
ADOP可观测性分析方法在旋转式惯导初始对准中的应用
2016-03-16 07:43胡华峰
导航定位与授时 2016年5期
胡华峰, 刘 明, 李 旦, 罗 伟
(湖北航天技术研究院总体设计所,武汉 430040)
ADOP可观测性分析方法在旋转式惯导初始对准中的应用
胡华峰, 刘 明, 李 旦, 罗 伟
(湖北航天技术研究院总体设计所,武汉 430040)
针对旋转式惯导系统多位置初始对准可观测性的问题,对可应用于初始对准方案选择的姿态精度因子(ADOP)可观测性分析方法进行了研究。以惯导初始对准33维状态误差方程为研究对象,分析ADOP方法在旋转式惯导初始对准的转动顺序、停留时间及模型降阶方面的应用。理论分析和仿真结果均表明该方法控制灵活、直观有效,能够为旋转式惯导初始对准应用中最佳方案选择提供依据。
ADOP;可观测性;旋转式惯导系统;初始对准
0 引言
惯性导航系统(Inertial Navigation System,INS)中一个十分重要的问题就是其初始对准问题。实践证明应用卡尔曼滤波器实现INS的初始对准具有较好的效果。卡尔曼滤波器对系统状态估计的收敛速度和精度决定着系统初始对准的速度和精度,而这在很大程度上是由系统的可观测性所决定的。因此,在设计卡尔曼滤波器之前想要研究系统状态的可估计性和初始对准的速度和精度,必须首先分析系统状态的可观测性[1-2]。
为了实现惯导系统快速精确对准,有效改善系统的可观测性,J.G.Lee和C.G.Park等研究发现,等效地转动惯性测量单元(IMU)能够巧妙地变换导航系统误差模型中的系统矩阵,从而改善导航系统的可观测性,实现快速精确对准[3]。因此,对于具有旋转功能的惯导系统,弄清转动对系统可观测性和可观测度的影响,发现最优的对准方案,对提高捷联惯性系统初始对准的速度和精度具有重要的意义。
目前,常用的可观测性和可观测度分析方法很多,但都是优缺点并存[4-6]。实际应用中,应根据需要选择合适的分析方法,Carl Johnson提出一种姿态精度因子(Attitude Dilution of Precision,ADOP)方法来分析状态变量的可观测度,这种方法生成的ADOP图形象直观,而且可以用来设计特定的轨迹以增强状态的可观测度[7-8]。本文在充分分析ADOP可观测性分析方法的基础上,介绍了如何利用ADOP方法确定初始对准中的旋转方案及系统模型的降阶。
1 ADOP可观测性分析法
1.1 ADOP可观测性分析
xn=Φn,n-1xn-1+wn-1
(1)
其中,wn是白噪声序列,其协方差阵为Qn。
这里n时刻的状态量还可以表达如下
xn=Φn,0x0+an-1
(2)
其中
an-1=wn-1+Φn,n-1wn-2+Φn,n-2wn-3+…+
Φn,2w1+Φn,1w0
量测序列为
zn=Hnxn+vn
(3)
其中,vn是量测噪声,Hn为n时刻的量测矩阵。
将式(2)带入式(3),则量测序列写为如下形式
zn=Hn(Φn,0x0+an-1)+vn
=HnΦn,0x0+un
(4)
其中:
un=Hnan-1+vn
(5)
注意,a与v是不相关的。
定义:
(6)
有
Z=Hx0+U
(7)
定义协方差阵如下:
(8)
由于a与v不相关,所以由式(5)和式(8)得
(9)
又有an=wn+Φn+1,nan-1,且an-1与wn不相关,所以
(10)
又有

(11)
R =cov(U)
=diag(R1,R2,…,RN)
(12)
实际应用中,考虑与量测量相关的状态所对应的系统噪声项较小(如加速度计随机游走),式(11)计算值的量级小于Rn,因此可以忽略R矩阵非对角块的值,即式(12)成立。
因此,上述问题转换为一个典型的最小二乘问题,根据给定的量测值Z和噪声项U估计系统状态x0。
加权最小二乘估计的指标是[7]
=min
(13)
其解为
(14)
(15)
将式(6)和式(12)代入式(14),可以获得如下关系式
P=(HTR-1H)-1
(16)
其中,n表示第n次量测。
如果要研究最优估计时每个状态变量的可观测性,取P的每个对角线元素作为对应状态可观测性的度量,由于P的对角线元素描述了对应状态的误差方差,所以P的对角线元素值收敛的越小,代表对应状态变量的可观测性越高。

