自适应神经模糊推理系统在信号去噪中的应用
2016-07-18 00:40李娟
湖北科技学院学报 2016年4期
李 娟
(运城学院 物理与电子工程系,山西 运城 044000)
自适应神经模糊推理系统在信号去噪中的应用
李娟
(运城学院物理与电子工程系,山西运城044000)
摘要:介绍了基于自适应神经模糊推理系统的语音去噪方法,这种算法把模糊系统理论和人工神经网络相结合,继承了二者的优点,通过神经网络强大的自学能力,弥补了模糊推理系统非常依赖于操作人员的经验的缺陷。有色噪声是功率谱密度函数不为常数的噪声,很难去除,仿真实验证明:使用自适应神经模糊推理系统能较好的去除测量信号中的有色噪声。
关键词:自适应神经模糊推理系统;ANFIS;信号去噪
1965年美国加州大学的LA.Zadeh教授提出了模糊系统理论,由模糊集合理论、模糊逻辑、模糊控制和模糊推理等组成。其中模糊控制系统是处理模型未知的一种模型工具,广泛应用于信号处理中,并十分具有应用前景,获得了众多学者专家的认同。但是也有缺点,设计模糊推理系统时虽然对于对象的模型没有依赖,却相当依赖于操作人员和专家的实际经验和理论知识[1,2]。神经网络(Neural Network,NN)是一种对信息进行分布式并行处理,可以模仿动物神经网络行为特征的数学模型算法,这种算法具有非常强的自学习能力,但是也有缺点,在进行大量数据训练后,才能处理结构化的知识。通过自学习,借助神经网络的并行分布结构来估计从输入到输出的映射关系。
模糊控制系统与神经网络在控制领域中是举足轻重并且十分活跃的两种算法,这两种控制方法自身都有明显的优点,但又存在一定的缺陷,把两种方法相结合,吸取优点、摒弃缺点是控制系统理论推进的必然产物。把神经网络的自学习训练过程引入模糊控制系统,将构成一个带有人类感觉和认知成分的自适应系统,是一种将人工神经网络以及模糊逻辑相结合的新型推理系统结构,即自适应神经模糊推理系统[3~5](Adaptive Neural Fuzzy Inference System,ANFIS)。