
一种单陀螺单加速度计旋转调制寻北方法
2016-03-16 07:43李海军徐海刚裴玉锋郭元江
导航定位与授时 2016年5期
李海军,徐海刚,裴玉锋,郭元江,孙 伟
(北京自动化控制设备研究所,北京 100074)
一种单陀螺单加速度计旋转调制寻北方法
李海军,徐海刚,裴玉锋,郭元江,孙 伟
(北京自动化控制设备研究所,北京 100074)

加速度计;光纤陀螺;旋转调制;寻北;卡尔曼滤波
0 引言
寻北仪在陆军战车、火炮等军事领域得到广泛的应用。寻北仪的基本原理是在静态条件下,采用陀螺仪测量北向地球自转角速率,来获得陀螺敏感轴相对北向的偏角,即航向角。寻北原理决定了其精度容易受到陀螺零位、不水平角等因素的影响[1-3],需要采取一定措施来消除各种因素对寻北精度的影响[4-5]。
通常采用的方法是利用2个陀螺仪,配合旋转机构在0~360°范围内等间距位置,采集陀螺测量输出的角速度值,来获得陀螺敏感轴相对北向的偏角,即航向角。常用的寻北方案包括两位置方案、三位置方案以及四位置方案等[6-8]。近年来开始出现利用连续旋转调制的方法,来消除陀螺零位等因素的影响,大多是采用单轴陀螺,利用旋转机构的连续旋转来完成寻北计算。这种方法需要同时在转台平面安装2个正交的加速度计,以完成对不水平角的补偿[9-12]。
本文提出只需利用单轴光学陀螺和1个加速度计,利用连续旋转方法即可达到精确寻北的目的。
通过设定中间变量,建立起陀螺仪输出的角速度及加速度计输出的加速度与初始纬度及航向角之间的关系。利用旋转过程中,俯仰角和滚动角存在相关转换的特点,用单个加速度计的输出结果补偿初始滚动角及俯仰角的影响;并通过建立以中间变量、陀螺漂移,以及加速度计零偏为状态量的卡尔曼滤波误差模型,经滤波估计获得中间变量值;通过数值计算获得初始纬度及航向角,从而实现单轴陀螺仪及单轴加速度计连续旋转寻北计算。
本方法不需要输入初始纬度信息和精确调平,即可完成寻北。相对于其他寻北方法,具有简单、实用、可靠性高、成本低等特点。
1 坐标系及变量定义
为了对寻北方法进行详细说明,这里先定义相关的坐标系,具体如下:
b系:设垂直于转台平面向上为Y向,陀螺敏感轴在转台平面投影为X轴,Z轴在转台平面内与X、Y轴构成右手法则;
m系:b系绕Y轴旋转时的坐标系;
g系:陀螺仪所在的坐标系;
a系:加速度计所在的坐标系;
n系:当地地理坐标系。
各坐标的关系如图 1所示。
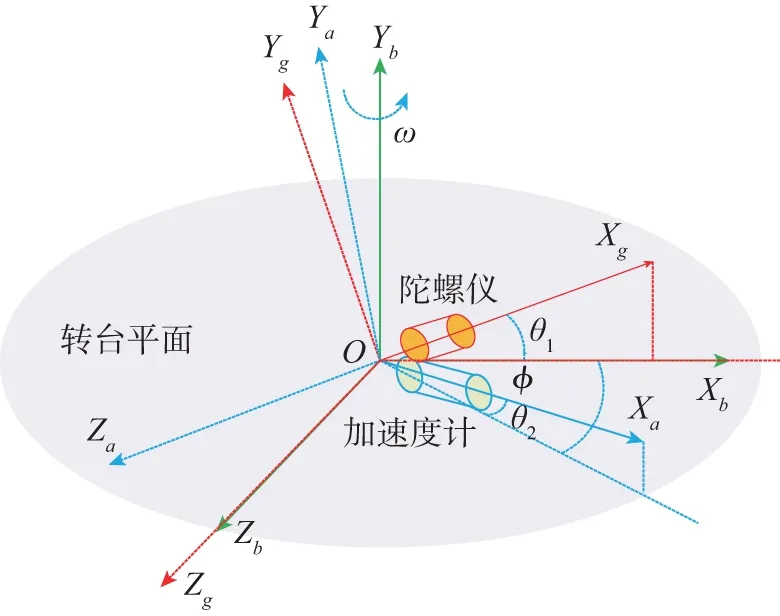
图1 坐标关系示意图Fig.1 The scheme of coordinate system
为了后面公式推导方便,这里对各轴系之间的角度及相关变量定义如下:
1)设b系相对地理坐标系n系的3个姿态角分别为:滚动角γ,航向角ψ,俯仰角θ,即转台的初始姿态角;
2)设Xg相对Xb的安装误差角为θ1,通过标定获得;
3)设Xa相对Xb的安装误差角为θ2、φ,通过标定获得;
4)设转台转动的角速率为ω;
5)从计算开始已转过的角度为α;
6)设纬度为L,地球自转角速率为ωie,其北向分量和天向分量分别为ΩN=ωiecosL、ΩU=ωiesinL;
2 公式推导
有了上面的变量定义就可以进行如下公式推导。
地理系n系的角速率和加速度分别为:
(1)
由此可以获得b系的角速率和加速度分别为:
(2)
因此,得m系的角速率和加速度分别为:
(3)
g系的角速率为
(4)
a系的加速度为
(5)
由姿态矩阵及转换矩阵计算方法,并经过小角度近似可得:
g系中x陀螺的输出为
ωg(1)= cos(α) [ cos(θ)cos(ψ)ΩN+sin(θ)ΩU] +
sin(α) {cos(θ)sin(γ)ΩU-
[ sin(θ)sin(γ)cos(ψ) +
cos (γ) sin(ψ) ]ΩΝ}+
θ1{ [ sin(γ)sin(ψ)-
sin(θ)cos(γ)cos(ψ) ]ΩN+
cos(θ)cos(γ)ΩU+ω} +ε
(6)
a系中x加表的输出为
fa(1)= cosα{[φcosθsinγ+ sinθ]g}+
sinα{ [ cosθsinγ-φsinθ]g}+
(7)
分别令:
(8)
则:
(9)
由前面式(8)中C、D的方程可解得:
(10)
故:
(11)
由此可将初始俯仰角及滚动角作为已知量,对A、B中未知的纬度及方位角进行求解。
再令:

(12)
则A、B方程可重写为:
(13)
如果可以装定初始纬度,则可通过A式直接计算出纬度
(14)
如果不能装定纬度,则通过下面方法计算出航向角及纬度。
由A、B两式经过变化可得
(15)
其中:
(16)
则解二次方程,取合理的一个结果可得
(17)
可得:
(18)
(19)
(20)
3 滤波器模型
上面给出了详细的公式推导,直接计算可以获得寻北结果,但是由于各种噪声的存在,如果直接计算,可能会出现较大偏差,为此特别设计卡尔曼滤波器,通过滤波器的滤波效果对噪声进行平滑,以获得更为准确的结果。
经过推导可得如下公式:
(21)
其中,α=ωt,t为滤波进行的时间。则可得量测矩阵为
(22)
为了消除角速率及加速度噪声大的影响,对式(21)在滤波周期内进行积分,可得
=hk1X1+hk2X2+…+hknXn
=hk1X1+hk2Φk2X2+…+hk2Φk2X2
=[hk1+hk2Φk2+…+hknΦkn]X1
=[hk1+hk2Φk2+…+hknΦkn]Xn/Φkn
(23)
所以可得
(24)
观测量为
(25)