(17)
因此,可以加入一个量测方程
(18)
将式(18)与式(7)组合成为一个新的最小二乘问题,即:
(19)
因此,由马尔可夫估计的均方误差可知状态变量的协方差矩阵可以表示为
(20)
1.2 P阵规范化
如果直接计算P阵,给出各个状态的收敛大小,不进行规范化处理,那么各状态的取值范围可以是任意的,使得各个状态之间不具有可比性,不能有效判断各个状态的收敛程度,因此,有必要对P阵进行规范化处理[9]。
通常,在进行卡尔曼滤波之前都要设定P0,在此认为P0是确切已知且为对角阵。利用P0将P全等变换为P′,变换等式如式(21)所示
(21)

2 基于ADOP的转动方案选择
下面将介绍如何利用ADOP方法来确定地面初始对准的方案。
2.1 系统说明
理论研究表明,当IMU绕方位轴从初始位置旋转180°到第2位置时,等效东向和北向陀螺漂移的符号由正变负,若在2个位置停留时间相同则可以抵消2个陀螺仪的常值漂移误差,从而提高方位失准角的精度。因此优先考虑绕方位轴(本文约定为Z轴)转动的方案。
另外,在绕方位轴旋转的基础上,绕另外任意一轴旋转90°,可以有效提高方位陀螺漂移的估计精度,因此,为了对比,将这种组合方案作为待选转动方案。另外,选择静止不动作为参考方案进行对比。
因此,总结上述方案如表1所示(初始时刻XYZ的指向为北东地)。

表1 转动方案
惯导系统误差模型设定为33维,包含6个系统状态(速度、姿态各三维),15个加速度计状态及12个陀螺状态,详细方程可参考P.G.Savage的书[10]。加速度计零偏30μg,标度因数误差1×10-4,失准角误差100μrad,二次项系数误差3×10-6/g;陀螺零偏差0.01(°)/h,标度因数误差3×10-5,失准角误差100μrad。
2.2 最优转动顺序
目前,加速度计的水平已经达到很高的精度,惯导系统的水平对准精度已经能够满足用户需要,因此本文以考察初始对准的方位对准精度为目标,设对准时间为5min,转动速度为9(°)/s,则仿真计算得各转动方案的方位对准精度结果如表2所示。

表2 各转动方案的方位对准精度
从表2数据可以看出,绕Z转动的方式为最优方式,5min的方位对准精度为0.462′;绕Z轴和X轴的组合方式效果最差,绕Z轴和Y轴的组合方式效果居中,主要是在绕Y轴的转动过程中,该轴保持不动,保证了绕Z轴转动的方位对准精度。需要强调的是此处仅以方位误差的大小衡量效果的好坏。
由于篇幅所限,此处仅列出方案2姿态误差的曲线图,如图1所示。

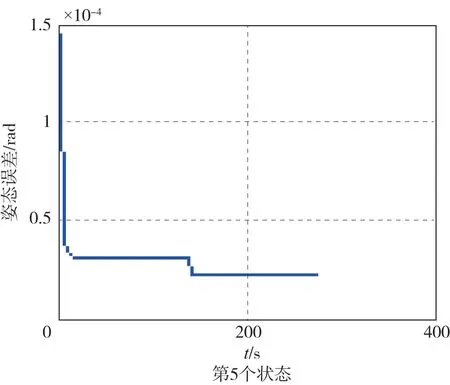

图1 方案2姿态误差曲线图Fig.1 Attitude error of scheme 2
图1中第4、5、6状态分别为东向、北向和天向姿态误差。从图1中可以看,在没有转动时水平姿态误差也能较快地收敛到一定程度,而方位收敛较慢,且一定时间后保持在一定水平上;在转动之后,水平姿态和方位均能有效收敛到更高,增强了各个系统的可观测度。
2.3 最优时间分配
从2.2节的分析可知,绕Z轴转动的方案为较优转动方案。但是上述分析的过程中,是将整个对准时间平均分配在各个停止段,理论证明基于转动方式的初始对准方案,只需要在对称位置上停留相同时间即可,因此,有必要验证转动过程中最后一个位置停留时间长短对方位对准精度的影响。具体时间分配及计算结果如表3所示。