在信号处理领域,如果信号淹没在噪声中,而且噪声影响较大,我们想得到纯净信号,如果噪声是高斯白噪声,可以使用线性滤波方法;如果噪声是有色噪声,那么使用非线性滤波就是一种更为有效的处理方式。而把人工神经网络与模糊控制系统互相结合的自适应神经模糊推理系统(ANFIS)非常适合做为非线性滤波器[6,7]。
一、自适应神经模糊推理系统(ANFIS)
ANFIS也被称之为Sugeno型模糊推理系统,它融合了模糊系统(Fuzzy Inference System,FIS)和神经网络(NN),在ANFIS的训练过程中,通过神经网络的自学习,模糊系统中输入变量的隶属度函数得到调整,与此同时系统根据输入变量的数量自动生成响应的模糊规则,使得这个模糊系统模型的响应不断逼近给定的训练数据[8]。
具体实施步骤如下:
ANFIS由前件、后件组合而成,两输入对应单输出系统的运算规则是:
IfX为G1,Y为H1,则Z1=p1X+q1Y+r1
If X为G2,Y为H2,则Z2=p2X+q2Y+r2
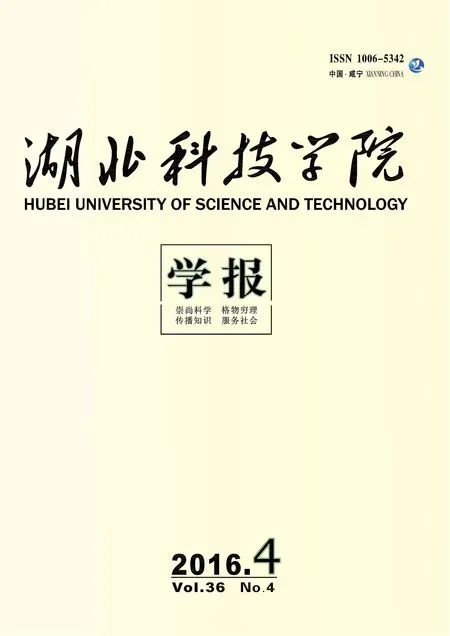
如果两个输入变量均采用高斯型隶属度函数,用gxi(X,ai,bi)和gyi(Y,ci,di)来表示(其中i=1,2),如图1,一阶Sugeno模糊系统表示一个两输入对应单输出的演变过程,等效成ANFIS结构。
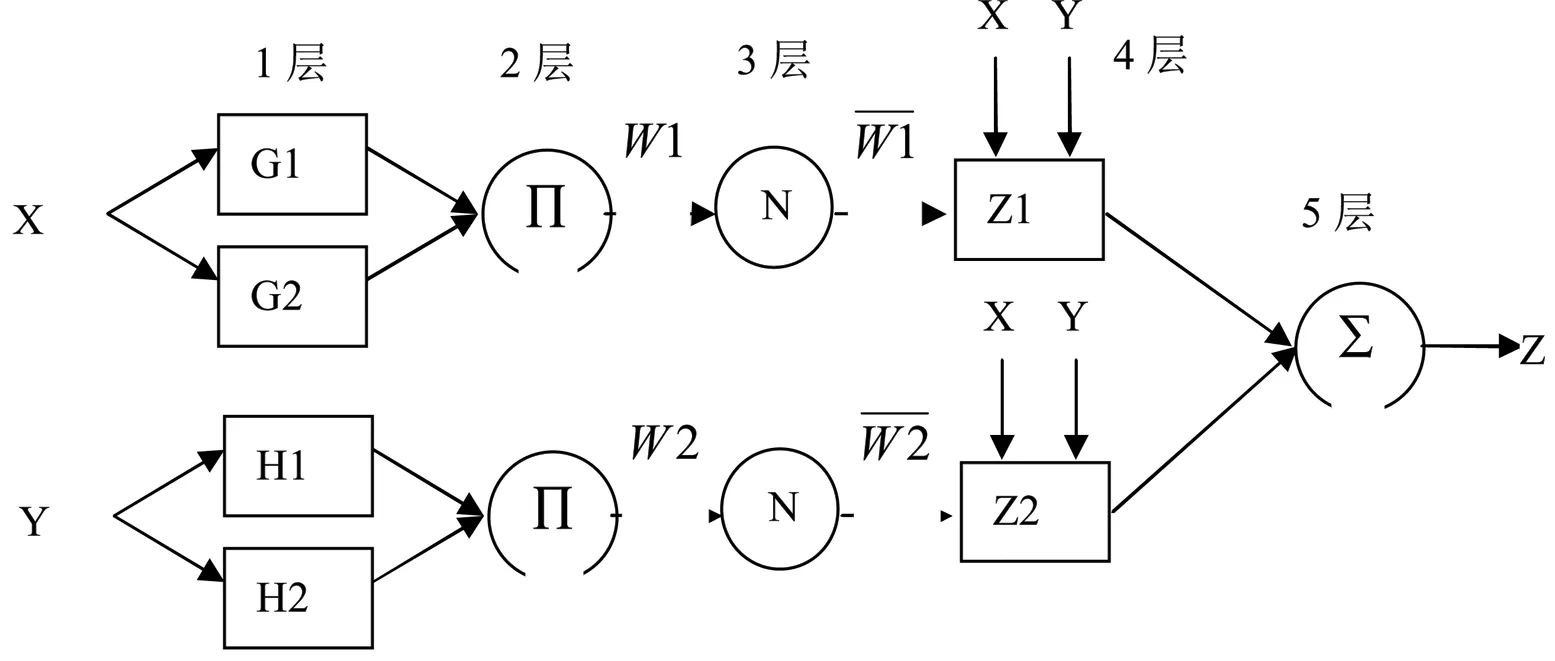
图1Sugeno模糊系统的ANFIS结构
把ANFIS结构分成五层:
第1层:计算输入变量的模糊隶属度函数
O1,i=gxi(x,ai,bi),i=1,2
O1,j=gy(j-2)(y,cj-2,bj-2),j=3,4
其中O1,i的下标表示第1层输出的第i个。
第2层:计算适用度。
O2,1=O1,1×O1,3=gx1(x,a1,b1)×gy1(y,c1,d1)记为W1
O2,2=O1,2×O1,4=gx2(x,a2,b2)×gy2(y,c2,d2)记为W2
第3层:归一化适用度。

