
基于单差模糊度的GPS/GLONASS组合相对定位模型研究
2016-04-11 01:12章太馨刘炎炎鲍立桂叶世榕
测绘工程 2016年4期
章太馨,刘炎炎,鲍立桂,叶世榕,李 志
(1.武汉大学 卫星导航定位技术研究中心,武汉 430079;2.福建新大陆电脑股份有限公司,福建 福州 350015;3.西安市勘察测绘院,陕西 西安 710054)
基于单差模糊度的GPS/GLONASS组合相对定位模型研究
章太馨1,刘炎炎1,鲍立桂2,叶世榕1,李志3
(1.武汉大学 卫星导航定位技术研究中心,武汉 430079;2.福建新大陆电脑股份有限公司,福建 福州 350015;3.西安市勘察测绘院,陕西 西安 710054)
摘要:采用频分多址技术(FDMA),GLONASS系统双差模糊度固定存在两个问题:不同卫星波长不一致,双差后不能保持模糊度整数特性;共视卫星频率不同,不同卫星之间存在大小不同的频间偏差(IFB)。传统的双差不能很好处理GLONASS相对定位模糊度固定问题。文中考虑将双差所涉及的两颗卫星的站间单差模糊度分别求解,不受共视卫星波长不一致的影响。同时采用参数估计法消除不同厂商接收机的频间偏差影响。试验结果表明采用文中方法可以正确固定GLONASS模糊度,并且达到与GPS相当的解算精度,GPS/GLONASS组合定位精度和可靠性也比GPS单系统有所提高。
关键词:RTK;相对定位;模糊度;GPS/ GLONASS;频分多址
考虑波长不同对GLONASS双差模糊度固定带来的问题,提出一种新的GLONASS双差模糊度固定的解算方法。该方法通过直接求解站间单差模糊度来实现GLONASS双差模糊度的固定。由于不同卫星的单差模糊度是分别求解,一方面不再受不同卫星波长不一致的影响,为GLONASS模糊度提供更加严密的数学模型;另一方面不需要考虑参考卫星转换时带来的复杂问题。本文利用实测数据试验,验证该方法对GLONASS模糊度固定的效果,并且对比 GPS/GLONASS组合定位与单系统定位的结果,比较其在精度及性能方面的改善。