表3 不同转动时间分配的方位对准精度
从表3可以看出,对于转动方案2,时间分配为[140 140]时最优。
3 基于ADOP的模型降阶
利用ADOP可观测性分析方法进行模型降阶,就是寻求可观测度高的状态分量,将这些状态保留,删除其他状态量,获得低阶的对准模型从而降低运算量。
由上述分析可知,基于ADOP的可观测性分析方法可以直观地描述各状态分量本身的收敛情况,然而为有效地比较各状态分量之间的收敛程度大小,需要进行归一化。对时间分配为[140 140]的转动方案进行归一化处理后的结果如图2所示。
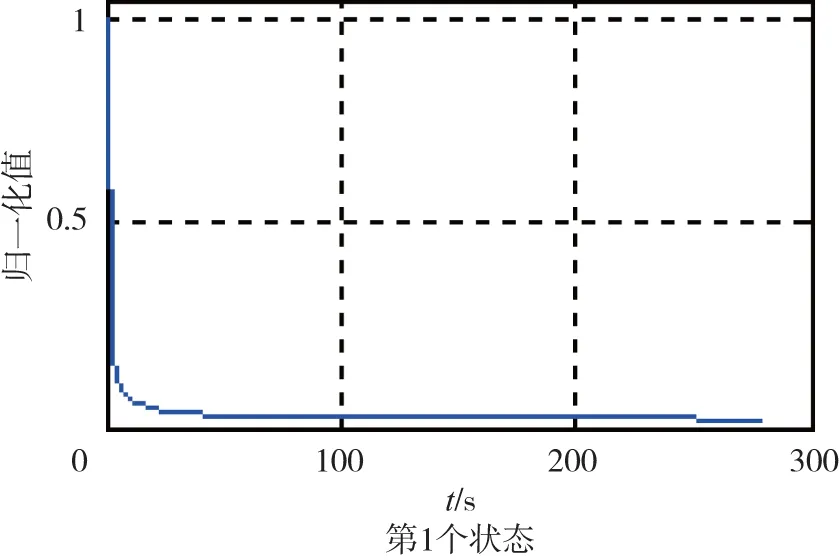
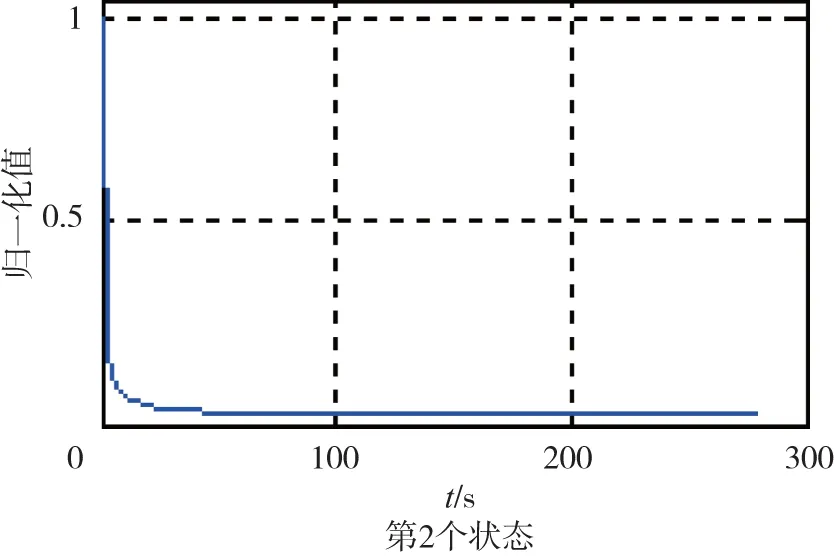
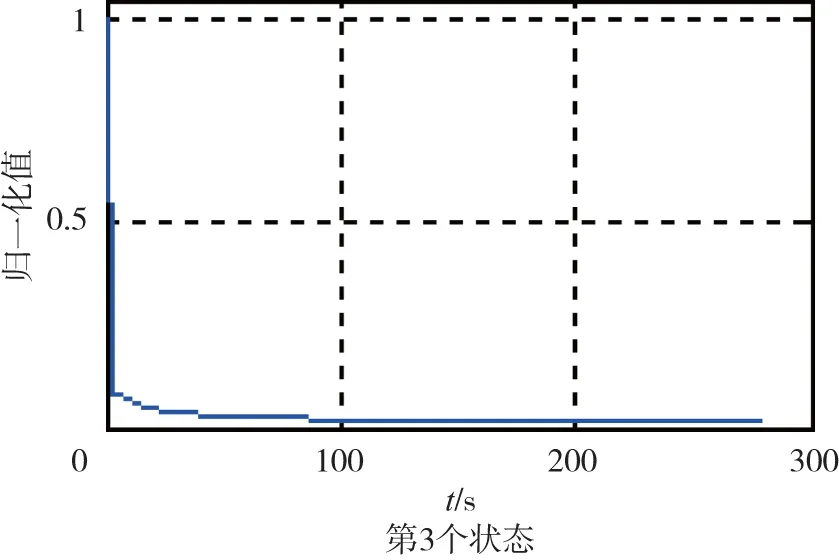
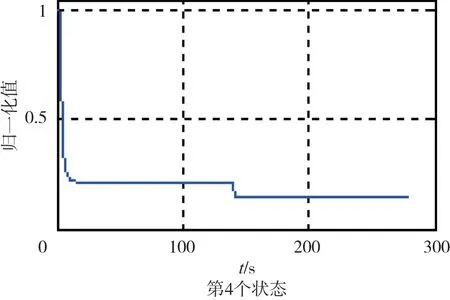