第4层:分别算出每条规则的响应。
Zi=pix+qiy+rii=1,2
第5层:最后计算模糊系统的输出量。

二、ANFIS应用于语音去噪中的基本原理
噪声是一个随机信号,而随机过程是用功率谱密度函数表征的,功率谱密度函数的形态数值可以决定噪声的“颜色”。 整个时域内功率谱密度函数为一常数,则颜色为“白色”,即“白噪声”。功率谱密度函数不为常数噪声称为“有色噪声”。日常生活中大多数的噪声,比如电风扇的噪声、汽车的噪声、周围工地施工的噪声等,其频谱主要集中在非白色的低频段,属于有色噪声。白噪声通过非线性动态之后可以构成有色噪声,一般测量信号就是有用信号和有色噪声的混合。信号滤波的主要目的就是消除噪声获得有用信号。使用ANFIS动态建模,非线性逼近有色噪声,去除测量信号中的有色噪声部分,最终得到有用信号。利用ANFIS对噪声进行剔除的原理框图如图2所示。
图中有用信号用s(k)表示,噪声源用n(k)和n(k-1)表示,有色噪声是噪声源通过非线性函数获得d(k)=f(n(k),n(k-1)),测量信号是有用信号和有色噪声之和,即x(k)=s(k)+d(k),ANFIS主要任务是对有色噪声d(k)进行逼近复现得到d(k)′,它的输入是噪声源n(k)和n(k-1),训练数据中的输出是逼近的有色噪声d(k)′,在测量信号中去掉逼近的有色噪声,获得估计信号s(k)′,即s(k)′=x(k)+d(k)′。估计信号s(k)′和原有用信号s(k)越逼近,说明ANFIS的效果越好。