1传统的双差处理方法的问题
GPS相对定位中,通过星间、站间双差不仅可以消除接收机钟差、星历误差以及大气传播误差,同时又能得到整数特性的双差模糊度。但是由于GLONASS系统对测站的可视卫星波长都互不相同,采用传统双差的方法不能在消除接收机钟差的同时又得到具备整数特性模糊度。对于GLONASS系统的双差模糊度固定,目前有两种处理策略:
1)消除接收机钟差模型。消除接收机钟差
(1)
式中:p,q为两个共视卫星;m,n代表两个同步测站;为星间差分算子;Δ为站间差分算子;φ为以m为单位的相位观测值;ρ为包含基线参数的卫地几何距离;λ为载波相位波长;N为相位观测值模糊度。
将浮点的双差模糊度分解为整数的双差模糊度和参考卫星站间单差模糊度,从而保持模糊度的整数特性。参考卫星的单差模糊度通过站间单差伪距观测值进行求解,取整固定后再求解剩余双差模糊度。
2)估计接收机钟差模型。以周为单位,保持模糊度整数特性。但是接收机钟差不能消除
(2)
其中,Ø是以周为单位的相位观测值;c是真空中的光速;Δdt代表相对接收机钟差。
由以上分析可知,A,B这两种模型都要使用伪距辅助模糊度解算,从而都会受伪距精度的影响。因此,传统的双差方法不适合处理频分多址的GLONASS数据。本文提出直接估计并固定单差模糊度的新方法进行基线解算,同时将频间偏差进行参数估计,解决了组合定位中GLONASS模糊度固定的问题。
2基于单差模糊度固定的模糊度解算新方法
对于短基线小于10 km,采用站间差分的方法可以消除卫星轨道误差、卫星钟差以及大气传播误差,同时卫星端和接收机端的硬件延迟都在双差的过程中可以消除。因此,得到双差观测方程:
(3)
(4)
(5)
(6)

Wanniger指出GLONASS相位观测值频间偏差是与频率成正比关系的,建模:
(7)
其中,F对应卫星的载波频率索引值;Kmn为m,n两台接收机的频间偏差系数之差。
相位观测值频间偏差具有长期稳定性,且不受温度变化的影响,可以采用先验值进行改正;固定模糊度后,再将其作为参数估计。各厂商接收机频间偏差先验值如表1所示。
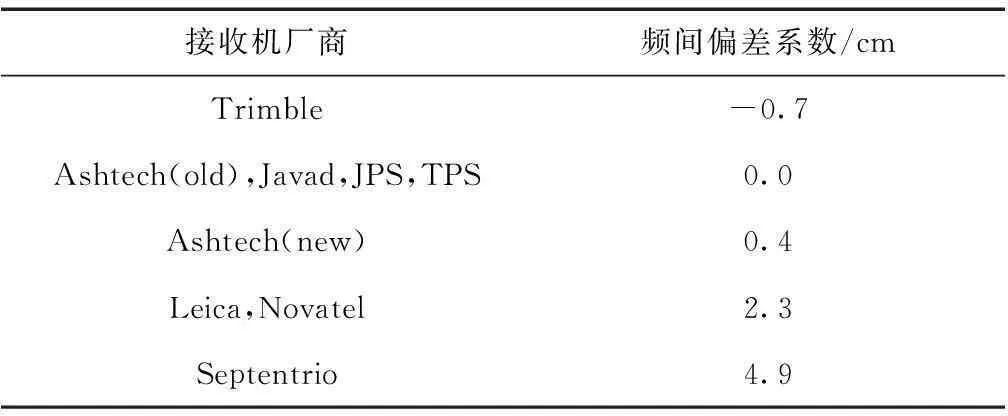
表1 不同厂商接收机频间偏差系数
对GLONASS系统,将每颗卫星的单差模糊度分别估计,从而保持每个单差模糊度的整数特性,为模糊度正确固定提供一个严密的数学模型。对GPS系统,采用双差模糊度估计会带来参考卫星转换的复杂问题,本文也采用估计单差模糊度的做法。
然而式(3)、式(5)中每个双差观测值对应的两个单差模糊度是强相关的,导致法方程秩亏,必须固定其中一个单差模糊度作为基准。同时由式(3)、式(5)可知,由于GPS和GLONASS是选用各自的参考卫星进行双差,两个系统必须各自引入基准才能求解。对GPS或GLONASS,本文选择将其中一个模糊度固定为使用伪距解算并取整的值作为基准,采用虚拟观测值的方法进行基准引入。上述基准卫星模糊度会受取整精度的影响,但 GLONASS不同卫星的波长之差较小(0.000 35~0.004 92周),基准卫星模糊度10周的误差对双差观测值产生的非整数影响最大不超过0.05周,相邻频段的卫星求差可进一步降低至0.003 5周,因此可较好地解决波长不同的问题,保证搜索的正确性;而对GPS卫星由于不同卫星波长完全一样该基准误差不会影响定位结果。假设对GPS和GLONASS分别选择模糊度NG,NR作为基准,并分别固定到NG0,NR0,那么对应虚拟观测值分别为