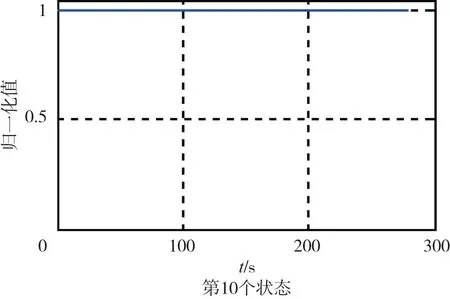
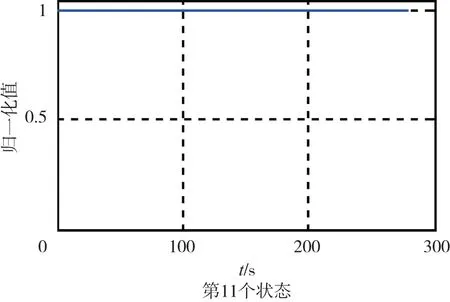
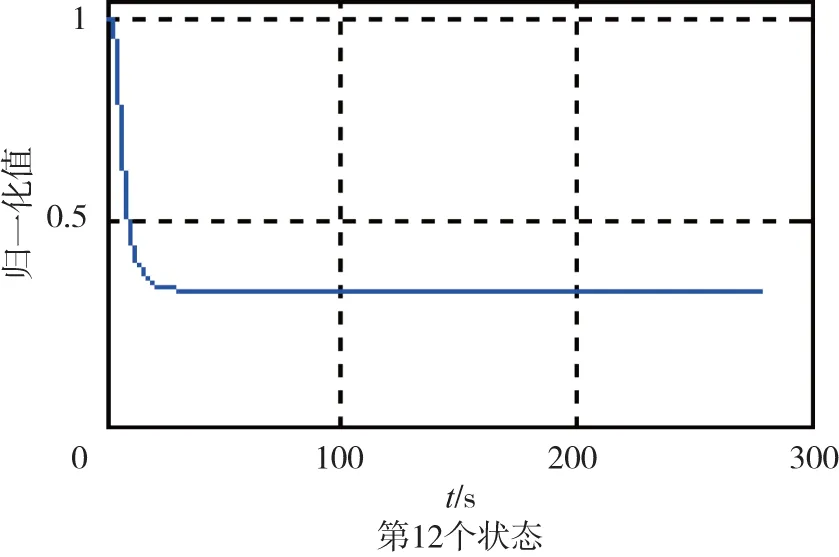