图2 噪声消除的基本原理
三、仿真实例
仿真1:从时域角度研究模糊理论检测测量信号中的有用信号


图3 (a)测量信号

图3 (b)噪声的ANFIS逼近
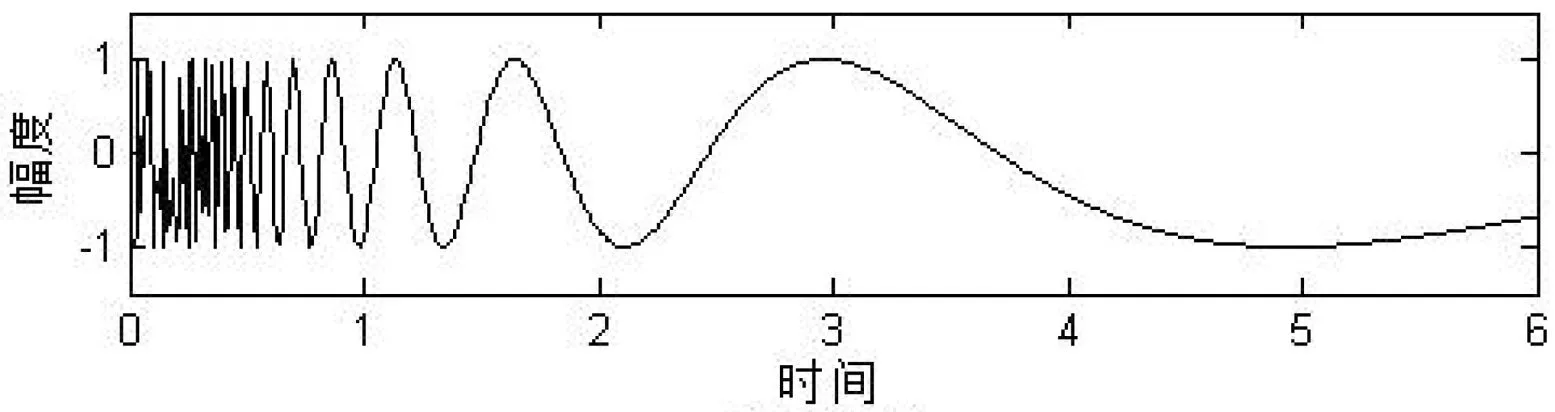
图4 (a)有用信号
图4 (b)信号估计
图3(a)是测量信号x(k),可以看出有用信号已经淹没在有色噪声中,看不出明显特征了。图3(b)是噪声的模糊逼近d(k)′。估计的有用信号
s(k)′=x(k)+d(k)′如图4(b)所示,图4(a)的原有用信号s(k)和图4(b)估计的有用信号s(k)′从轮廓上已经十分逼近。说明ANFIS用于语音去噪的效果较好。
仿真2:从频域角度研究模糊理论检测测量信号中的有用信号
假如原有用信号包含两个频率分量:
s(t)=4sin(2πt)+7cos(7πt)
有色噪声是白噪声经过非线性函数f(k)之后得到,即:
其中n(t)表示白噪声,n(n-1)是n(t)的前一时刻数值,测量信号为
x(t)=s(t)+d(t)
要求从测量信号中逼近出原有用信号。

图5(a)信号

图5(b)有色噪声

图5 (c)测量信号
图5(a)中,有用信号是一个复合的周期信号,图5(b)有色噪声是将白噪声通过非线性系统后得到的,图5(c)测量信号是把有用信号加入有色噪声的波形。可以看出有色噪声对原信号的干扰很大,有用信号已经淹没在噪声中。

图6 (a)信号

图6 (b)测量信号

图6 (c)噪声的模糊逼近

图6 (d)信号估计
图6(c)中,白噪声经过自适应神经模糊推理系统(ANFIS)得到噪声的模糊逼近,近似有色噪声,把噪声的模糊逼近从测量信号中剔除,得到图6(d)信号估计。可以看出估计的信号与原信号图6(a)相对比,基本轮廓十分相似,表明ANFIS成功对非线性动态进行了建模,但是仍有一些高频毛刺,基本恢复效果较好。
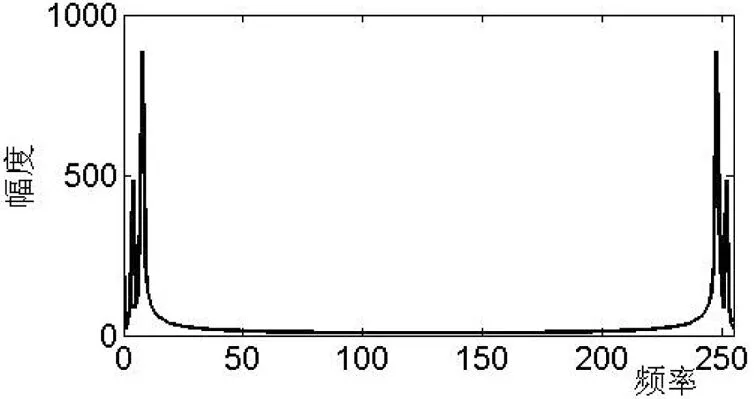
图7(a)信号的频谱
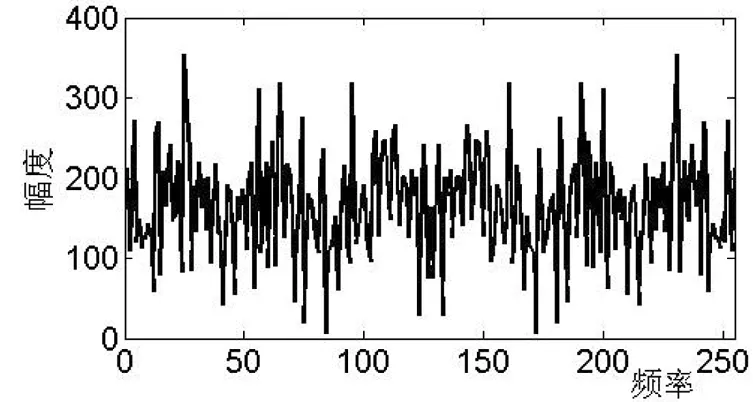
图7(b)有色噪声的频谱

