2 式中:Ek2为第二射面弹道能量参数;e2为第二射面弹道偏心率;p2为第二射面弹道半通径;a2为第二射面弹道长半轴;ββ为第二射面弹道K2处真近点角,0≤ββ≤π/2。 采用迭代方法求tf2对应的射程角βf2,给定βf2初值,令βfd=10-5,迭代计算下列各式: β1=βf2-ββ cf2=rf2vf2cosΘf2 βf2=βf2+Δβf tf2时刻对应的速度和位置参数在地心惯性直角坐标系下的投影: 将其转换到发射惯性坐标系下: 式中:xf2sa、yf2sa、zf2sa为位置在地心惯性直角坐标系下的投影;vf2xsa、vf2ysa、vf2zsa为速度在地心惯性直角坐标系下的投影;xf2a、yf2a、zf2a为位置在发射惯性坐标系下的投影;vf2xa、vf2ya、vf2za为速度在发射惯性坐标系下的投影;ω为地球自转角速度;x0、y0、z0为发射点在惯性坐标系下的投影;r0为发射点的地心矩;φ0、λ0为发射点地心纬度和经度;G为发射惯性系到惯性直角坐标系的转换矩阵。 为保证射面变换的能量需求,射面变换飞行程序设计以能量最省为优化目标,A→B段目标函数为 假设秒耗量Q恒定,则: minJ=tf-tbsmA0 3射面变换飞行程序优化设计 对射面变换飞行程序设计,采用hp-RPM伪谱法进行优化,具体实现方法在此不作阐述,参见文献[6],其关键是优化初始条件的确定。 初始条件主要包括hp-RPM伪谱法配点数、hp-RPM伪谱法自适应调节相关参数、状态变化范围、控制参数变化范围、边界条件即终端约束精度、收敛精度、状态与控制参数猜测值。其中,hp-RPM伪谱法自适应调节相关参数采用常用值,为了同时保证优化精度和优化速度,hp-RPM伪谱法配点数选为100,优化收敛精度定为2×10-6;终端约束涉及到6个状态参数,同时满足相当困难,因此,速度的3个分量约束范围取为[-1.0×10-4,1.0×10-4],位置分量约束取其中2个为[-1.0×10-1,1.0×10-1]和[-1.0×103,1.0×103],飞行程序设计由此带来的误差由后面的修正模型消除;为了提高优化速度,状态与控制参数猜测值选择可行值,射面变换飞行段状态与控制参数变化范围根据猜测值来选择。猜测值采用弹道闭路迭代方法求取,根据迭代计算出的需要速度方向来求解俯仰/偏航程序角,再根据俯仰/偏航程序角解算弹道获取状态变量值。 针对A→B段,射面变换飞行段需要速度迭代计算以弹道终点C倾角Θc2为约束,迭代计算出需要速度大小vRi[9]。然后按下列各式计算需要速度增量: qi=sinΘkf,i Δvgxa,i=vRxa,i-vxai Δvgya,i=vRya,i-vyai Δvgza,i=vRza,i-vzai 按以下控制量φai,ψai进行导引控制: 式中:T为积分计算周期,φa、ψa分别为俯仰、偏航姿态。 通过地球为圆球假设的质心弹道数值积分解算,可得出射面变换飞行段各积分周期点的状态参数和俯仰/偏航姿态角。 设射面变换飞行段各积分周期点状态参数和控制参数猜测值最大与最小分别为vxa,max、vxa,min,vya,max、vya,min,vza,max、vza,min,xa,max、xa,min,ya,max、ya,min,za,max、za,min,φa,max、φa,min,ψa,max、ψa,min。 状态参数和控制参数变化范围如下。 速度为[vxa,min-1 000,vxa,max+1 500]、[vya,min-1 000,vya,max+1 000]、[vza,min-1 500,vza,max+1 500],单位为m/s。 位置为[xa,min-100 000,xa,max+100 000]、[ya,min-100 000,ya,max+100 000]、[za,min-200 000,za,max+200 000],单位为m。 导弹质量[mmin,mmax],mmax为起控点质量,mmin为该级发动机耗尽后质量,单位为kg;俯仰姿态角为[φa,min-0.5,φa,max+0.5],偏航姿态角[ψa,min-0.5,ψa,max+0.5],单位为rad。 hp-RPM伪谱法优选出的俯仰、偏航飞行程序姿态是离散数据,不一定平滑。因此采用多项式进行拟合平滑处理,选取多项式为 当离散数据存在阶跃变化时,可采用分段多项式拟合。 由于射面变换规划采用椭圆弹道理论,射面变换飞行程序的hp-RPM伪谱法优化设计基于地球为圆球假设,不考虑地球扁率影响。因而,需要建立地球椭球和扁率影响修正模型,对射面变换飞行程序进行修正。 