通过卡尔曼滤波可得A、B、C、D的数值,再由第2节的相关公式,计算获得最终的寻北结果及纬度估计结果等参数。
4 误差分析
旋转调制寻北方法的主要误差源有陀螺漂移、加速度计零偏以及安装误差等。由于旋转可以将陀螺漂移及加速度计零偏的常值分量调制掉,因此对于寻北精度的影响,主要是陀螺漂移及加速度计零偏经过调制后的剩余误差。该误差与陀螺仪及加速度计的稳定性有关,稳定性越好,寻北精度就越高[1]。
安装误差主要包括,陀螺敏感轴与转台旋转轴之间的不正交角,以及加速度计在旋转台面上的安装杆臂等。前者造成旋转角速度分解到陀螺敏感轴,成为等效常值陀螺漂移。后者造成加速度计感受向心加速度,成为等效常值加速度计零偏。由前面的分析可知,这两种常值误差不影响寻北精度。
详细的误差分析过程可参见文献[1]。
5 试验验证
图2给出了某条次试验时,方位角的估计误差曲线,可以看出试验时方位角收敛较快,在3min之后基本收敛至0.5mil以内。图 3给出了纬度估计曲线,图 4和图 5分别给出了估计的初始时刻姿态角曲线,可以看出初始姿态角的估计曲线较为平稳。

表1 寻北验证试验估计结果及重复性误差

图2 某条次试验寻北误差Fig.2 The north-seeking errors in experiment
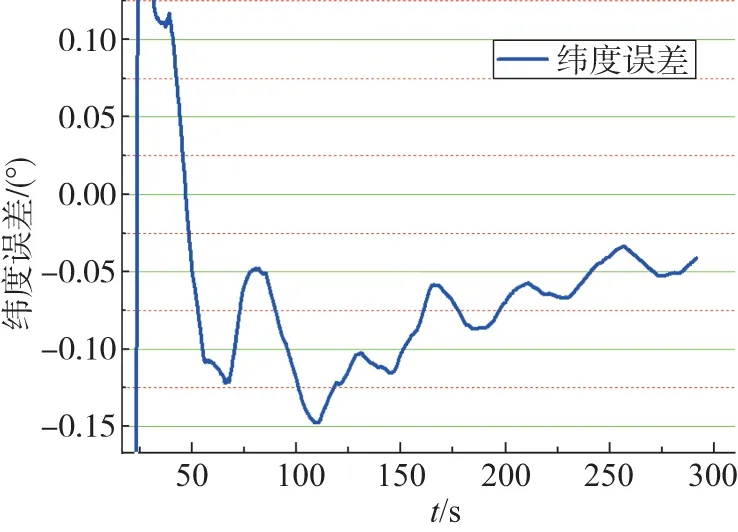
图3 某条次试验纬度估计误差Fig.3 The latitude estimation errors in experiment
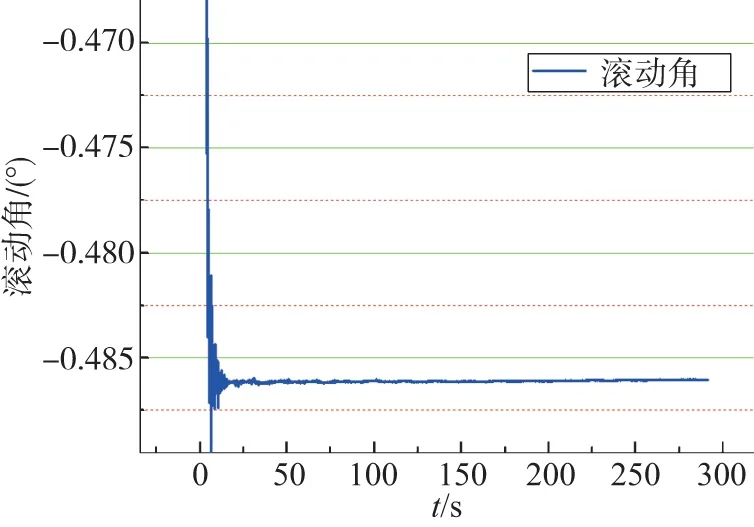
图4 某条次试验滚动角估计值Fig.4 The roll attitude estimation in experiment
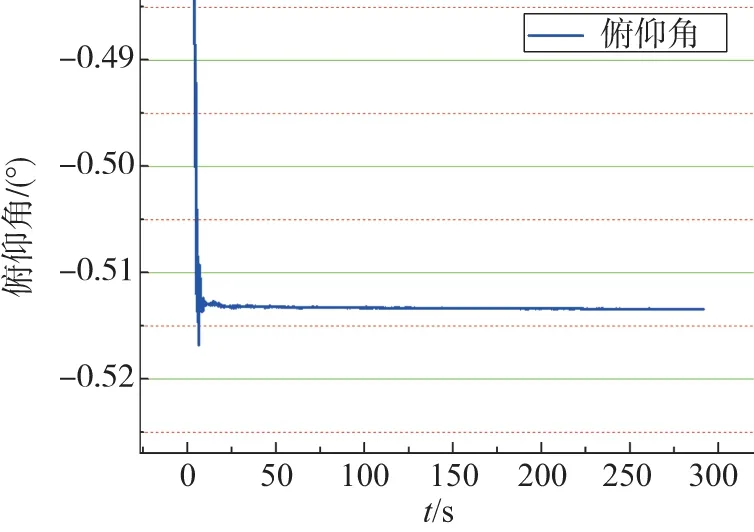
图5 某条次试验俯仰角估计值Fig.5 The pitch attitude estimation in experiment
由试验结果可以看出,本文提出的方法可以较快地完成方位角及纬度的估计,验证了本方法的正确性和有效性。
6 结论
本文针对旋转调制寻北问题,提出了一种利用单陀螺配合单加速度计进行旋转调制寻北的方法,该方法不需要输入初始纬度,不需要对平台进行精确调平,具有简单、实用、成本低等特点。文中对寻北方法的实现流程进行了详细的介绍,对计算公式进行了详细的推导,并利用原理样机进行了试验验证,结果表明,寻北重复性误差可以优于0.5mil(1σ),纬度估计误差为0.0538°(1σ)。
[1] 殷楠,刘建锋,葛磊,等. 陀螺随机游走对定向设备双位置寻北精度影响分析[J]. 电子设计工程,2015,23(24):110-112.