(8)
(9)
其中,υ为残差,P为该虚拟观测值的权。
(10)
(11)
上述两式分别加到法方程即可进行求解浮点模糊度,然后可以使用LAMBDA方法进行整数模糊度搜索。
数据处理时,可以在第一个历元将上述基准引入法方程,在处理后续历元时,只要该历元有至少一颗卫星没有发生周跳,该基准即可传递下去,后续历元就无需再添加基准信息。当发生数据中断或所有卫星都发生周跳时,需要在此后的第一个历元再次引入基准信息。数据处理流程如图1所示。
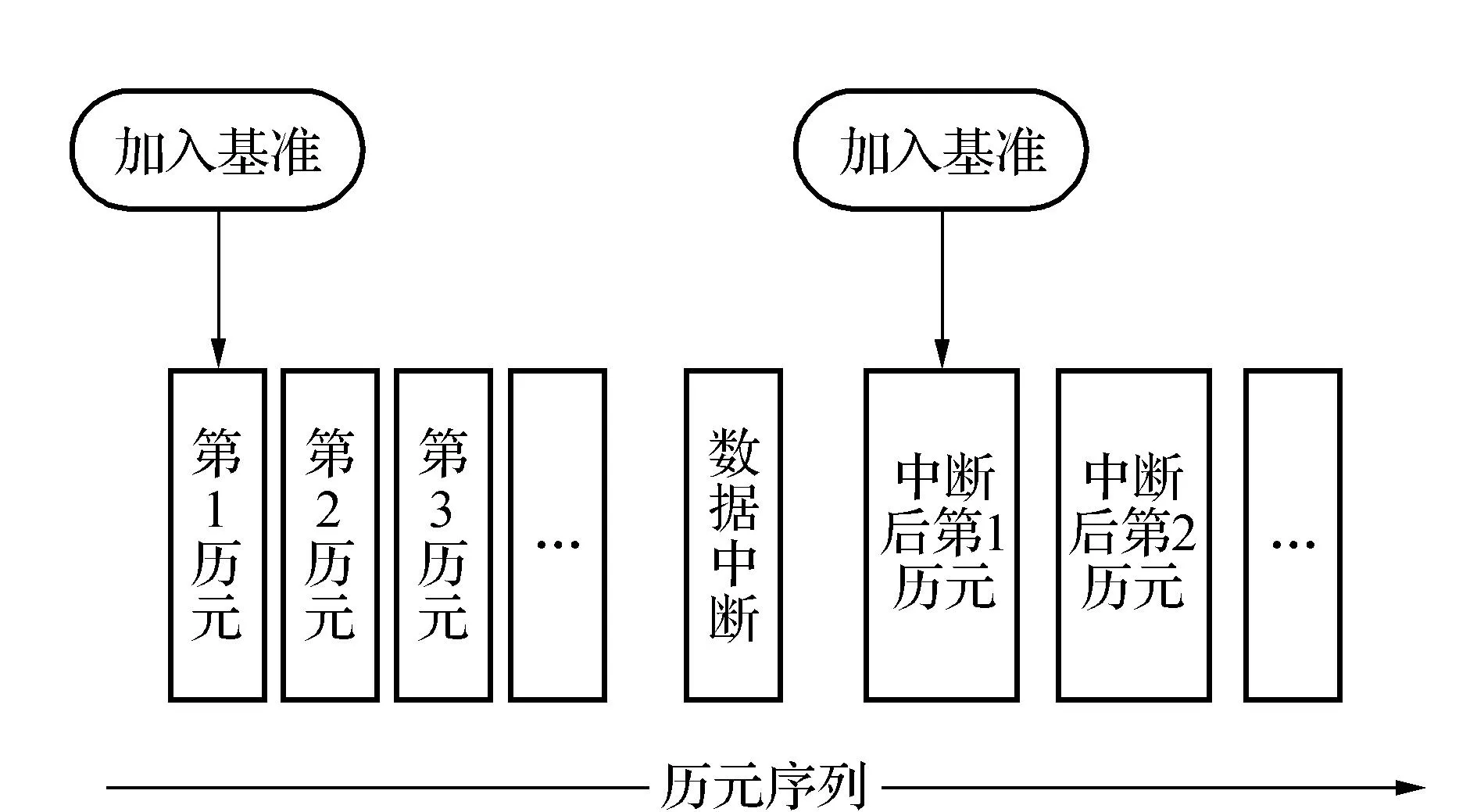
图1 数据处理流程
3实验验证
为了验证本文基于单差模糊度固定的双差解算方法正确性,本文采用一台Leica接收机和一台Trimble接收机组成了一条长3 km的基线,采集了1 d的观测数据,对GPS、GLONASS以及GPS+GLONASS的定位结果进行分析。数据处理策略如表2所示。
由表2可知,两个测站相对频间偏差系数为3 cm,其对各卫星的影响如图2所示。由图2中可以看出,有10颗卫星的相位观测值频间偏差在10 cm以上,其中R10、R14号卫星最大,可达21 cm,因此GLONASS模糊度固定时,必须改正频间偏差的影响。
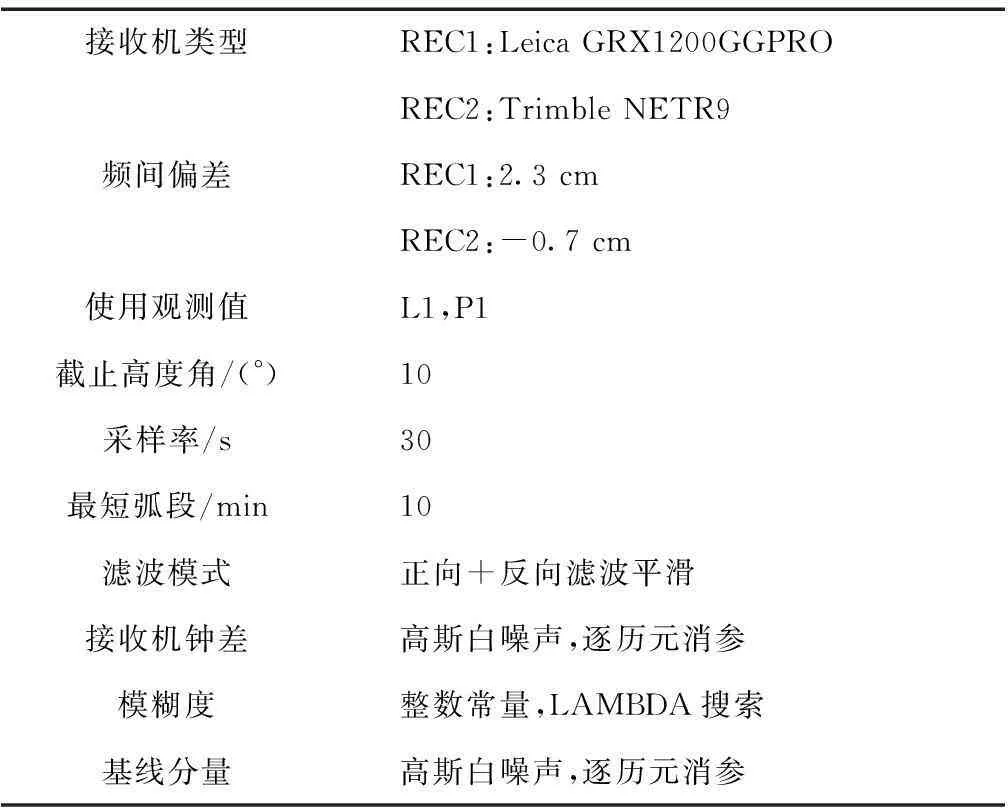
表2 基线信息及数据处理策略
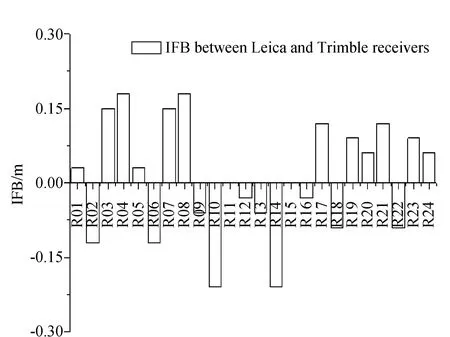
图2 相对频间偏差对不同卫星的影响