若严格精确考虑速度约束,需采用时间变量的多项式修正模型进行修正。此处为了方便,仅精确考虑位置约束,采用常值修正公式: 式中:aφ,bψ为需要确定的修正参数。 修正时,只考虑各射面弹道终点位置对应高程的经纬度约束,通过弹道的牛顿迭代方法对修正参数进行确定,其速度快,且简便可行。迭代计算步骤如下: ①令迭代初值选为aφ=0,bψ=0,设小扰动量δaφ=0.001,δbψ=0.001; ⑤令修正量为Δaφ、Δbψ,则有: 式中: ⑥令aφ=aφ+Δaφ,bψ=bψ+Δbψ,转入②。 4仿真算例 仿真的目的在于验证变射面飞行程序设计方法的正确性,为了验证的方便,选择两级固体发动机导弹,最大射程6 000km左右,进行一次变射面规划,然后按本文方法进行射面变换飞行段的飞行程序设计。 选择发射点为经度113°,纬度28°;目标点为经度123°,纬度25°。射程约1 000km,传统导弹射向为114°(与正北方向夹角);变射面飞行时,假设Ⅰ级转级飞行段未出大气层前导弹攻角为0,能稳定飞出大气层,给出某一作战需求的射面变换规划结果如表1所示。表中tc1为第一射面弹道飞行时间,ψ1为第一射面弹道终点处与正北方向夹角;tc2为第二射面弹道飞行时间,ψ2为第二射面弹道终点处与正北方向夹角,具体计算方法参见文献[1]。 表1 射面变换规划结果 选取第一射面起控点参数:转级飞行时间125s,惯性系位置x轴向分量221 499.5m,惯性系位置y轴向分量127 298.5m,惯性系位置z轴向分量0,惯性系速度x轴向分量1 216.096m/s,惯性系速度y轴向分量-208.752m/s,惯性系速度z轴向分量0,地心距为6 502 076.5m。 第二射面椭圆弹道参数:长半轴3 576 260.0m,半通径1 073 696.6m,扁心率0.836 523;第二射面椭圆弹道起点参数见表1;用于计算终端状态约束。 采用GPOPS5.0版对射面变换飞行段的俯仰/偏航程序角分别进行优化设计,在GPOPS软件中加入上述飞行程序优化设计模型代码,给定优化初始条件,运行软件即可完成飞行程序的优化设计,然后对地球扁率影响进行修正。 通过GPOPS软件优化设计和多项式最小二乘拟合后,射面变换飞行俯仰/偏航程序角设计结果如图3所示。 考虑地球椭球和扁率影响,对全弹道进行优化计算,采用牛顿迭代法进行飞行程序常值修正参数优化。经优化计算,修正参数aφ、bψ的值分别为0.491 204,-0.298 214,导弹惯性落点偏差在1m内。 变射面飞行仿真俯仰/偏航角随时间变化如图4所示,变射面飞行弹道仿真如图5所示。从变射面飞行俯仰/偏航角变化和变射面飞行弹道数据可以看出,变射面飞行程序设计方法是正确可行的。 统计仿真计算时间,射面变换飞行俯仰/偏航角的hp-RPM伪谱法优化计算时间在3min内,多项式拟合计算时间在1s内,地球椭球和扁率影响弹道迭代修正计算时间在1min内,时间总和在5min内。其它优化方法在同等优化条件下的优化时间至少在10min以上,可见本文方法在计算速度上优势明显。 图3 射面变换飞行段俯仰/偏航程序角随时间的变化曲线 图4 变射面飞行全弹道俯仰/偏航角随时间的变化曲线 图5 变射面飞行弹道在地心直角坐标系下的曲线图 5结束语 文中提出了一种地地导弹变射面飞行程序设计方法,能够快速优化设计出射面变换飞行段的俯仰/偏航飞行程序,为导弹变射面飞行提供了控制基准,并能够有效节省发动机能量用于实际飞行弹道偏差的修正。后续,在完成变射面飞行程序设计研究后,将开展变射面飞行的制导控制技术研究,为变射面飞行的实现提供技术支撑。 参考文献 [1] 王继平,王安民,魏诗卉,等.弹道导弹弹道面转移变换规划方法.弹道学报,2014,26(2):22-28. WANG Ji-ping,WANG An-min,WEI Shi-hui,et al.Planning- method of the ballistic trajectory plane transfer of ballistic missile.Journal of Ballistics,2014,26(2):22-28.(in Chinese) [2] 鲜勇,田海鹏,冯杰,等.基于改进遗传算法的最优精度飞行程序角设计方法.四川兵工学报,2013,34(1):1-4. XIAN Yong,TIAN Hai-peng,FENG Jie,et al.Study of designing trajectory missile’s flight process of the optimal precision based on the improved genetic algorithm.Journal of Sichuan Ordnance,2013,34(1):1-4.