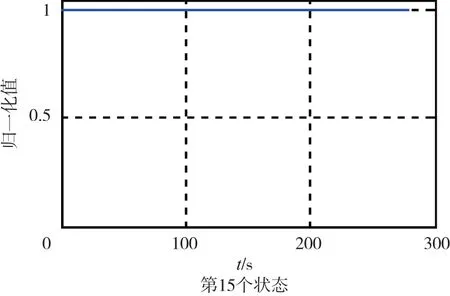



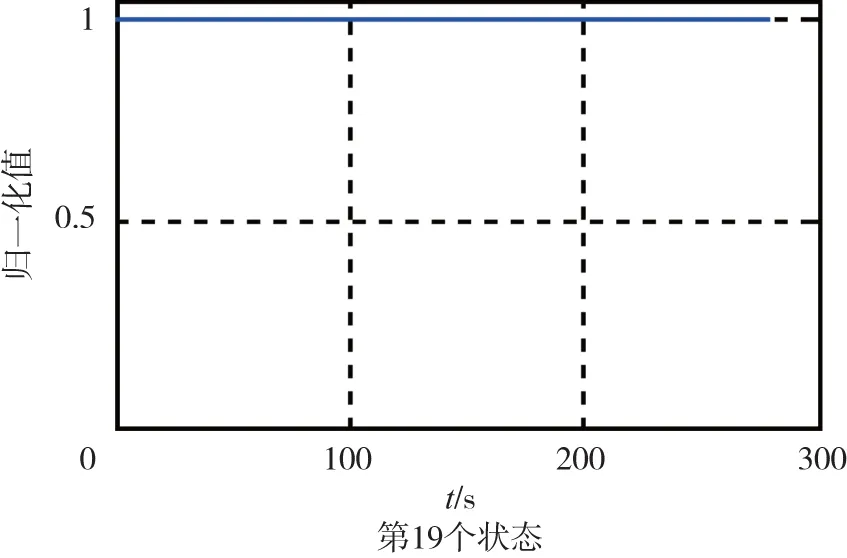
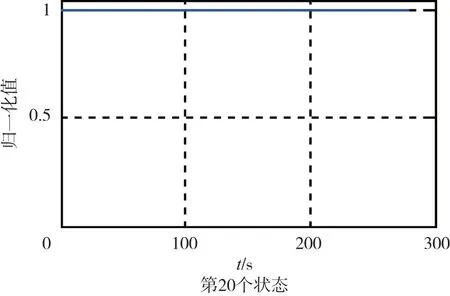