由图3的定位残差时间序列可以看出,几乎每个历元每颗卫星的残差都在6 cm内,同时由于本实验采用的是正向+反向滤波平滑的方式求解,可以认为每个历元的模糊度都得以正确固定,结果均为模糊度固定解。图4、图5、图6分别给出了GPS,GLONASS,GPS+GLONASS 3种组合方式在E,N,U 3个方向上的定位偏差。从图4~6中可以看出来,采用本文方法,消除了GLONASS频间偏差以及共视卫星波长不一致的影响,每颗卫星模糊度都能正确固定。由于GLONASS卫星分布不理想,以及数据预处理导致卫星个数较少,GLONASS系统单独解算结果,在250历元(2 h附近)和1 500历元(12 h附近)有较大的偏差,而GPS系统相对较好,只是在第1 000历元(8 h附近)处E方向有较大偏差。而采用GPS/GLONASS组合系统定位结果明显由于单独的GPS或GLONASS系统,上述所有定位偏差都得以消除。3种组合策略的精度统计如图7所示,GPS/GLONASS组合定位,在E,N,U 3个方向定位精度比单独的GPS、GLONASS系统都分别提高10%、50%。

图3 GPS、GLONASS各卫星 L1残差时间序列图
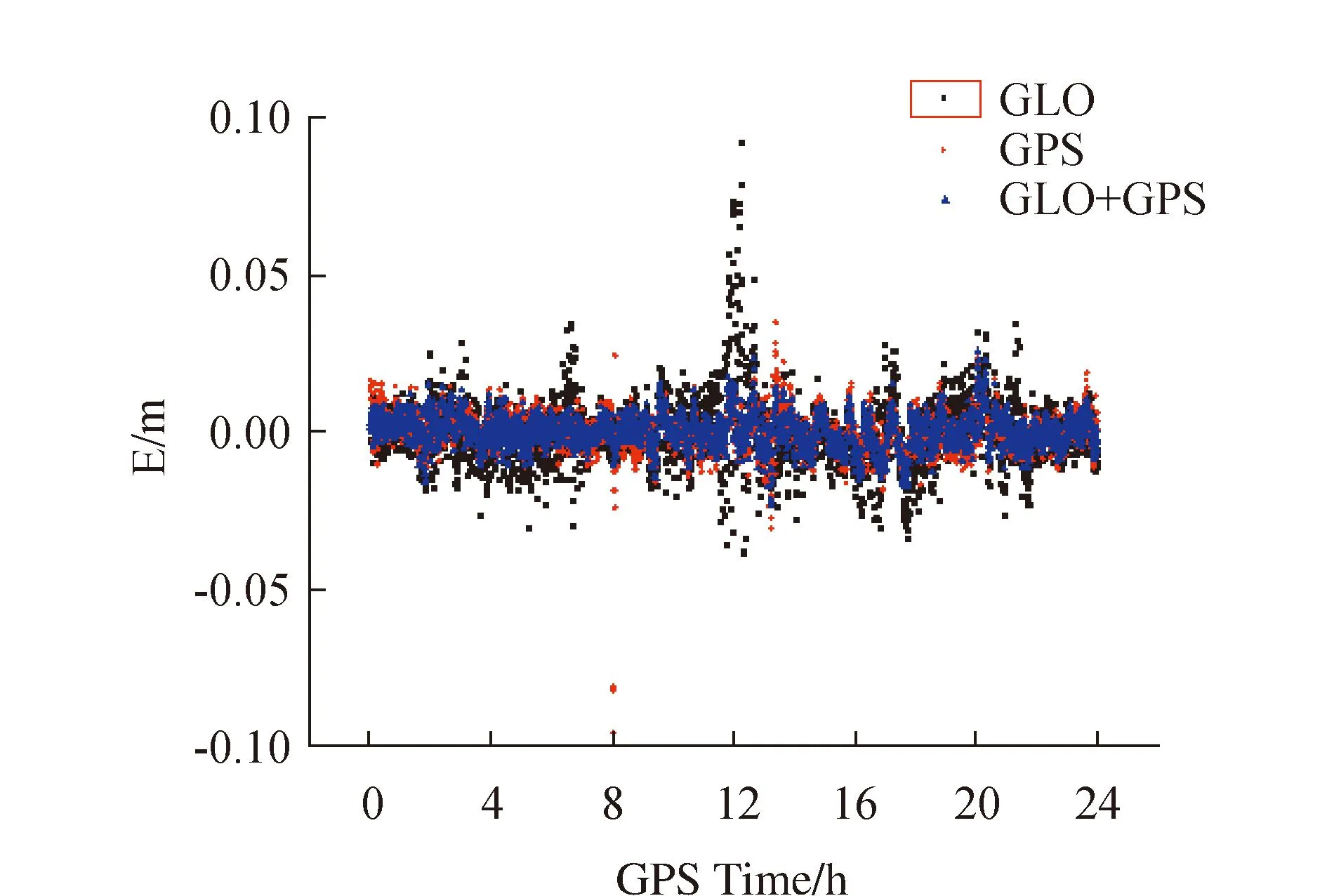
图4 E方向逐历元定位结果

图5 N方向逐历元定位结果

图6 U方向逐历元定位结果

图7 3种组合方式精度统计
4结论
针对GLONASS不同卫星波长不一致及频间偏差导致的双差模糊度难以正确固定问题,本文提出了一种基于站间单差模糊度固定的双差解算新方法,同时估计接收机频间偏差参数。实验证明,采用本文方法,可以正确固定GLONASS模糊度,不同厂商接收机频间偏差也得以正确处理,GPS/GLONASS组合相对定位结果的可靠性有明显提高,动态精度比单一GPS、GLONASS系统分别提高10%、50%。
参考文献:
[1]鲍建宽,范兴旺,高成发.4种全球定位系统的现代化及其坐标转化[J].黑龙江工程学院学报(自然科学版),2013,23(1):36-40.