(in Chinese) [3] 王永圣.固体弹道导弹推进/气动/弹道优化设计研究.哈尔滨:哈尔滨工业大学,2013. WANG Yong-sheng.Study on the propulsion aerodynamics trajectory integrated optimal design for solid ballistic missile.Harbin:Harbin Institute of Technology,2013.(in Chinese) [4] 洪蓓,梁欣欣,辛万青.固体运载火箭多约束弹道优化.导弹与航天运载技术,2012(3):1-5. HONG Bei,LIANG Xin-xin,XIN Wan-qing.Multi-constraint trajectory optimization for solid launch vehicle.Missiles and Space Vehicles,2012(3):1-5.(in Chinese) [5] 张洪倩.基于高斯伪谱法的弹道优化设计与实现.南京:南京理工大学,2014. ZHANG Hong-qian.Trajectory optimization designing and realization based on Gauss pseudospectral method.Nanjing:Nanjing University of Science and Technology,2014.(in Chinese) [6] 洪蓓,辛万青.基于hp自适应伪谱法的固体运载火箭轨迹优化.航天控制,2012,30(4):18-22. HONG Bei,XIN Wan-qing.Trajectory optimization of solid launch vehicle based on Hp-Adaptive pseudospectral method.Aerospace Control,2012,30(4):18-22.(in Chinese) [7] 张鹏程,李新国.基于Gauss伪谱方法的高超声速滑翔飞行器滑翔段轨迹优化.电子设计工程,2013,21(15):105-107. ZHANG Peng-cheng,LI Xin-guo.Trajectory optimization of glide phase for hypersonic glide vehicle based on GPM.Electronic Design Engineering,2013,21(15):105-107.(in Chinese) [8] 国海峰,黄长强,丁达理,等.多约束条件下高超声速导弹再入轨迹优化.弹道学报,2013,25(1):10-15. GUO Hai-feng,HUANG Chang-qiang,DING Da-li,et al.Re-entry trajectory optimization for supersonic missile considering multiple constraints.Journal of Ballistics,2013,25(1):10-15.(in Chinese) [9] 王小虎,陈翰馥,刘锋.机动再入飞行器主动段再入点约束闭路制导研究.宇航学报,2002,23(4):37-40. WANG Xiao-hu,CHEN Han-fu,LIU Feng.Study of the closed-loop guidance law for boost phase with reentry constraints of maneuvering reentry vehicles.Journal of Astronautics,2002,23(4):37-40.(in Chinese)

2.4 目标函数

3.1 hp- RPM伪谱法优化

3.2 离散飞行程序数据多项式拟合

3.3 地球扁率影响修正
4.1 仿真条件

4.2 仿真结果及结论

猜你喜欢
军民两用技术与产品(2021年9期)2021-11-27
北京航空航天大学学报(2017年5期)2017-11-23
环球时报(2017-09-07)2017-09-07
军事文摘(2016年6期)2016-06-03