图7(c)测量信号的频谱
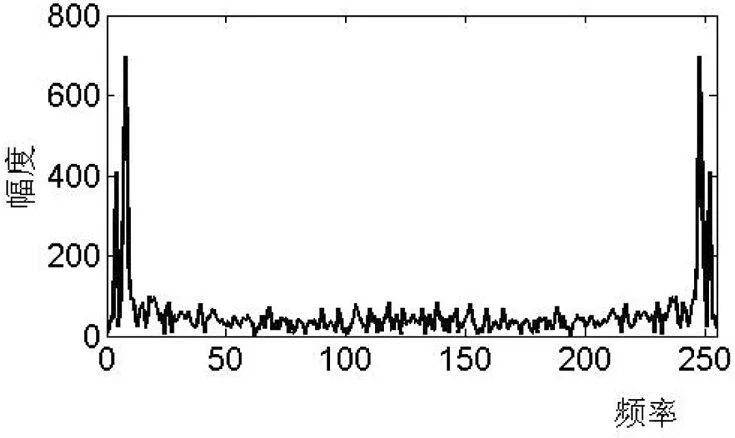
图7(d)信号估计的频谱
图7中,把原信号的频谱图7(a)中混入有色噪声频谱图7(b),得到测量信号频谱图7(c)。从使用ANFIS得到信号估计频谱图7(d)中可以看出,比测量信号中的干扰减少了很多,取得了一定的效果。原信号和信号估计的频率相比较,这两者十分相似,但是在估计信号里面包括部分高频分量,如果能再通过低通滤波器,那么恢复质量更高。
四、结语
自适应神经模糊推理系统(ANFIS)是在结合了神经网络和模糊理论的基础上发展起来的,克服了二者的确定。把ANFIS应用于信号去噪中,从仿真实验中可以看出,从混入有色噪声的测量信号中剔除噪声,得到估计信号,取得了较好的还原效果。
参考文献:
[1]曹国强,徐堃. 自适应神经模糊推理系统在脉冲电解加工中的应用研究[J]. 机械工程师,2016,(1):67~69.
[2]罗海驰, 李岳阳, 孙俊. 一种基于自适应神经模糊推理系统的图像滤波方法[J]. 计算机科学,2013,(7):302~306.
[3]王艳永, 邓方, 孙健. 改进的自适应神经模糊推理系统的角度传感器误差补偿方法[J]. 控制理论与应用,2013,(10):1 342~1 346.
[4]秦炎峰,陈铁军. 自适应神经模糊推理系统的参数优化方法[J]. 微计算机信息,2008,(18):222~224.
[5]董小丽. 基于云模型的自适应神经模糊推理系统的装备保障态势评估方法的研究[D]. 兰州:兰州大学,2015.
[6]孙川川. 基于自适应神经模糊推理系统的离心式压缩机建模[D]. 银川:宁夏大学,2014.
[7]张浩炯,余岳峰,王强. 应用自适应神经模糊推理系统(ANFIS)进行建模与仿真[J]. 计算机仿真,2002,19(4):47~49.
[8]顾秀萍. 自适应神经模糊推理系统(ANFIS)及其仿真[J]. 火力与指挥控制,2010,35(2):48~53.
文章编号:2095-4654(2016)04-0009-03
收稿日期:2016-01-05
基金项目:运城学院教学改革研究项目(JG201409)
中图分类号:TN912.3
文献标识码:A