[2] 李险锋,杨海忠. 基于四位置法旋转调制寻北仪的轴向摆动分析[J]. 科学技术与工程,2012,12(29):7800-7802.
[3] 蒋庆仙,王成宾,马小辉,等. 利用AR模型进行动态寻北中有色噪声的控制[J]. 传感技术学报,2014,27(3):347-350.
[4] Yang J H, Zheng Q L, Yang H R, et al. The improvement of FOG north-seeker two-position north determinining scheme[C]. IEEE International Conference on Information and Automation, 2010:2248-2251.
[5] Zhang Y, Cao J L, Wu W Q, et al. The analysis of turntable error and arithmetic design for north-finder based on rate biased RLG[J]. Advanced Materials Research, 2011: 383-390.
[6] 薛海建,郭晓松,周召发,等. 激光陀螺任意二位置寻北仪及误差分析[J]. 红外与激光工程,2015,44(6):1784-1789.
[7] 王海明,李四海. 一种纬度未知的全姿态光纤陀螺寻北方法[J]. 中国惯性技术学报,2014,22(1):63-66.
[8] 段苛苛,李邓化. 光纤陀螺寻北仪连续旋转寻北方案及算法研究[J]. 仪器仪表学报,2014,35(4):801-806.
[9] 徐海刚,郭宗本. 一种实用旋转调制式陀螺寻北仪的设计[J]. 兵工学报,2010,31(5):616-619.
[10] 白云超,李学琴,马小辉,等. 采用旋转调制技术的高精度陀螺寻北方案[J]. 惯性技术学报,2010,18(4):421-424.
[11] Celikel O. Application of the vector modulation method to the north finder capability gyroscope as a directional sensor[J]. Measurement Science and Technology, 2011, 22(3):1-12.
[12] Eduardo S R, Vlandimir A N. Comparison between two basic schemes in function of the true earth’s north detection[C]//Saint Petersburg International Conference on Integrated Navigation Systems, 2006:315-318.
A Method for Revolution-Modulation North Seeker Based on Single Gyroscope and Accelerometer
LI Hai-jun, XU Hai-gang, PEI Yu-feng, GUO Yuan-jiang, SUN Wei
(Beijing Institute of Automatic Control Equipment,Beijing 100074,China)

Accelerometer;FOG;Revolution-modulation;North seeker;Kalman filter
10.19306/j.cnki.2095-8110.2016.05.008
2014-10-11;
2015-04-10。
李海军(1981-),男,硕士,高级工程师,主要从事导航、制导与控制方面的研究。E-mail:vantime@126.com
U666.1
A
2095-8110(2016)05-0041-05
猜你喜欢
空间电子技术(2021年4期)2021-11-10
导航与控制(2020年3期)2020-09-09
小学生学习指导(低年级)(2019年10期)2019-10-16
导航与控制(2019年4期)2019-09-25
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
快乐语文(2018年36期)2018-03-12
导航定位与授时(2017年5期)2017-09-20
齐鲁周刊(2017年29期)2017-08-08
中学政史地·教学指导版(2016年12期)2017-05-16