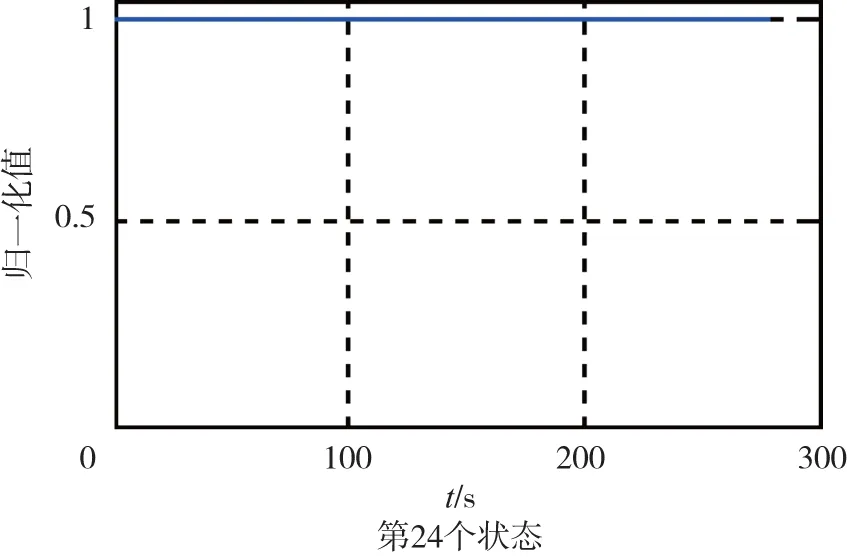

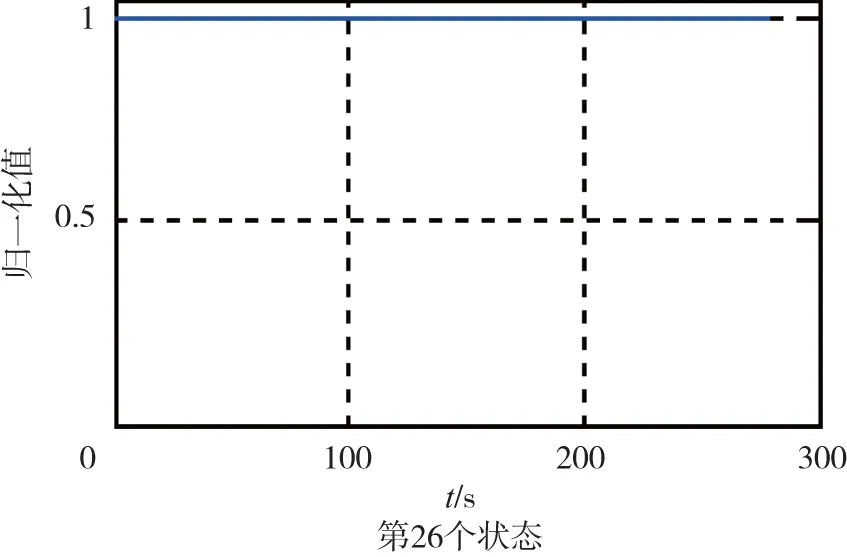



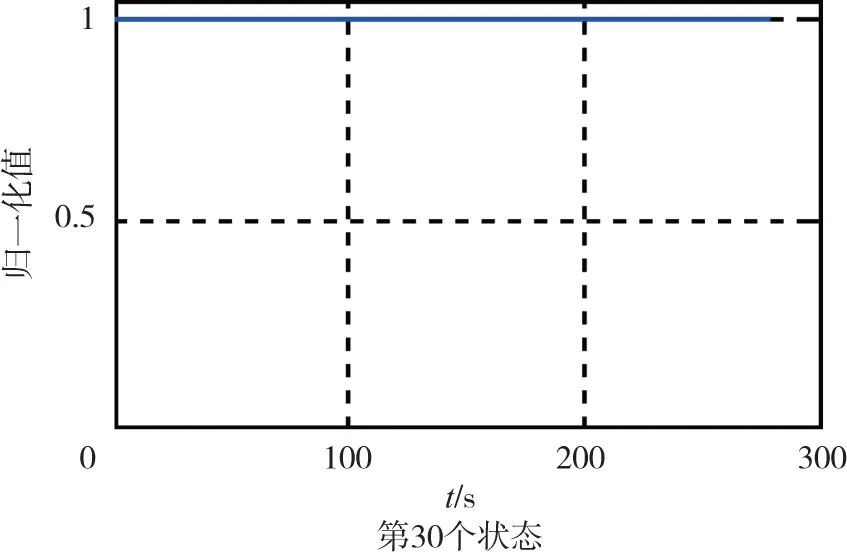

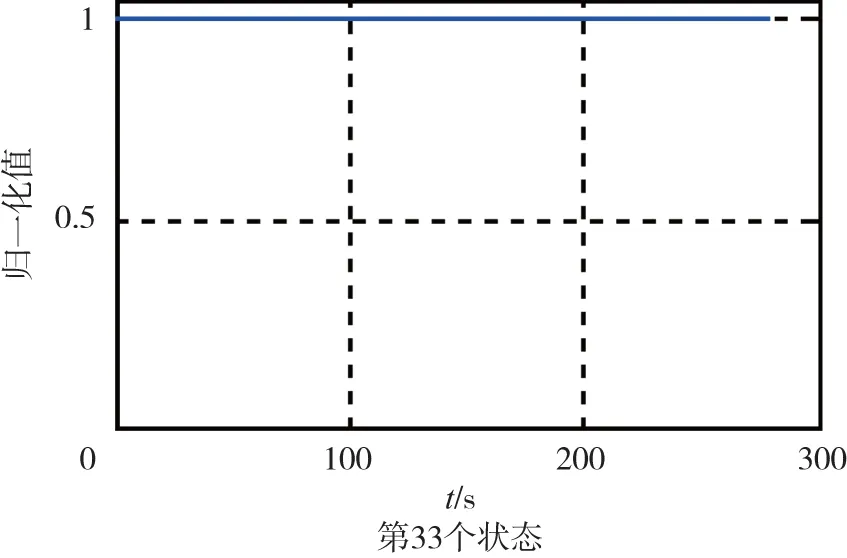
图2 ADOP归一化后的结果Fig.2 The result of ADOP with normalization
从图2中可以看出,可观测性较高的状态有6维系统状态(1~6),Z加速度计标度因数误差(12)、X陀螺零偏误差(22)、Y陀螺零偏误差(23),另外,3个加速度计零偏误差(7~9),X加速度计相对Z轴失准角误差(14)、Y加速度计相对Z轴失准角误差(16)、X陀螺相对Z轴失准角误差(29)、Y陀螺相对Z轴失准角误差(31)也具有一定的可观测性,上述状态共16维状态。
4 结论
本文针对地面惯性导航系统初始对准的实际需求,在详细分析基于姿态精度因子可观测性和可观测度的基础上,以最终方位对准精度为目标,提出了利用ADOP辅助确定IMU转动方案(特别是在确定各转动位置时间分配上)的分析方法,同时给出了利用ADOP可观测性分析方法进行模型降阶的具体实现。本文所述方法为工程实际应用提供了依据,奠定了基础。
[1] 王荣颖,许江宁,卞鸿巍. 基于可观测性分析的方位旋转式惯导初始对准仿真研究[J]. 中国惯性技术学报, 2009, 17(1) : 16-19.
[2] 杨晓霞,阴玉梅. 可观测度的探讨及其在捷联惯导系统可观测性分析中的应用[J]. 中国惯性技术学报, 2012, 20(4) : 405-409.
[3] 王新龙. 捷联式惯导系统动、静基座初始对准[M]. 西安:西北工业大学出版社, 2013.
[4] 付梦印,郑辛,邓志红. 传递对准理论与应用[M]. 北京:科学出版社, 2012.
[5] Song L, Zhang C, Lu J. Self alignment of full skewed RSINS observability analysis and full observable Kalman filter[J]. Journal of Systems Engineering and Electronics, 2014, 25(1):104-114.
[6] 赵琳,李亮,孙明. 基于SVD的SINS多位置对准可观测性分析[J]. 中国惯性技术学报, 2008, 16(5) : 523-528.
[7] Johnson C,Ohlmeyer E J,Pepitone T R. Attitude dilution of precision-a new metric for observability of inflight alignment errors[C].AIAA Guidance, Navigation, and Control Conference and Exhibit, 2000.
[8] Ohlmeyer E J,Hanger D B,Pepitone T R. In-flight alignment techniques for navy theater wide missiles[C]. AIAA Guidance, Navigation, and Control Conference and Exhibit, 2001.
[9] Ham F M,Brown R G. Observability, eigenvalues, and Kalman filtering[J]. IEEE Transactions on Aerospace and Electronic Systems, 1983,19(2):269-273.