[2]WANG Jinling,RIZOS C,STEWART M P,et al.GPS and GLONASS integration:modeling and ambiguity resolution issues[J].GPS solutions,2001,5(1):55-64.
[3]WANNINGER L,WALLSTAB-FREITAG S.Combined processing of GPS,GLONASS,and SBAS code phase and carrier phase measurements[C].//Proc.ION GNSS,2007.
[4]WANNINGER L.Carrier-phase inter-frequency biases of GLONASS receivers[J].Journal of Geodesy,2012,86(2):139-148.
[5]LEICK A.GLONASS satellite surveying[J].Journal of surveying engineering,1998,124(2):91-99.
[6]DACH R,HUGENTOBLER U,FRIDEZ P,et al.Bernese GPS Software Version 5.0[M].Astronomical Institute,University of Bern.2007,Stämpfli Publications AG,Bern.
[7]WANG Jinling.Mathematical models for combined GPS and GLONASS positioning[C].//Proc.ION GPS 1998.
[8]张绍成.基于GPS/GLONASS集成的CORS网络大气建模与RTK算法实现[D].武汉:武汉大学,2010.
[9]周海涛,袁新英,罗力.Helmert验后方差估计在GPS/GLONASS组合单点定位中的应用[J].测绘与空间地理信息,2015,38(4):153-155.
[10] 张小红,李盼,李星星,等.宽巷载波相位模糊度小数偏差时变特性分析[J].测绘学报,2013(6):798-803,809.
[11] AL-SHAERY A,ZHANG Shaocheng,RIZOS C.An enhanced calibration method of GLONASS inter-channel bias for GNSS RTK[J].GPS solutions,2013,17(2):165-173.
[责任编辑:李铭娜]
Combined GPS/GLONASS relative positioning based on single difference ambiguity resolution
ZHANG Taixin1,LIU Yanyan1,BAO Ligui2,YE Shirong1,LI Zhi3
(1.Research Center of GNSS,Wuhan University,Wuhan 430079,China;2.Fujian Newland Computer Co.,Ltd.,Fujian 350015,China;3.Xi’an Institute of Prospecting and Mapping, Xi’an 710054,China)
Abstract:Traditional double-difference approach can’t deal with FDMA system of GLONASS,in which different satellite has different wave length,and different hardware delay.A new method based on single-difference ambiguity parameters is proposed in this paper.Individual ambiguity parameter is set for each satellite,and the hardware delay difference is parameterized.Data process results have indicated that,using the proposed approach,the Glonass ambiguity can be easily fixed,and comparable position precision with GPS can be achieved.
Key words:RTK;relative position;ambiguity;GPS/GLONASS;FDMA
中图分类号:P208
文献标识码:A
文章编号:1006-7949(2016)04-0033-04
作者简介:章太馨(1991-),女,硕士研究生.
收稿日期:2015-03-17;修回日期:2015-04-30