[10] Savage P G. Strapdown analytics[M]. Strapdown Associates, 2000.
The Application of ADOP Observability Analysis Method in Rotating-INS Initial Alignment
HU Hua-feng, LIU Ming, LI Dan, LUO Wei
(Designing Institute of Hubei Aerospace Technology Academy, Wuhan 430040, China)
To study the observability of rotating inertial navigation system(INS)’s multi-position initial alignment, the ADOP (Attitude Dilution of Precision) observability analysis methods are discussed in this paper. In order to research the application of ADOP for the best rotation sequence, the best state duration and reduce model order in rotating-INS’s multi-position initial alignment, the 33-state error model of the INS is taken as its study object. The simulation of initial alignment observability is carried out, the results of theoretical analysis and simulation both show that the method proposed in this paper is intuitive, effective and easy to control, and able to provide the basis for optimal scheme selection.
ADOP; Observability; Rotating inertial navigation system; Initial alignment
10.19306/j.cnki.2095-8110.2016.05.007
2015-06-15;
2015-07-06。
胡华峰(1986-),男,工程师,主要从事惯性技术研究。E-mail:h-hfeng@163.com
V249.32+2
A
2095-8110(2016)05-0033-08
猜你喜欢
电子工业专用设备(2022年1期)2022-07-13
舰船科学技术(2022年10期)2022-06-17
空间电子技术(2021年4期)2021-11-10
数字海洋与水下攻防(2020年5期)2021-01-04
导航与控制(2020年3期)2020-09-09
导航与控制(2019年4期)2019-09-25
宇航学报(2019年8期)2019-09-06
专用汽车(2018年10期)2018-11-02
当代陕西(2018年12期)2018-08-04
北京航空航天大学学报(2018年1期)2018-04-20
